







 在单独使用视觉或IMU数据时,绝对速度无法准确测量。然而,将两者结合,利用视觉观察到的距离比例和IMU提供的加速度信息,可以解决这一问题。速度的计算需要至少三帧图像,视觉提供相对距离,IMU则给出加速度对应的绝对移动距离。通过整合这些信息,滤波器能够估算出精确的速度。
在单独使用视觉或IMU数据时,绝对速度无法准确测量。然而,将两者结合,利用视觉观察到的距离比例和IMU提供的加速度信息,可以解决这一问题。速度的计算需要至少三帧图像,视觉提供相对距离,IMU则给出加速度对应的绝对移动距离。通过整合这些信息,滤波器能够估算出精确的速度。
只有视觉或者只有IMU的数据的时候,绝对的速度都是一个不可观测量,但神奇的是,如果把两者结合在一起,绝对速度就变成可观测的了。原理可以大概这么解释:
假设imu观察到一个加速度,那么在加速之前和加速之后的量帧之间的移动距离的比例和绝对速度有关。
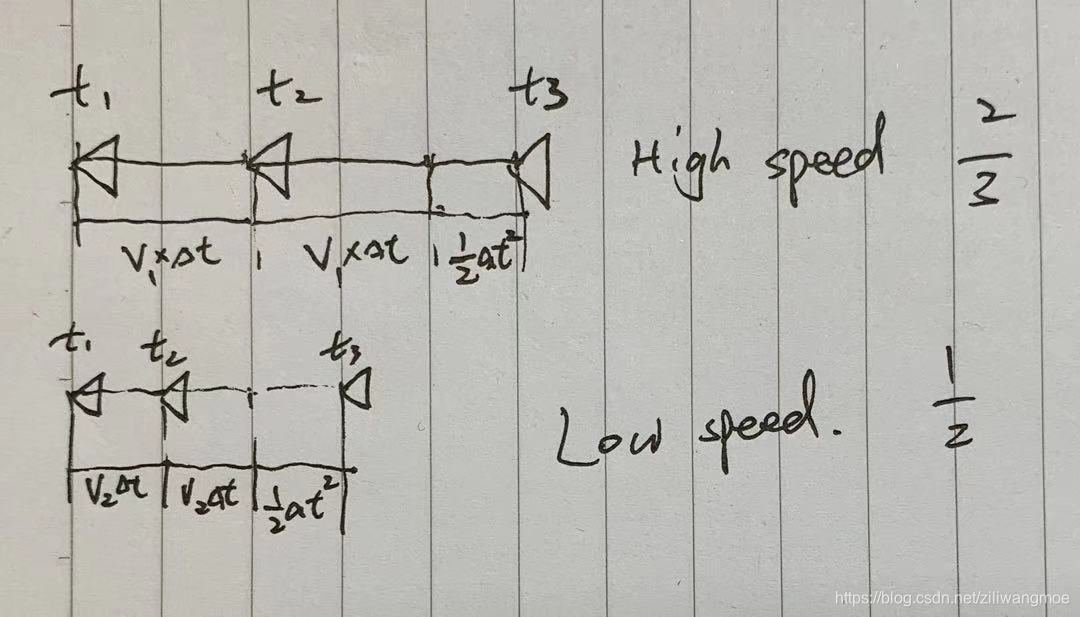
速度需要至少三帧图像才能被观测。视觉能直接观察到三帧之间距离的比例,但是不知道距离的绝对距离。IMU能够知道加速度带来的那一段距离的绝对值。所以通过这两个方程,能够把速度解出来。
在滤波器中,假设目前状态中的速度大于真实的数度。当imu观察到一个减速度,因为速度比真实值大,所以通过imu预测的下一个时刻的位置会比图像观察到到的下一个值变化小。所以会把位置强烈的向后拉。这个现象在vio直线匀速运动长距离后,在90度转弯的时候就会出现。因为这个时候,行驶方向的速度变为零了。

















 1003
1003

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









