




 博客参考相关链接,介绍旋转不变LBP特征。指出普通LBP特征有灰度不变性但无旋转不变性,研究人员在此基础上扩展提出旋转不变LBP特征,做法是不断旋转圆形邻域内LBP特征,选特征值最小的作为中心像素点的LBP特征。
博客参考相关链接,介绍旋转不变LBP特征。指出普通LBP特征有灰度不变性但无旋转不变性,研究人员在此基础上扩展提出旋转不变LBP特征,做法是不断旋转圆形邻域内LBP特征,选特征值最小的作为中心像素点的LBP特征。
参考:https://blog.youkuaiyun.com/quincuntial/article/details/50541815
旋转不变LBP特征
从(1)和(2)可以看出,上面的LBP特征具有灰度不变性,但还不具备旋转不变性,因此研究人员又在上面的基础上进行了扩展,提出了具有旋转不变性的LBP特征。
首先不断的旋转圆形邻域内的LBP特征,根据选择得到一系列的LBP特征值,从这些LBP特征值选择LBP特征值最小的作为中心像素点的LBP特征。具体做法如下图所示: 
如图,通过对得到的LBP特征进行旋转,得到一系列的LBP特征值,最终将特征值最小的一个特征模式作为中心像素点的LBP特征。
//旋转不变圆形LBP特征计算
template <typename _tp>
void getRotationInvariantLBPFeature(cv::Mat src, cv::Mat &dst, int radius, int neighbors)
{
//LBP特征图像的行数和列数的计算要准确
dst = cv::Mat::zeros(src.rows - 2 * radius, src.cols - 2 * radius, CV_8UC1);
for (int k = 0; k<neighbors; k++)
{
//计算采样点对于中心点坐标的偏移量rx,ry
float rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors));
float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors));
//为双线性插值做准备
//对采样点偏移量分别进行上下取整
int x1 = static_cast<int>(floor(rx));
int x2 = static_cast<int>(ceil(rx));
int y1 = static_cast<int>(floor(ry));
int y2 = static_cast<int>(ceil(ry));
//将坐标偏移量映射到0-1之间
float tx = rx - x1;
float ty = ry - y1;
//根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关
float w1 = (1 - tx) * (1 - ty);
float w2 = tx * (1 - ty);
float w3 = (1 - tx) * ty;
float w4 = tx * ty;
//循环处理每个像素
for (int i = radius; i<src.rows - radius; i++)
{
for (int j = radius; j<src.cols - radius; j++)
{
//获得中心像素点的灰度值
_tp center = src.at<_tp>(i, j);
//根据双线性插值公式计算第k个采样点的灰度值
float neighbor = src.at<_tp>(i + x1, j + y1) * w1 + src.at<_tp>(i + x1, j + y2) *w2 \
+ src.at<_tp>(i + x2, j + y1) * w3 + src.at<_tp>(i + x2, j + y2) *w4;
//LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得
dst.at<uchar>(i - radius, j - radius) |= (neighbor>center) << (neighbors - k - 1);//dst默认为CV_8UC1,因此只支持8个采样点
}
}
}
//进行旋转不变处理
for (int i = 0; i<dst.rows; i++)
{
for (int j = 0; j<dst.cols; j++)
{
unsigned char currentValue = dst.at<uchar>(i, j);
unsigned char minValue = currentValue;
for (int k = 1; k<neighbors; k++)
{
//循环左移
unsigned char temp = (currentValue >> (neighbors - k)) | (currentValue << k);
if (temp < minValue)
{
minValue = temp;
}
}
dst.at<uchar>(i, j) = minValue;
}
}
}
int main()
{
cv::Mat src = imread("..\\..\\image\\keliamoniz1.jpg", 0);
cv::Mat dst;
//getOriginLBPFeature<uchar>(src, dst);
//getCircularLBPFeatureOptimization<uchar>(src, dst, 1, 8);
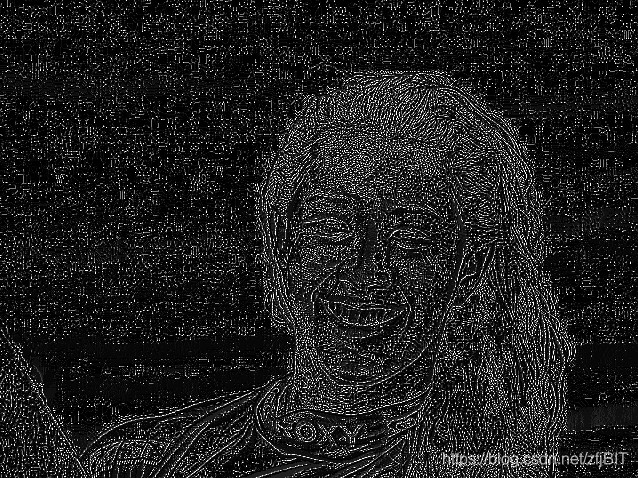
getRotationInvariantLBPFeature<uchar>(src, dst, 1, 8);
return 0;
} 


















 3448
3448

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











