






 本文深入探讨了Dinic算法解决最大流问题的方法,包括剩余图的概念、分层网络的构建以及最短路增广路径的算法思想。通过详细步骤解析,展示了算法如何在层次网络中找到增广路径并进行流量优化,最终达到无法再找出s-t路径时算法结束。Dinic算法的时间复杂度为O(mn^2),是Edmonds-Karp算法的优化版本。
本文深入探讨了Dinic算法解决最大流问题的方法,包括剩余图的概念、分层网络的构建以及最短路增广路径的算法思想。通过详细步骤解析,展示了算法如何在层次网络中找到增广路径并进行流量优化,最终达到无法再找出s-t路径时算法结束。Dinic算法的时间复杂度为O(mn^2),是Edmonds-Karp算法的优化版本。
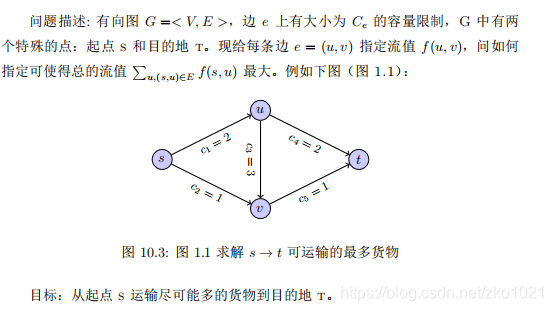
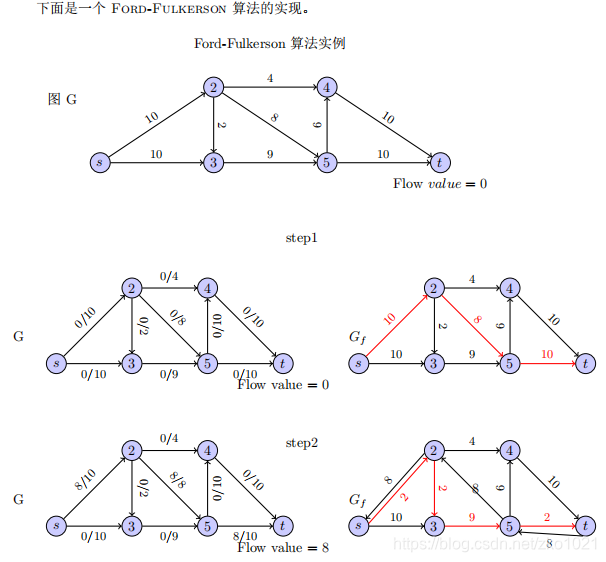
我们关注最大流问题,具体例子如下图:
重要定义:剩余图
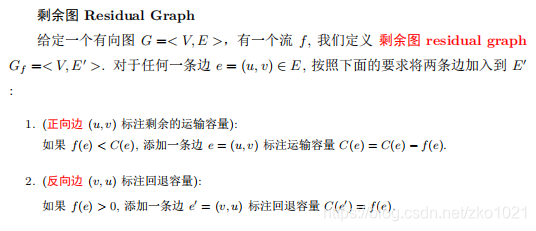
即,在剩余图中,u,v之间包含2条边:
反向边(v,u),容量为f(e);正向边(u,v),容量为C(e)-f(e)。
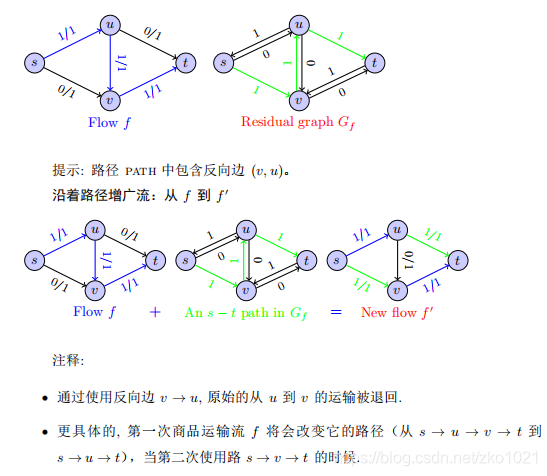
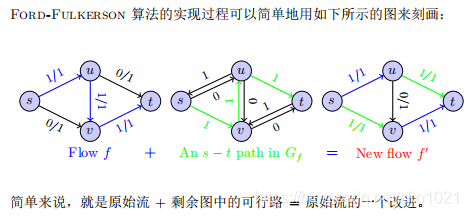
增加:可退回边

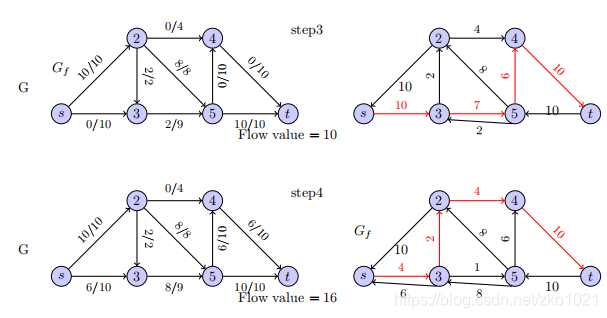
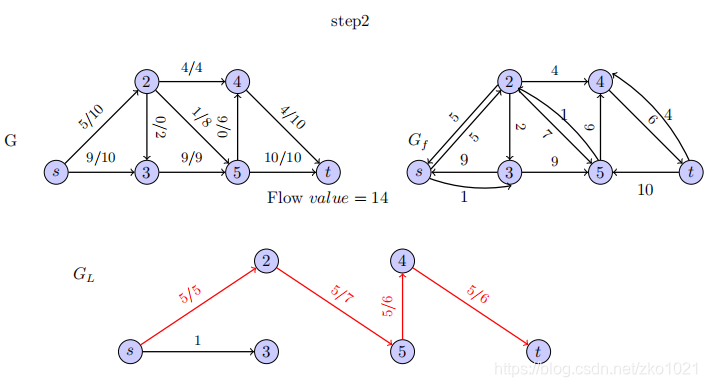
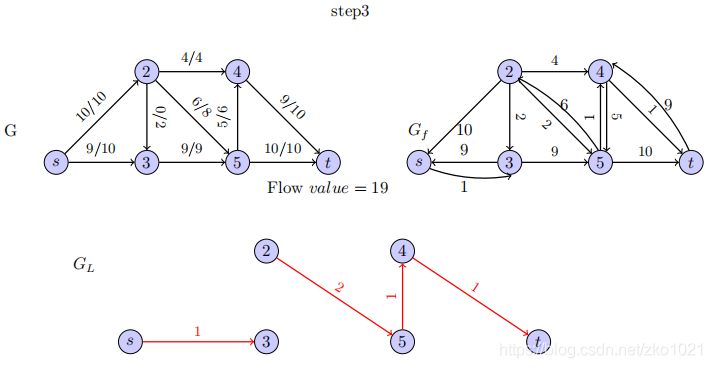
这里step3 的剩余图 5->4 应该是10,而不是6;
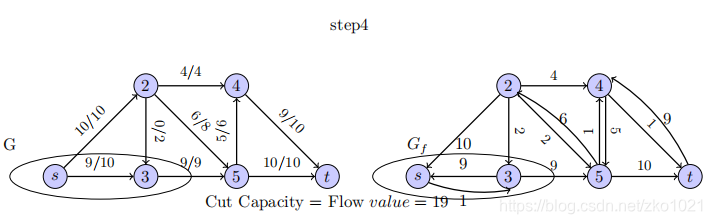
这样的话,step4的左图(即优化后的路径),s->3为7,后续依次类推。
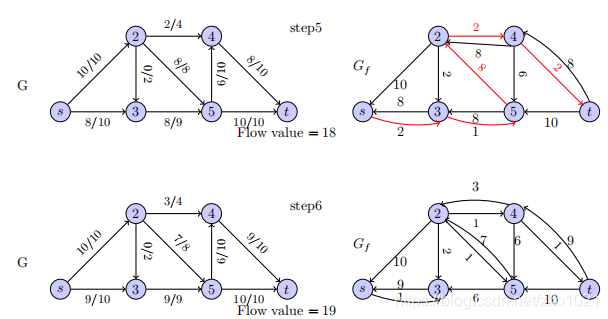
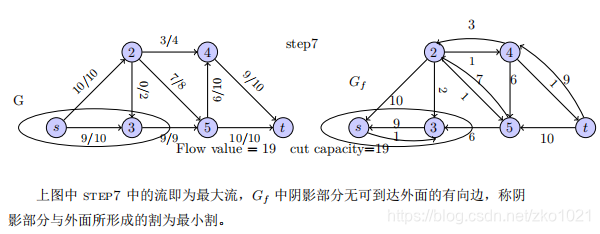
到最后一步,剩余图中再选不出s->t的路径的时候,就是算法停止的时候。
Dinic算法
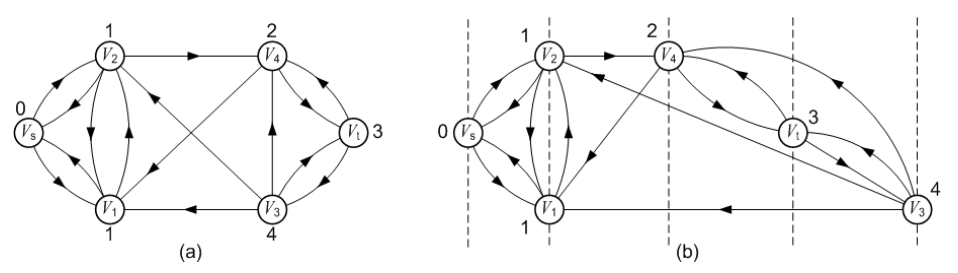
顶点的层次:在剩余图中,把从源点到顶点u的最短路径长度,称为顶点u的层次。源点(下图中的Vs)的层次为0。
下图就是一个分层的过程。
最短路增广路径的算法思想
每次在分层网络中找一条含弧数最少的增广路进行增广。
具体步骤如下:
(1)初始化容量网络和网络流。
(2)构造剩余图和分层网络,若汇点(t)不在分层网络中,则算法结束。
(3)在层次网络中不断用BFS增广,直到分层网络中没有增广路为止;每次增广完毕,在分层网络中要去掉因改进流量而导致饱和的弧。
(4)转步骤(2)。
Dinic其实是最短增广路算法的优化版。
对于Dinic算法,重点关注两个部分:
1. 阻塞流:用O(m)的时间构造分层网络GL,每得到一个GL,不断进行增广,直到没有路径。
2. 用DFS搜索增广路径。
算法实现
Initialize f(e) = 0 for all e.
while TRUE do
Construct layered network GL from residual graph Gf ;
if dist(s, t) = ∞ then
break;
end if
find a blocking flow f′ in GL using DF S technique;
augment flow f by f′;
end while
return f;
阻塞流代表在 GL 网络中经过该流的增广,不再存在 s − t 的路径。
在使用 O(m) 时间得到一个分层网络后,EDMONDS-KAPR 每次只增广一条路径(效率较低)。
算法实例
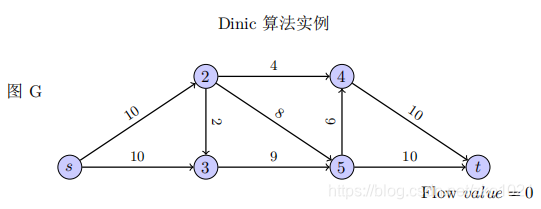
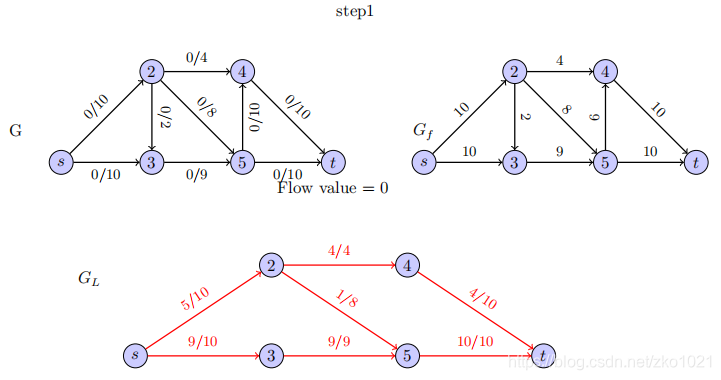
初始网络流;剩余图;
分层网络GL:去掉饱和边 -> 找到一条s-t的最短路径。
此时,找不到s-t的完整路径,算法停止。
算法分析
总的时间复杂度为 O(mn2)
• 构造分层网络:O(m)(扩展的 BFS)
• 寻找阻塞流:O(mn)。其中,
1) 用 DFS 在分层网络中寻找一条 s − t 路径需要 O(n) 时间。
2) 每条路径至少饱和一个 bottleneck 边。因此,寻找一条阻塞流至多需要 m 次迭代。
• #while = O(n)(与 EDMOND-KARP 增广过程分析相同)
因此总的时间复杂度为 O(mn2)


















 2010
2010

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









