






 本文介绍如何连接Velodyne激光雷达至电脑并通过ROS记录数据。具体步骤包括配置网络、启动Velodyne节点、录制ROS话题数据为bag文件、编译pcl_ros源码以及将bag文件转换为pcd格式。
本文介绍如何连接Velodyne激光雷达至电脑并通过ROS记录数据。具体步骤包括配置网络、启动Velodyne节点、录制ROS话题数据为bag文件、编译pcl_ros源码以及将bag文件转换为pcd格式。
1.连接到激光雷达:
通过网线连接电脑和velodyne,然后在网络处选择建立的velodyne网络(上一篇)。

2.在ros下,运行velodyne
roslaunch velodyne_pointcloud VLP16_points.launch
3.将/velodyne_points的topic存入bag
rosbag record -O out /velodyne_points
4.在github上下载pcl_ros源码包,并编译
cd src
git clone https://github.com/ros-perception/perception_pcl.git
cd ..
catkin_make
5.使用该包相应功能,将bag转换成pcd文件
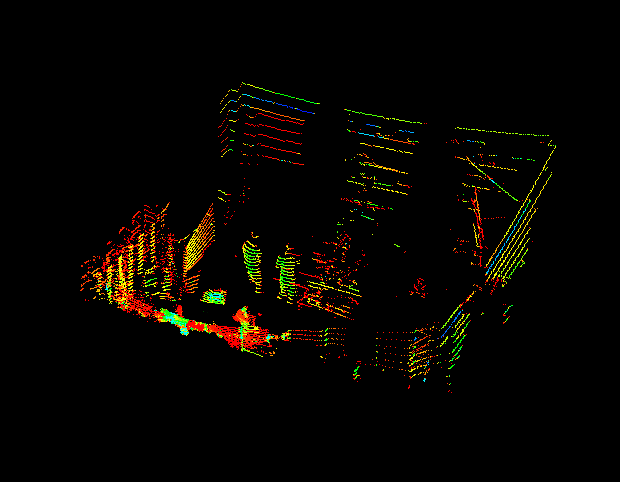
rosrun pcl_ros bag_to_pcd input.bag /velodyne_points pcd
显示相应的pcd图像,可以看到


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









