




UART
概述
功能简介
UART指异步收发传输器(Universal Asynchronous Receiver/Transmitter),是通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输。
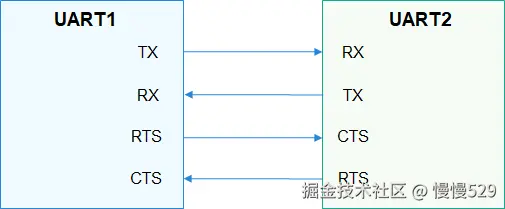
两个UART设备的连接示意图如下,UART与其他模块一般用2线(图1)或4线(图2)相连,它们分别是:
- TX:发送数据端,和对端的RX相连。
- RX:接收数据端,和对端的TX相连。
- RTS:发送请求信号,用于指示本设备是否准备好,可接受数据,和对端CTS相连。
- CTS:允许发送信号,用于判断是否可以向对端发送数据,和对端RTS相连。
图 1 2线UART设备连接示意图
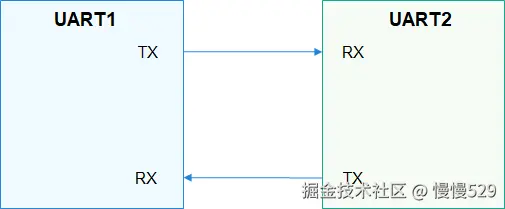
图 2 4线UART设备连接示意图
UART通信之前,收发双方需要约定好一些参数:波特率、数据格式(起始位、数据位、校验位、停止位)等。通信过程中,UART通过TX发送给对端数据,通过RX接收对端发送的数据。当UART接收缓存达到预定的门限值时,RTS变为不可发送数据,对端的CTS检测到不可发送数据,则停止发送数据。
基本概念
-
异步通信
异步通信中,数据通常以字符或者字节为单位组成字符帧传送。字符帧由发送端逐帧发送,通过传输线被接收设备逐帧接收。发送端和接收端可以由各自的时钟来控制数据的发送和接收,这两个时钟源彼此独立,互不同步。异步通信以一个字符为传输单位,通信中两个字符间的时间间隔是不固定的,然而在同一个字符中的两个相邻位代码间的时间间隔是固定的。
-
全双工传输(Full Duplex)
此通信模式允许数据在两个方向上同时传输,它在能力上相当于两个单工通信方式的结合。全双工可以同时进行信号的双向传输。
运作机制
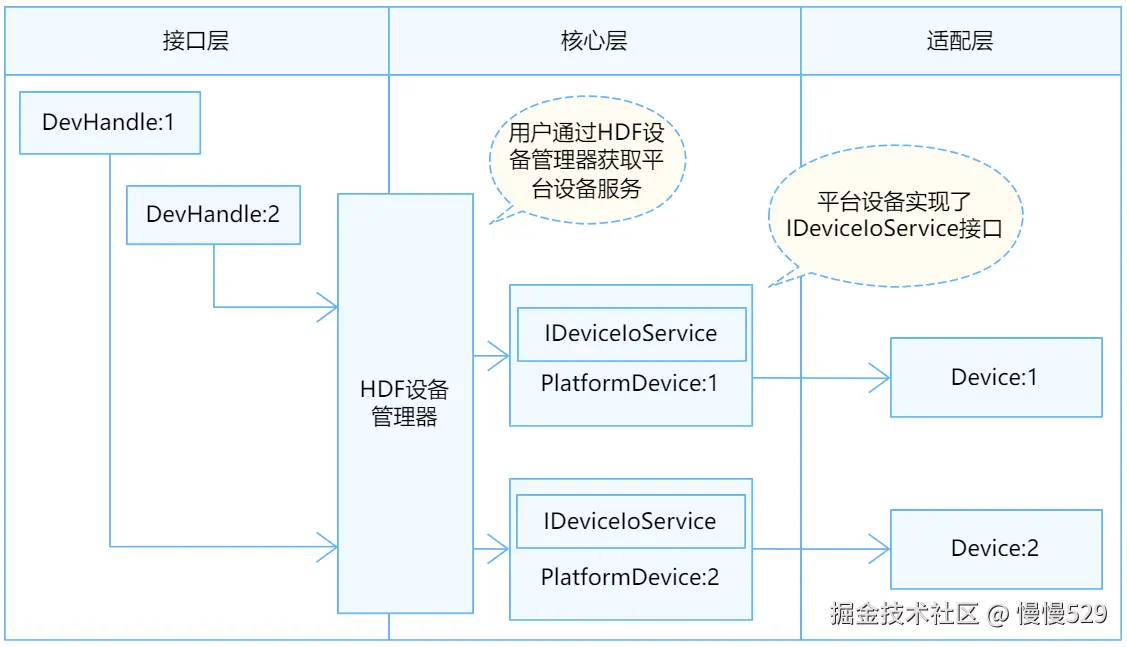
在HDF框架中,UART接口适配模式采用独立服务模式(如图3所示)。在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDF设备管理器的服务管理能力,但需要为每个设备单独配置设备节点,增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
- 驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
- device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
UART模块各分层作用:
- 接口层提供打开UART设备、UART设备读取指定长度数据、UART设备写入指定长度数据、设置UART设备波特率、获取设UART设备波特率、设置UART设备属性、获取UART设备波特率、设置UART设备传输模式、关闭UART设备的接口。
- 核心层主要提供UART控制器的创建、移除以及管理的能力,通过钩子函数与适配层交互。
- 适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 3 UART独立服务模式结构图
开发指导
场景介绍
UART模块应用比较广泛,主要用于实现设备之间的低速串行通信,例如输出打印信息,当然也可以外接各种模块,如GPS、蓝牙等。当驱动开发者需要将UART设备适配到OpenHarmony时,需要进行UART驱动适配。下文将介绍如何进行UART驱动适配。
接口说明
为了保证上层在调用UART接口时能够正确的操作UART控制器,核心层在//drivers/hdf_core/framework/support/platform/include/uart/uart_core.h中定义了以下钩子函数,驱动适配者需要在适配层实现这些函数的具体功能,并与钩子函数挂接,从而完成适配层与核心层的交互。
UartHostMethod定义:
struct UartHostMethod {
int32_t (*Init)(struct UartHost *host);
int32_t (*Deinit)(struct UartHost *host);
int32_t (*Read)(struct UartHost *host, uint8_t *data, uint32_t size);
int32_t (*Write)(struct UartHost *host, uint8_t *data, uint32_t size);
int32_t (*GetBaud)(struct UartHost *host, uint32_t *baudRate);
int32_t (*SetBaud)(struct UartHost *host, uint32_t baudRate);
int32_t (*GetAttribute)(struct UartHost *host, struct UartAttribute *attribute);
int32_t (*SetAttribute)(struct UartHost *host, struct UartAttribute *attribute);
int32_t (*SetTransMode)(struct UartHost *host, enum UartTransMode mode);
int32_t (*pollEvent)(struct UartHost *host, void *filep, void *table);
};
表 1 UartHostMethod结构体成员的回调函数功能说明
| 函数 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| Init | host:结构体指针,核心层UART控制器 | 无 | HDF_STATUS相关状态 | 初始化Uart设备 |
| Deinit | host:结构体指针,核心层UART控制器 | 无 | HDF_STATUS相关状态 | 去初始化Uart设备 |
| Read | host:结构体指针,核心层UART控制器 size:uint32_t类型,接收数据大小 | data:uint8_t类型指针,接收的数据 | HDF_STATUS相关状态 | 接收数据RX |
| Write | host:结构体指针,核心层UART控制器 data:uint8_t类型指针,传入数据 size:uint32_t类型,发送数据大小 | 无 | HDF_STATUS相关状态 | 发送数据TX |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4058
4058

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









