







IMU技术的出现弥补了GPS定位的不足,两者相辅相成,可以让自动驾驶汽车获得最准确的定位信息。
IMU全称inertial measurement unit,即惯性测量单元,它由三个单轴的加速度计和三个单轴的陀螺仪组成,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号,对这些信号进行处理之后,便可解算出物体的姿态。
值得注意的是,IMU提供的是一个相对的定位信息,它的作用是测量相对于起点物体所运动的路线,所以它并不能提供你所在的具体位置的信息,因此,它常常和GPS一起使用,当在某些GPS信号微弱的地方时,IMU就可以发挥它的作用,可以让汽车继续获得绝对位置的信息,不至于“迷路”。
其实别看IMU这个技术看上去比较陌生,其实我们每天使用的手机,出行会用到的汽车、飞机,甚至导弹、宇宙飞船都会使用到IMU,区别在于成本和精度。
根据不同的使用场景,对IMU的精度有不同的要求,精度高,也意味着成本高。
IMU的精度、价格和使用场景,如下图所示:
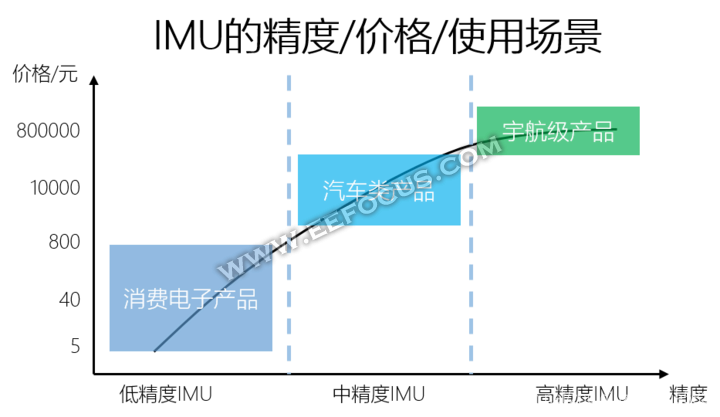
低精度IMU:应用在普通的消费级电子产品中,这种低精度的IMU十分廉价,普遍应用于手机、运动手表中,常用于记录行走的步数。
中精度IMU:应用于无人驾驶中,价格从几百块到几万块不等,取决于此无人驾驶汽车对定位精度的要求。
高精度IMU:应用于导弹或航天飞机。就以导弹为例,从导弹发射到击中目标,宇航级的IMU可以达到极高精度的推算,误差甚至可以小于一米。
除了精度和成本的特性外,IMU还有两个十分关键的特性,第一是更新频率高,工作频率可以达到100Hz以上;第二是短时间内的推算精度高,不会有太大的误差。
为了让IMU获得更高的精度,在三个加速度计和三个陀螺仪的基础上,很多厂商还会添加磁力计,为了提高可靠性,有的还会增加传感器的数量。
下面我们就一起来看看一些常见的IMU芯片厂商,以及他们的IMU有哪些特点:
ADI
ADI公司的MEMS IMU传感器以多轴方式组合精密陀螺仪、加速度计、磁力计和压力传感器。ADI可以可靠地检测并处理多个自由度(DoF) 即便是极为复杂的应用和动态环境下。 这些即插即用型解决方案包括完整的出厂校准、嵌入式补偿和传感器处理以及简单的可编程接口。
博世的IMU模块主要应用于无人机和机器人,以及一些消费类的产品中。博世将两个3轴MEMS传感器集成到一个封装中,IMU中的加速度传感器和陀螺仪的组合可以满足高级消费电子应用的需求,例如智能手机中的游戏控制台或游戏应用。
与分立式MEMS产品相比,ST的IMU集成了互补型传感器,可提供更紧凑,坚固且易于组装的解决方案。系ST的统级封装(SiP)将加速度计,陀螺仪和磁力计结合在一个单片6轴或9轴解决方案中。多个传感器输出的集成使运动传感系统达到最苛刻应用所需的精度水平,例如增强的手势识别,游戏,增强现实,室内导航和基于本地化的服务。
深迪半导体是国内少数几家能将三轴陀螺仪和三轴加速度计集成到一个芯片中的厂商,深迪的IMU具有体积小、功耗低的特点,适用于消费电子市场,如稳定平台、车联网、机器人等。
小结
IMU的应用非常广泛,但是在国内能做IMU芯片的仅有几家公司,未来的自动驾驶对传感器也提出了更高精度的要求,但是更高的精度意味着更高的成本,如果能提出一种高精度、低成本和高可靠性的IMU解决方案,便能占领技术制高点打破技术壁垒,从而赢得先机。

















 1047
1047

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









