







 本文介绍如何利用里程计获取轮式机器人的左右轮转速,并据此计算机器人前进的距离和旋转角度,实现机器人位置的估计。通过计算左右轮行进距离之差与轴距的比例,可以得出机器人的转向角度。
本文介绍如何利用里程计获取轮式机器人的左右轮转速,并据此计算机器人前进的距离和旋转角度,实现机器人位置的估计。通过计算左右轮行进距离之差与轴距的比例,可以得出机器人的转向角度。
我们一般使用里程计odometry获取轮式机器人左右轮子的转速,从而计算出机器人前进的距离,进一步估算出机器人相对于上一次的运动位置。里程计除了可以计算距离也可以计算机器人的转角。
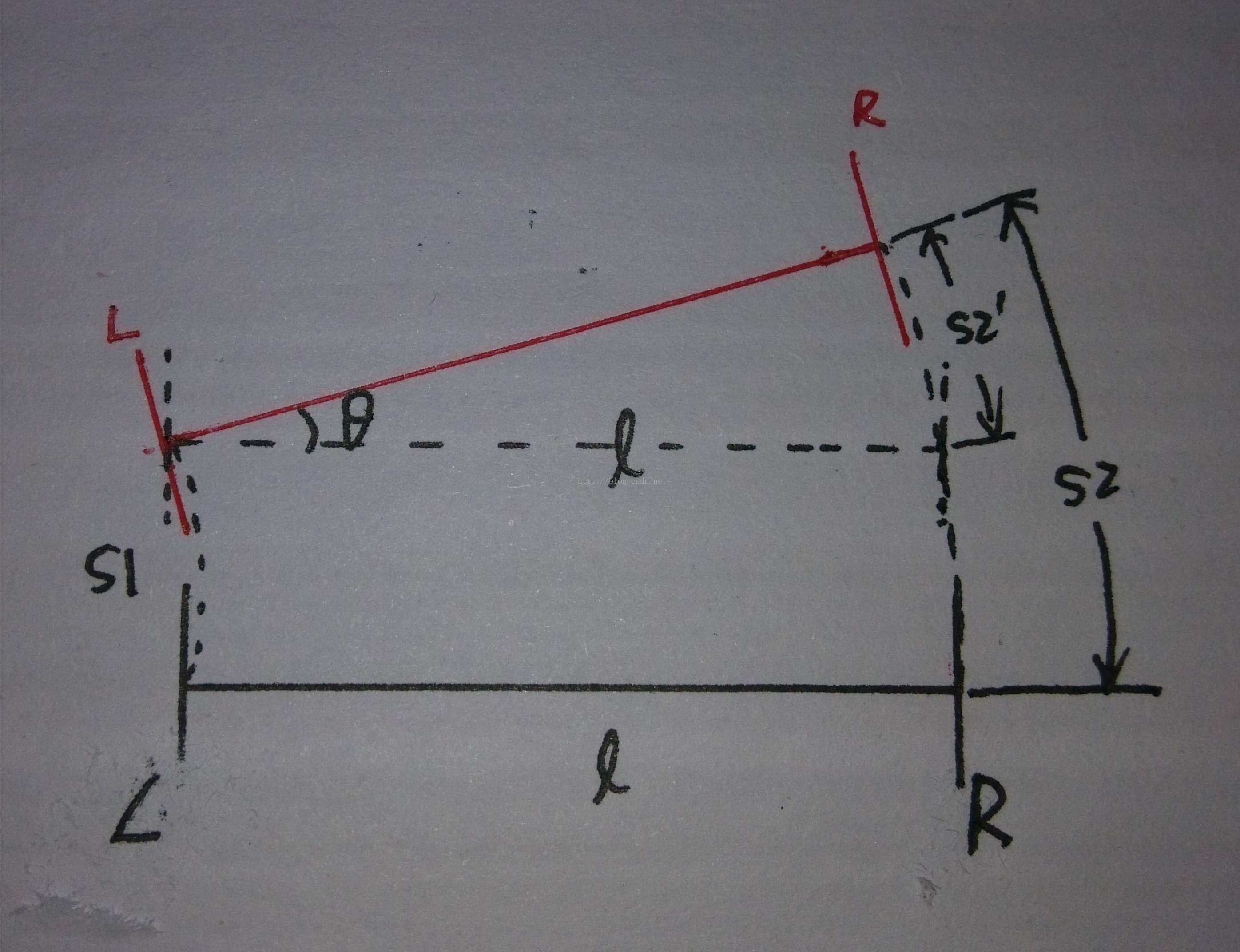
如上图所示,机器人运动到红色位置。通过里程计,我们可以计算出左轮和右轮行进的距离S1和S2。在进行位置估计时,机器人前后位置相差是比较小的,因此弧段S1和S2可以看做是直线段。右轮行进的距离减去左轮行进的距离得到距离差S2',再除以轴距l,即可得到机器人转过的角度theta。
即:theta= (rpmR-rpmL)*dt*wheel_diameter*π/(60*l),其中rpmR是右轮的转速,rpmL是左轮的转速,wheel_diameter是轮子的直径,l是轴距。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









