




最近在使用mmyolo跑一些实验。
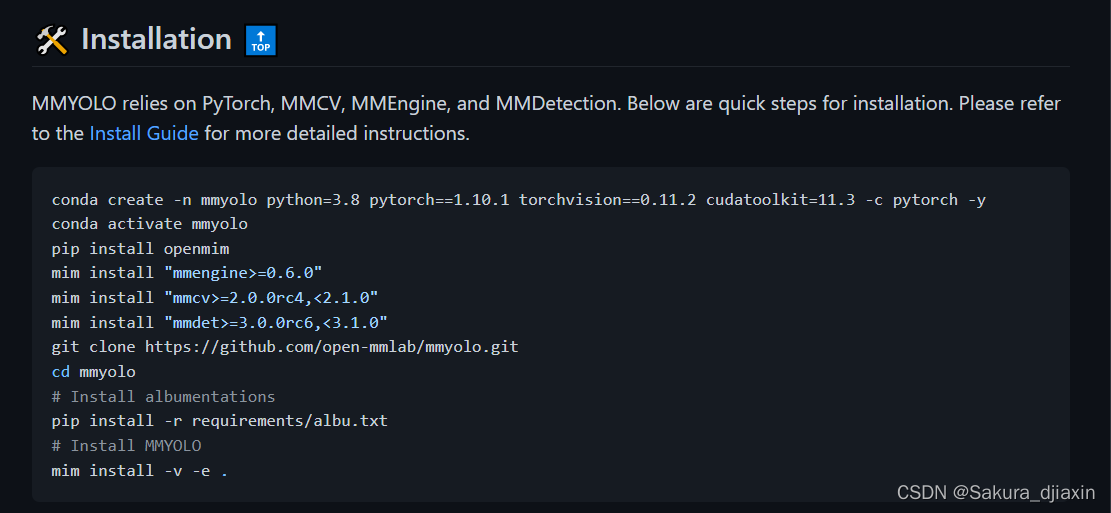
1、环境安装,就按照官网的安装步骤来就可以了 。
https://github.com/open-mmlab/mmyolo
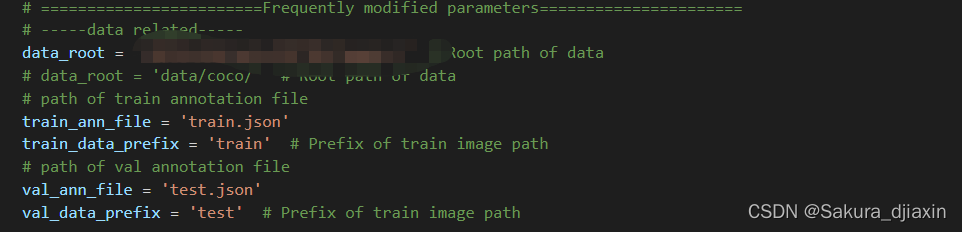
2、数据集,如果是在配置文件里面。将数据集路径加载为自己存放的路径,ps:这里使用的coco格式。
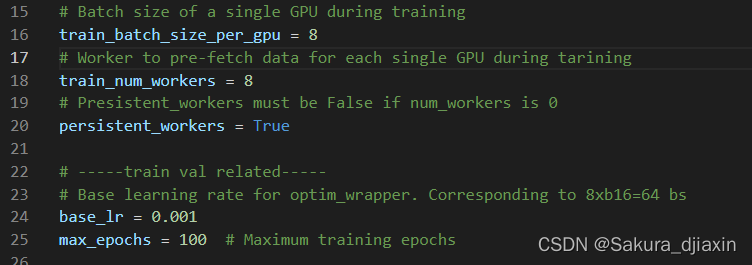
3、训练参数:
4、开始训练,mmyolo的训练方法和mmdetection差不多。

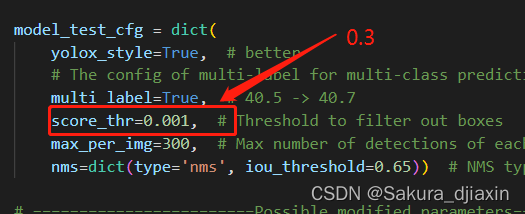
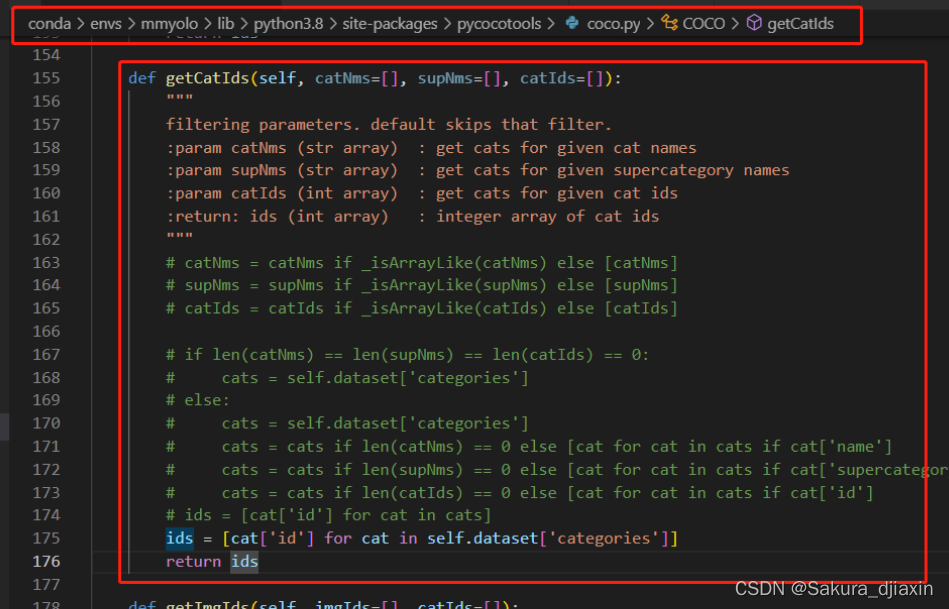
5、我的类别数量比较少,导致报错:IndexError:list index out of range.

修改方案:
1、增大阈值
2、修改cocoapi
mmyolo训练记录
最新推荐文章于 2025-01-22 16:15:47 发布
 文章介绍了如何使用mmyolo进行实验,包括按照官方安装步骤配置环境,调整数据集路径以适应COCO格式,设置训练参数,以及遇到类别数量不足引发的‘IndexError’时,提出了增大阈值和修改cocoapi的解决方案。
文章介绍了如何使用mmyolo进行实验,包括按照官方安装步骤配置环境,调整数据集路径以适应COCO格式,设置训练参数,以及遇到类别数量不足引发的‘IndexError’时,提出了增大阈值和修改cocoapi的解决方案。
部署运行你感兴趣的模型镜像
您可能感兴趣的与本文相关的镜像

Yolo-v8.3
Yolo
YOLO(You Only Look Once)是一种流行的物体检测和图像分割模型,由华盛顿大学的Joseph Redmon 和Ali Farhadi 开发。 YOLO 于2015 年推出,因其高速和高精度而广受欢迎

















 1482
1482



 到【灌水乐园】发言
到【灌水乐园】发言








