




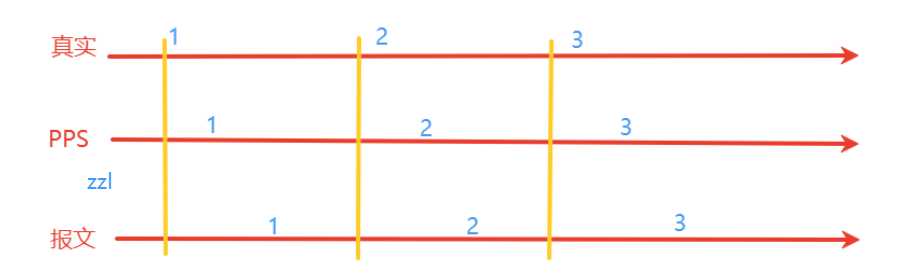
一、关于GPS报文和PPS先后
GPS模块中,这2个是同时产生的,但是由于串口处理电路等的延时,PPS会比GPS先到;
也就是说:
(1)GPS时间(你得到的时刻) = 真实时间 + 处理时间
(2)真实时间 - PPS时刻 < 真实时间 - GPS时间
二、如何获得高精度时间(10us级别)
伪代码:
time_t gps_time;
time_t real_time;
uint64_t real_us = 0;
void pps_callback(void)
{
//PPS秒脉冲中断
real_us = 0;
gps_time.sec += 1;
real_time = gps_time;
}
void tim_callback(uint64_t add_us)
{
//内部定时器中断
real_us += add_us;
}
void nvme_callback(char *str)
{
//报文中断
gps_time= decode_nvme(str);
}
这个方案的误差:
(1)秒级的误差 = GPS模块PPS误差 + 芯片外部中断误差 + 几个机器周期(几个运算步骤时间)
()微秒级的误差 = GPS模块PPS误差 + 芯片外部中断误差 + 1个定时器周期 + 内部定时器误差(累积误差,PPS发生时清0)
上述2个误差,应该都在几个us的级别



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









