 Windows11新添文件资源管理器键盘快捷键:提升操作效率
Windows11新添文件资源管理器键盘快捷键:提升操作效率




 Windows11引入了新的键盘快捷键,如调整文件资源管理器列宽的Ctrl+Shift+左右箭头,提供精确调整选项。这提高了文件管理和操作效率,用户可根据自身需求选择和学习这些新功能。
Windows11引入了新的键盘快捷键,如调整文件资源管理器列宽的Ctrl+Shift+左右箭头,提供精确调整选项。这提高了文件管理和操作效率,用户可根据自身需求选择和学习这些新功能。

在数字化时代,键盘快捷键已经成为了提高计算机操作效率的重要工具。尽管Windows操作系统已经发展得相当成熟,但微软仍然在不断推出新的快捷键,以满足用户日益增长的需求。最近,Windows 11就新增了几个实用的键盘快捷键,这些快捷键的引入旨在帮助用户更加高效地管理文件资源管理器中的文件和文件夹。
最近比较引人注目的新增功能当属调整文件资源管理器列宽的快捷键。通过Ctrl + Shift + 左箭头和Ctrl + Shift + 右箭头的组合,用户可以迅速减小或增加各列的显示宽度。这一功能的实用性不言而喻,尤其对于那些经常需要浏览和整理大量文件的用户来说,能够快速调整列宽将极大地提升操作体验。
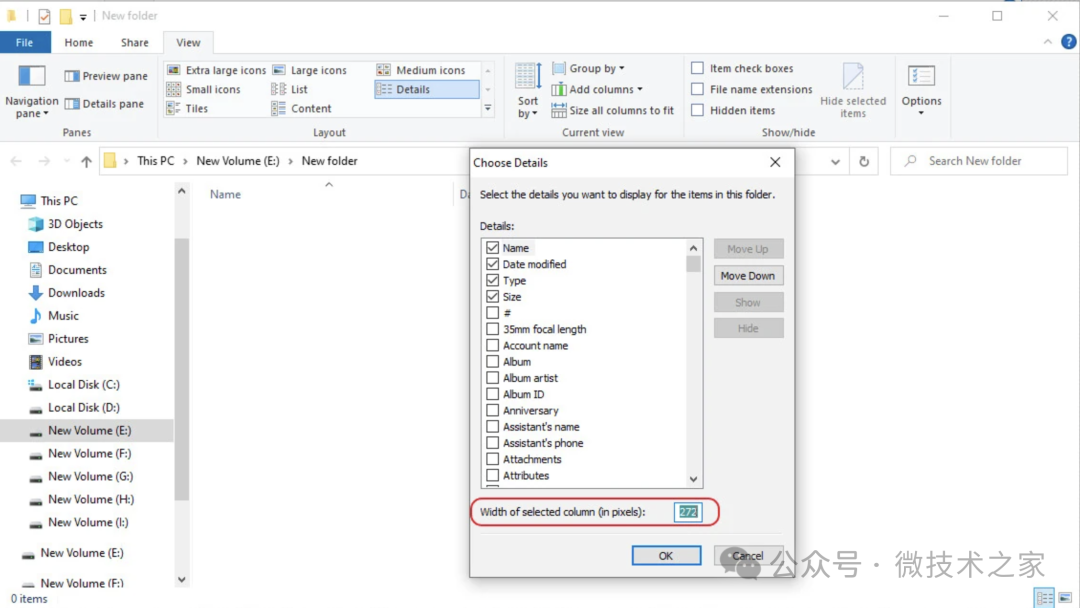
此外,我们还可以通过 Windows 资源管理器中的列设置打开“所选列的宽度(像素)”选项框,并输入精确的像素值 (px) 来实现精确调整。
在视图菜单中,选择详细信息,请单击,然后单击您要调整的列的名称。
在宽度 (以像素为单位) 的所选列框中,输入所需的大小,然后单击确定。
相较于传统的鼠标拖动调整方式,这些快捷键提供了更为精确和高效的操作手段。鼠标拖动虽然直观易用,但在需要精确调整列宽时,往往难以达到理想的效果。而键盘快捷键则能够实现更为细微的调整,让用户能够更加灵活地控制文件资源管理器的显示布局。
除了快捷键操作外,Windows 11还保留了传统的鼠标调整方式,并提供了更为丰富的列宽调整选项。用户可以通过鼠标指针将列标题边框按钮拖动到所需位置,实现手动扩展列的操作。同时,文件资源管理器的列设置还提供了输入具体像素值的功能,让用户能够精确控制列宽,满足不同场景下的需求。
这些新功能和快捷键的引入,无疑为Windows 11用户带来了更多的便利和选择。无论是专业办公人员还是普通用户,都可以通过学习和使用这些新功能,提高文件管理和操作效率,减少不必要的操作时间和成本。
每个人的使用习惯和场景都有所不同,因此,在选择使用哪些快捷键时,我们需要根据自己的实际需求进行判断和选择。同时,对于不常用的快捷键,我们也可以通过查阅相关文档或在线资源来了解其功能和用法,以便在需要时能够迅速掌握。

Windows 11新增的键盘快捷键为文件资源管理器的操作带来了更多的便利和效率。我们应该积极学习和使用这些新功能,将其融入到日常的文件管理工作中,以提高工作效率和减少操作难度。同时,我们也要保持对新功能的关注和探索,以便在未来的使用过程中发现更多实用的功能和快捷键。

















 473
473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









