







 本文深入介绍了Roberson图在基4SRT算法中的应用,详细阐述了如何通过Roberson图表示除法公式,并探讨了商集冗余因子与收敛条件。同时,解释了Overlap的概念,即在选择商值时重合的区域,该区域对于算法的正确选择至关重要。通过分析冗余因子和被除数的关系,确定了部分和与商值的选取范围。
本文深入介绍了Roberson图在基4SRT算法中的应用,详细阐述了如何通过Roberson图表示除法公式,并探讨了商集冗余因子与收敛条件。同时,解释了Overlap的概念,即在选择商值时重合的区域,该区域对于算法的正确选择至关重要。通过分析冗余因子和被除数的关系,确定了部分和与商值的选取范围。
目录
本文是介绍基4 SRT算法前的第二篇补充文章《Roberson图与overlap》。
一、Roberson图
J.E.Robertson是SRT算法中的“R”,Roberson图是其在最先发表的论文中描述以下公式的表示方法图:

其中,
wj+1为下个部分和;
r为基;
wj为当前部分和;
d为除数;
qj+1为某次迭代产生的商数;
具体公式可参考之前文章:《除法器(3)——基2 SRT算法》
假设rw(j)=x,w(j+1)=y,重写上式:
y = x – d*q
当q=0, y = x
当q=1, y = x – d
当q=2, y = x – 2d
…
我们可以根据不同的q值描绘出很多个y和x关系的直线,比如下图:
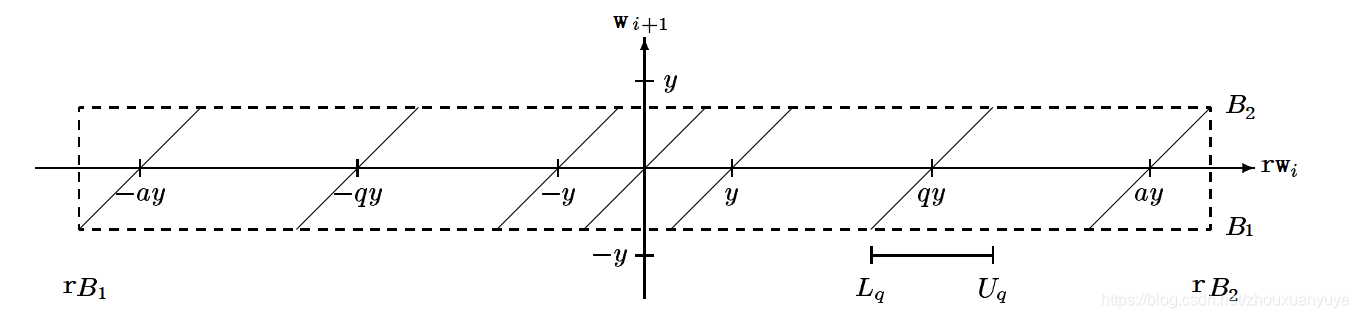
Roberson图
商q从数字集{-a,-a+1,…,-1,0,1,…,a-1,a}中一一取值,画出所有曲线描述如上,即是Roberson图。
上期提到,对于基r,以下商集:

商集的冗余因子为:

对于QDS函数,其目的在于选择出商值q,而其收敛的条件为:

则:
![]()
根据上图中可以看出:
其中q属于商集{-a,…,a}。
对于q的a和-a时:
又因为从上图中可以看出,
联立(8)、(9)、(10)、(11)式可得:
所以:
对于任意的wj,为保证其至少有一个商值可以选择,则必须满足:

所以:

我们在式(4)、(5)中限制了部分和的收敛条件,在式(14)、(15)中得出了商q的部分和乘基的选择范围。
二、Overlap
此处的overlap即是重合的区域。
我们来看对于q-1的选择。
对于q:
y = x – d*q
对于q-1
y = x – d*(q-1)
分别将以上两条曲线在Roberson图中画出,可以看出
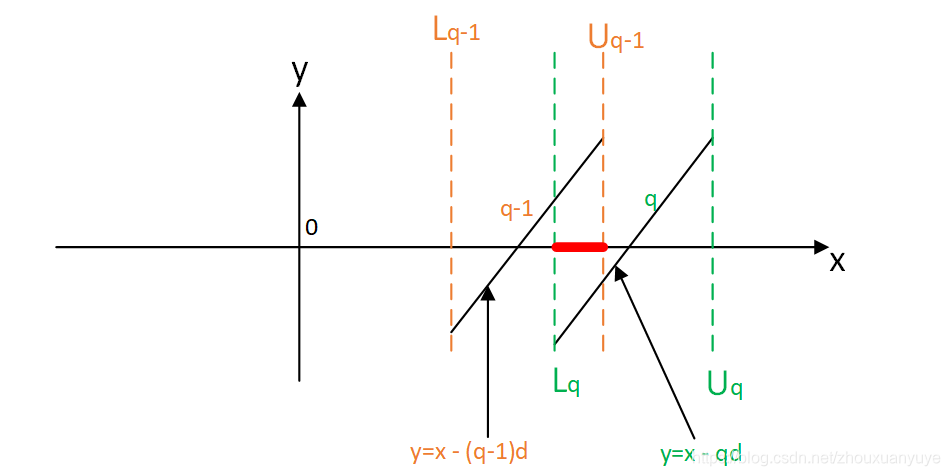
从上图可以看出:
当x在橘色区域时,商的值可选为q-1;
当x在绿色区域时,商的值可选为q;
当x为加粗红色线段时,向y轴正方向,可选商值为q-1;也可向x轴负方向,可选商值为q,而这段区域即为重合区域。
式(17)说明了重合区域的大小取决于冗余因子和被除数的大小,重合区域对于P-D图至关重要,我们下期再介绍。
谢谢您的阅读!
更新不易,如果对您有帮助,记得点赞关注哦。欢迎批评指正,谢谢鼓励!
一起“纸上谈芯”,共同学习:


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









