







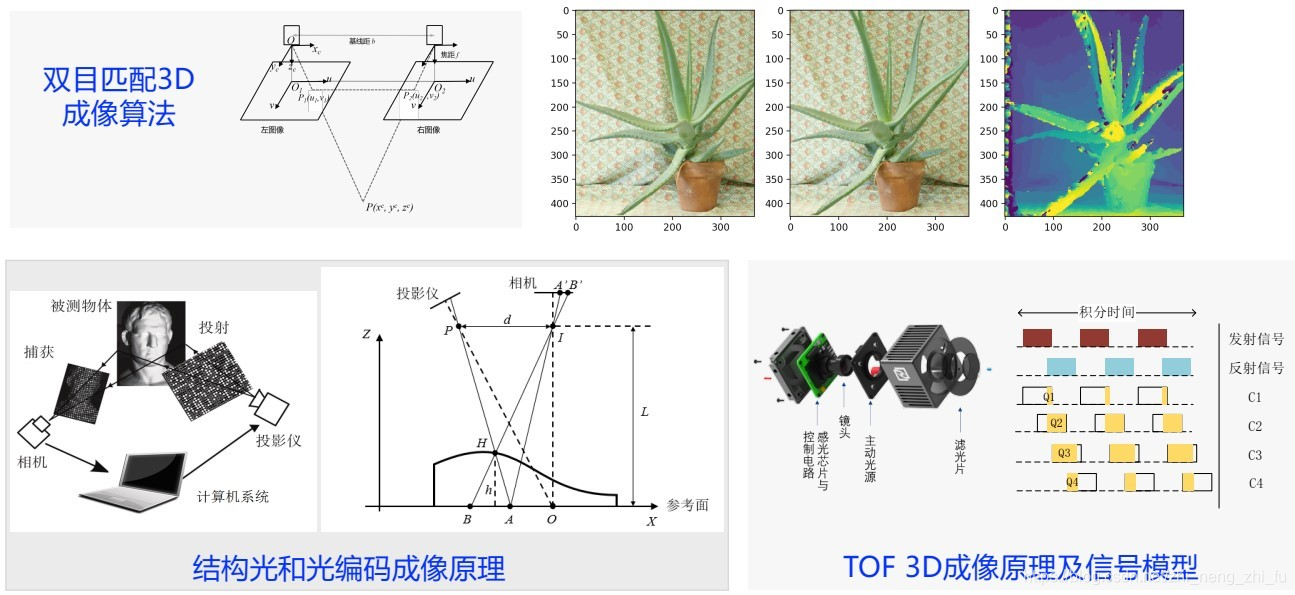
 本文介绍了3D数据获取的三种主要方式:双目匹配成像,结构光(点、线、面结构光)与光编码成像,以及TOF 3D成像。双目匹配成像依赖于图像匹配,结构光通过三角测量原理确定距离,而TOF技术则通过测量光的相位差来获取深度信息。
本文介绍了3D数据获取的三种主要方式:双目匹配成像,结构光(点、线、面结构光)与光编码成像,以及TOF 3D成像。双目匹配成像依赖于图像匹配,结构光通过三角测量原理确定距离,而TOF技术则通过测量光的相位差来获取深度信息。
3D数据获取方式
获取3D数据的方式主要分为 3 3 3大类:
- 双目匹配成像方式;
- 结构光与光编码成像方式;
- TOF 3D成像方式;
如下图所示:
双目匹配成像方式
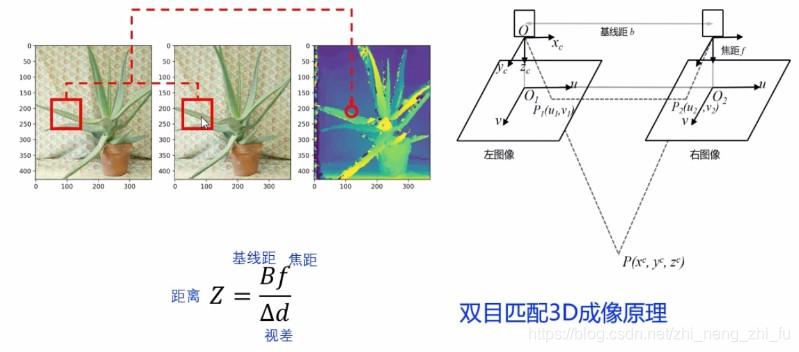
- 原理:左右两个相机拍摄同一区域获取两幅图片,对图片中相同位置的像素进行匹配,由该像素在不同相机里的差值可以计算出该像素对应的物理位置与相机基线的距离。
- 难点: 左右两幅图像的匹配比较困难;如果目标没有纹理信息,则无法识别。例如,如果对着白墙拍照,则无法获取墙面的距离。
结构光与光编码成像方式
结构光与光编码成像方式主要有4种:
- 点结构光;
- 线结构光;
- 多线结构光;
- 面结构光;
点结构光与线结构光
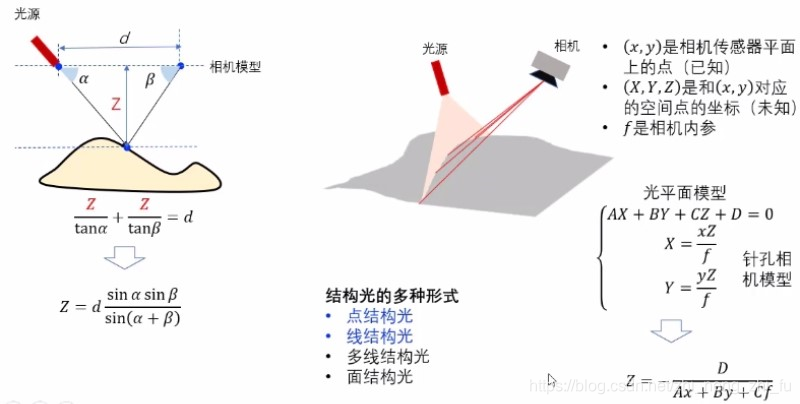
- 点结构光测距原理:已知光源的入射角度,相机的接收角度和光源到相机的距离,由三角公式可以求出目标点到基线的距离。
线结构光测距原理:不是很明白。
光编码成像原理(面结构光)

光编码成像原理: 组件由相机和投影仪组成,投影仪投影一个面,接收相机通过团编码识别出是投影仪哪个角度的“射线”,并计算出距离。例如,微软的 Kinect。
光编码在双目成像中的作用: 在双目立体视觉中安装投影仪,利用投影在物体上的图案,帮助两个相机计算双目匹配。
TOF 3D成像方式
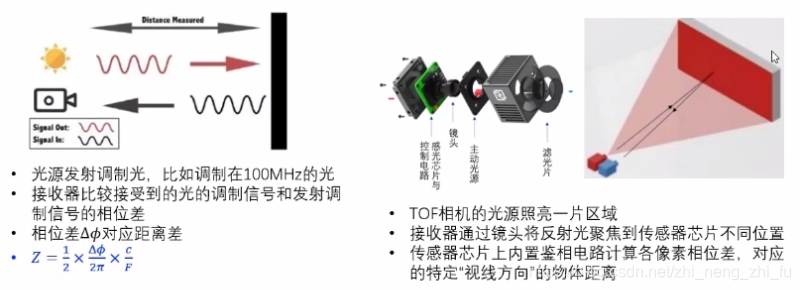
TOF 成像原理: 光源发射特制的调制光,接收器比较接受到的光的调制信号和发射调制信号的相位差,由相位差计算出对应的距离差,从而获得深度信息。
TOF 相机成像原理: TOF 相机是发射一面特殊的高频调试光信号,接收器通过镜头将反射光聚集到传感器芯片不同位置,传感器芯片上内置鉴相电路计算各个像素相位差,计算各个像素"视线"方向的物理距离。

















 985
985

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









