 Linux SPI通用字符设备介绍与实例分析
Linux SPI通用字符设备介绍与实例分析





Linux SPI设备分析5(基于Linux6.6)---SPI 通用字符设备介绍
一、spi通用字符设备概述
SPI 通用字符设备(SPI generic character device)是指通过字符设备模型将 SPI 外设暴露给用户空间,使得用户能够通过标准的字符设备接口(如 open, read, write, ioctl 等)访问和控制 SPI 外设。这样做的优势是用户可以使用常见的文件操作接口来与 SPI 外设进行交互,而无需了解具体的硬件细节或驱动细节。
在 Linux 中,SPI 通常是通过 spi_device 结构体与硬件通信的,而 SPI 驱动程序则负责将外设绑定到 SPI 总线,创建和管理 spi_device 设备。为了让 SPI 设备通过字符设备接口与用户空间进行交互,驱动程序可以实现 SPI 通用字符设备。
1.1、为Spi 通用字符设备创建而注册的spi driver
spi模块为通用字符设备创建的spi driver如下,该驱动实现的功能如下:
- 该驱动可匹配的spi设备有两种:
- spi_device->modalias的值为“spidev”
- 针对支持设备树的内核,设备节点的compatible为“rohm,dh2228fv”的spi设备
- 在spidev_probe接口中,根据传递的spi device参数,完成对应spi通用字符设备的注册,字符设备名称为“"spidevX.Y"”(其中X为spi总线号,Y为spi设备对应的片选序号)
- 在spidev_remove接口中,完成字符设备的注销操作。
drivers/spi/spidev.c
static struct spi_driver spidev_spi_driver = {
.driver = {
.name = "spidev",
.of_match_table = spidev_dt_ids,
.acpi_match_table = spidev_acpi_ids,
},
.probe = spidev_probe,
.remove = spidev_remove,
.id_table = spidev_spi_ids,
/* NOTE: suspend/resume methods are not necessary here.
* We don't do anything except pass the requests to/from
* the underlying controller. The refrigerator handles
* most issues; the controller driver handles the rest.
*/
};
1.2、spi通用字符设备驱动创建流程
SPI 模块提供的通用字符设备是与具体的spi设备向关联的,必须创建一个设备名称或者设备节点名称固定的spi device(spi 设备名称为“spidev”或设备节点名称为“rohm,dh2228fv”),然后与spi驱动模块注册的spi 驱动匹配,方才触发spi 通用字符设备的创建。
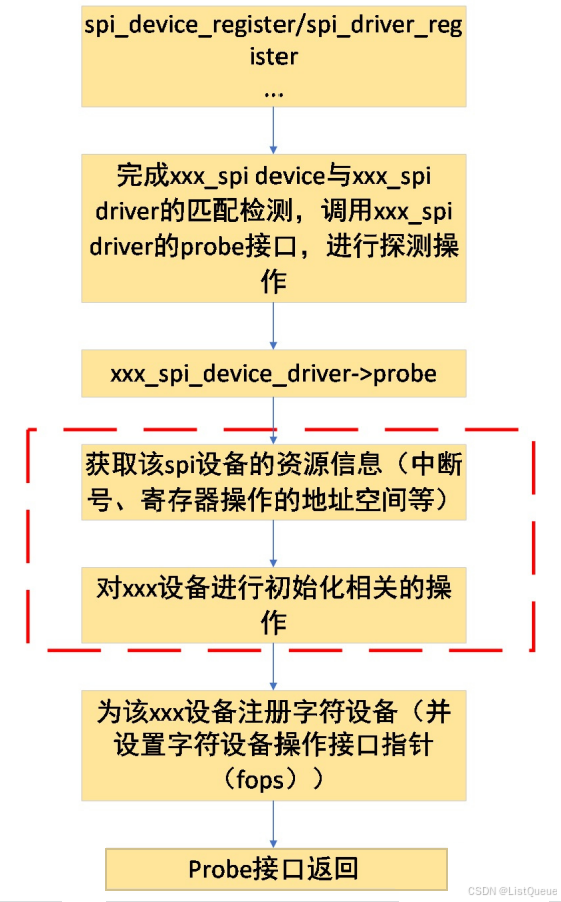
其实spi通用字符设备与spi驱动中实现字符设备的流程基本上是一致的,区别是会在spi驱动的probe接口进行一些spi设备的初始化操作,而spi通用字符设备创建所对应的spi驱动的probe仅用来创建字符设备。如下图所示,创建spi 字符设备的创建流程,将这个流程图中的红色虚线框中的内容去除,即为spi通用字符设备驱动的创建流程。
二、spi通用字符设备的操作接口
在接口spidev_init中,完成了主设备号为SPIDEV_MAJOR,次设备号为0的spi字符设备的创建,该字符设备文件对应的处理接口为spidev_fops,其定义如下:
drivers/spi/spidev.c
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
/* REVISIT switch to aio primitives, so that userspace
* gets more complete API coverage. It'll simplify things
* too, except for the locking.
*/
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl,
.compat_ioctl = spidev_compat_ioctl,
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};
2.1、spidev_open
spidev_open接口主要用于判断所要打开的spi通用字符设备文件,并根据字符设备文件的设备号在device_list链表上查找对应的spidev_data类型的变量,并将其绑定至文件描述的私有变量指针上。(当进行通用字符设备文件节点的创建前,通过注册spidevice并与spidev_spi_driver绑定时,通过调用spidev_probe时,将该spidevice对应的spidev_data类型的变量添加到device_list链表上,同时通过调用device_create接口完成device类型变量的创建,同时向应用层发送uevent,由应用层的udev或mdev完成字符设备节点的创建(通过mknod系统调用))。
如下是struct spidev_data类型的变量,该变量实现了spi通用字符设备节点对应的文件描述符与spi模块的关联:
- 通过spi_device类型的变量,完成了与spi device的关联,从而也完成了与对应spi master的绑定;
- dev_t类型的变量说明了该spi通用字符设备节点的设备号;
- buffer为进行spi通信的buffer。
drivers/spi/spidev.c
struct spidev_data {
dev_t devt;
struct mutex spi_lock;
struct spi_device *spi;
struct list_head device_entry;
/* TX/RX buffers are NULL unless this device is open (users > 0) */
struct mutex buf_lock;
unsigned users;
u8 *tx_buffer;
u8 *rx_buffer;
u32 speed_hz;
};
2.2、spidev_read、spidev_write
这两个接口主要通过调用spi通信接口spi_async,完成与具体的spidevice的通信(同步通信)。当spidev_read、spidev_write接口调用spi_async时,借助完成量接口,完成了同步通信(调用wait_for_completion使本进程进入sleep状态,待spi-core完成通信后,则通过执行spidev_complete将该进程唤醒,从而完成了同步通信操作)。
drivers/spi/spidev.c
/* Read-only message with current device setup */
static ssize_t
spidev_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status;
/* chipselect only toggles at start or end of operation */
if (count > bufsiz)
return -EMSGSIZE;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
status = spidev_sync_read(spidev, count);
if (status > 0) {
unsigned long missing;
missing = copy_to_user(buf, spidev->rx_buffer, status);
if (missing == status)
status = -EFAULT;
else
status = status - missing;
}
mutex_unlock(&spidev->buf_lock);
return status;
}
/* Write-only message with current device setup */
static ssize_t
spidev_write(struct file *filp, const char __user *buf,
size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status;
unsigned long missing;
/* chipselect only toggles at start or end of operation */
if (count > bufsiz)
return -EMSGSIZE;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
missing = copy_from_user(spidev->tx_buffer, buf, count);
if (missing == 0)
status = spidev_sync_write(spidev, count);
else
status = -EFAULT;
mutex_unlock(&spidev->buf_lock);
return status;
}
2.3、spidev_ioctl、spidev_compat_ioctl
这两个接口主要进行通信速率、通信模式等设置操作,包括SPI_IOC_WR_MODE、SPI_IOC_WR_LSB_FIRST、SPI_IOC_WR_BITS_PER_WORD、SPI_IOC_WR_MAX_SPEED_HZ等接口,也支持与spi device的读写通信等。
drivers/spi/spidev.c
static long
spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int retval = 0;
struct spidev_data *spidev;
struct spi_device *spi;
u32 tmp;
unsigned n_ioc;
struct spi_ioc_transfer *ioc;
/* Check type and command number */
if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC)
return -ENOTTY;
/* guard against device removal before, or while,
* we issue this ioctl.
*/
spidev = filp->private_data;
mutex_lock(&spidev->spi_lock);
spi = spi_dev_get(spidev->spi);
if (spi == NULL) {
mutex_unlock(&spidev->spi_lock);
return -ESHUTDOWN;
}
/* use the buffer lock here for triple duty:
* - prevent I/O (from us) so calling spi_setup() is safe;
* - prevent concurrent SPI_IOC_WR_* from morphing
* data fields while SPI_IOC_RD_* reads them;
* - SPI_IOC_MESSAGE needs the buffer locked "normally".
*/
mutex_lock(&spidev->buf_lock);
switch (cmd) {
/* read requests */
case SPI_IOC_RD_MODE:
case SPI_IOC_RD_MODE32:
tmp = spi->mode;
{
struct spi_controller *ctlr = spi->controller;
if (ctlr->use_gpio_descriptors && ctlr->cs_gpiods &&
ctlr->cs_gpiods[spi_get_chipselect(spi, 0)])
tmp &= ~SPI_CS_HIGH;
}
if (cmd == SPI_IOC_RD_MODE)
retval = put_user(tmp & SPI_MODE_MASK,
(__u8 __user *)arg);
else
retval = put_user(tmp & SPI_MODE_MASK,
(__u32 __user *)arg);
break;
case SPI_IOC_RD_LSB_FIRST:
retval = put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_BITS_PER_WORD:
retval = put_user(spi->bits_per_word, (__u8 __user *)arg);
break;
case SPI_IOC_RD_MAX_SPEED_HZ:
retval = put_user(spidev->speed_hz, (__u32 __user *)arg);
break;
/* write requests */
case SPI_IOC_WR_MODE:
case SPI_IOC_WR_MODE32:
if (cmd == SPI_IOC_WR_MODE)
retval = get_user(tmp, (u8 __user *)arg);
else
retval = get_user(tmp, (u32 __user *)arg);
if (retval == 0) {
struct spi_controller *ctlr = spi->controller;
u32 save = spi->mode;
if (tmp & ~SPI_MODE_MASK) {
retval = -EINVAL;
break;
}
if (ctlr->use_gpio_descriptors && ctlr->cs_gpiods &&
ctlr->cs_gpiods[spi_get_chipselect(spi, 0)])
tmp |= SPI_CS_HIGH;
tmp |= spi->mode & ~SPI_MODE_MASK;
spi->mode = tmp & SPI_MODE_USER_MASK;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "spi mode %x\n", tmp);
}
break;
case SPI_IOC_WR_LSB_FIRST:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp)
spi->mode |= SPI_LSB_FIRST;
else
spi->mode &= ~SPI_LSB_FIRST;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "%csb first\n",
tmp ? 'l' : 'm');
}
break;
case SPI_IOC_WR_BITS_PER_WORD:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u8 save = spi->bits_per_word;
spi->bits_per_word = tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->bits_per_word = save;
else
dev_dbg(&spi->dev, "%d bits per word\n", tmp);
}
break;
case SPI_IOC_WR_MAX_SPEED_HZ: {
u32 save;
retval = get_user(tmp, (__u32 __user *)arg);
if (retval)
break;
if (tmp == 0) {
retval = -EINVAL;
break;
}
save = spi->max_speed_hz;
spi->max_speed_hz = tmp;
retval = spi_setup(spi);
if (retval == 0) {
spidev->speed_hz = tmp;
dev_dbg(&spi->dev, "%d Hz (max)\n", spidev->speed_hz);
}
spi->max_speed_hz = save;
break;
}
default:
/* segmented and/or full-duplex I/O request */
/* Check message and copy into scratch area */
ioc = spidev_get_ioc_message(cmd,
(struct spi_ioc_transfer __user *)arg, &n_ioc);
if (IS_ERR(ioc)) {
retval = PTR_ERR(ioc);
break;
}
if (!ioc)
break; /* n_ioc is also 0 */
/* translate to spi_message, execute */
retval = spidev_message(spidev, ioc, n_ioc);
kfree(ioc);
break;
}
mutex_unlock(&spidev->buf_lock);
spi_dev_put(spi);
mutex_unlock(&spidev->spi_lock);
return retval;
}
static long
spidev_compat_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
if (_IOC_TYPE(cmd) == SPI_IOC_MAGIC
&& _IOC_NR(cmd) == _IOC_NR(SPI_IOC_MESSAGE(0))
&& _IOC_DIR(cmd) == _IOC_WRITE)
return spidev_compat_ioc_message(filp, cmd, arg);
return spidev_ioctl(filp, cmd, (unsigned long)compat_ptr(arg));
}
三、实例分析
1. SPI 通用字符设备实例概述
SPI 通用字符设备驱动通过字符设备接口将 SPI 设备暴露给用户空间应用。用户可以通过 open, read, write, ioctl 等标准文件操作与 SPI 外设进行交互。下面通过一个 SPI 通用字符设备驱动的实例来详细分析其工作原理。
2. 驱动代码分析
以下是一个简化的 SPI 通用字符设备驱动实例:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/spi/spi.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#define DEVICE_NAME "spi_device"
#define SPI_BUS 0 // SPI 总线编号
#define SPI_CS 0 // SPI 设备片选
static dev_t dev_num;
static struct cdev spi_cdev;
static struct class *spi_class;
static struct spi_device *spi_dev;
// SPI 设备的缓冲区
static char spi_buffer[128];
// 设备文件操作结构
static struct file_operations spi_fops = {
.owner = THIS_MODULE,
.open = spi_open,
.read = spi_read,
.write = spi_write,
.unlocked_ioctl = spi_ioctl,
};
// 打开 SPI 设备
static int spi_open(struct inode *inode, struct file *file)
{
pr_info("SPI device opened\n");
return 0;
}
// 读取数据
static ssize_t spi_read(struct file *file, char __user *buf, size_t count, loff_t *offset)
{
int ret;
struct spi_transfer t = {
.tx_buf = NULL,
.rx_buf = spi_buffer,
.len = count,
};
struct spi_message msg;
spi_message_init(&msg);
spi_message_add_tail(&t, &msg);
ret = spi_sync(spi_dev, &msg);
if (ret < 0) {
pr_err("SPI read failed\n");
return ret;
}
// 将读取的数据从内核缓冲区复制到用户空间
if (copy_to_user(buf, spi_buffer, count)) {
return -EFAULT;
}
return count;
}
// 写入数据
static ssize_t spi_write(struct file *file, const char __user *buf, size_t count, loff_t *offset)
{
int ret;
struct spi_transfer t = {
.tx_buf = spi_buffer,
.rx_buf = NULL,
.len = count,
};
struct spi_message msg;
if (copy_from_user(spi_buffer, buf, count)) {
return -EFAULT;
}
spi_message_init(&msg);
spi_message_add_tail(&t, &msg);
ret = spi_sync(spi_dev, &msg);
if (ret < 0) {
pr_err("SPI write failed\n");
return ret;
}
return count;
}
// 控制命令(用于扩展SPI设备的特性)
static long spi_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
// 这里可以处理 IOCTL 操作,根据需要定义控制命令
return 0;
}
// 初始化 SPI 设备
static int spi_probe(struct spi_device *spi)
{
int ret;
spi_dev = spi; // 记录 SPI 设备
// 注册字符设备
ret = alloc_chrdev_region(&dev_num, 0, 1, DEVICE_NAME);
if (ret < 0) {
pr_err("Failed to allocate character device region\n");
return ret;
}
// 创建字符设备
spi_class = class_create(THIS_MODULE, DEVICE_NAME);
if (IS_ERR(spi_class)) {
unregister_chrdev_region(dev_num, 1);
pr_err("Failed to create class\n");
return PTR_ERR(spi_class);
}
device_create(spi_class, NULL, dev_num, NULL, DEVICE_NAME);
cdev_init(&spi_cdev, &spi_fops);
ret = cdev_add(&spi_cdev, dev_num, 1);
if (ret < 0) {
class_destroy(spi_class);
unregister_chrdev_region(dev_num, 1);
pr_err("Failed to add cdev\n");
return ret;
}
pr_info("SPI device registered\n");
return 0;
}
// SPI 设备移除
static int spi_remove(struct spi_device *spi)
{
device_destroy(spi_class, dev_num);
class_destroy(spi_class);
cdev_del(&spi_cdev);
unregister_chrdev_region(dev_num, 1);
pr_info("SPI device removed\n");
return 0;
}
// SPI 驱动结构体
static struct spi_driver spi_drv = {
.driver = {
.name = "spi_generic",
.owner = THIS_MODULE,
},
.probe = spi_probe,
.remove = spi_remove,
};
module_spi_driver(spi_drv);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("SPI Generic Character Device Driver");
3. 关键部分分析
a. 字符设备创建与注册
ret = alloc_chrdev_region(&dev_num, 0, 1, DEVICE_NAME);
alloc_chrdev_region:分配一个字符设备编号(dev_num),DEVICE_NAME是设备的名称,0是从哪个编号开始分配,1表示仅分配一个设备号。
spi_class = class_create(THIS_MODULE, DEVICE_NAME);
device_create(spi_class, NULL, dev_num, NULL, DEVICE_NAME);
class_create:创建一个设备类,用于管理和显示设备。device_create:根据设备类和设备编号创建一个设备文件,这样用户就可以通过/dev/spi_device与 SPI 设备交互。
cdev_init(&spi_cdev, &spi_fops);
ret = cdev_add(&spi_cdev, dev_num, 1);
cdev_init:初始化cdev结构体,这个结构体描述了一个字符设备的文件操作方法。cdev_add:将字符设备添加到系统中,使得系统可以识别并处理与之相关的文件操作。
b. SPI 数据传输
struct spi_transfer t = {
.tx_buf = NULL, // 读取操作时,没有数据需要发送
.rx_buf = spi_buffer, // 数据读取到这个缓冲区
.len = count, // 读取的字节数
};
struct spi_message msg;
spi_message_init(&msg);
spi_message_add_tail(&t, &msg);
spi_transfer:描述一次 SPI 数据传输,包括发送和接收缓冲区、传输长度等。spi_message:多个spi_transfer组成一个传输消息,spi_message_init初始化消息结构,spi_message_add_tail将传输添加到消息队列。
ret = spi_sync(spi_dev, &msg);
spi_sync:执行同步 SPI 传输,阻塞直到数据传输完成。
c. 设备文件操作
spi_open:每次用户打开设备文件时会调用此函数。在此实现中,仅进行日志打印。spi_read:读取数据时,通过spi_sync函数从 SPI 外设读取数据并将其传输到用户空间。spi_write:写入数据时,将数据从用户空间复制到内核缓冲区,并通过spi_sync函数将数据发送到 SPI 外设。spi_ioctl:提供一个接口,用于实现控制命令和特性扩展,通常可以用于设置 SPI 参数或控制特定操作。
d. SPI 设备的初始化与移除
static int spi_probe(struct spi_device *spi)
spi_probe:当 SPI 设备绑定到 SPI 总线时,会调用此函数来初始化设备,并注册字符设备。spi_remove:当 SPI 设备从系统中移除时,销毁字符设备、设备文件和相关资源。

















 2866
2866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









