







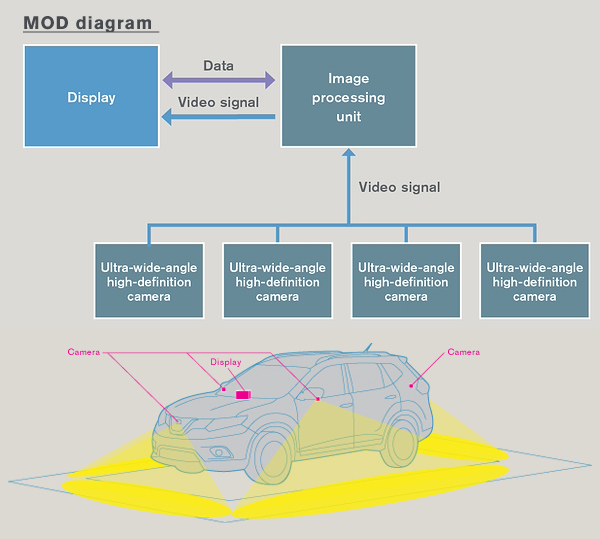
MOD全称为Moving Object Detection,中文“移动物体检测”。主要的作用是泊车时,周围有人或物体经过探测区域被检测到给驾驶员声音和视觉提醒。
以NISSAN MOD为例说明下基于环视相机的MOD系统:
MOD系统类型:
1. 基于四路环视相机数据进行移动物体检测;
工作场景:
(1)车停止或空挡:在环视拼接IPM视图进行移动物体检测;
(2)前进:在前视视角进行移动物体检测;
(3)倒车:在后视视角进行移动物体检测;
2. 基于单路后视相机数据进行移动物体检测:倒车时,在后视视角进行移动物体检测;

MOD方案流程简图:
东风日产天籁 MOD功能实测
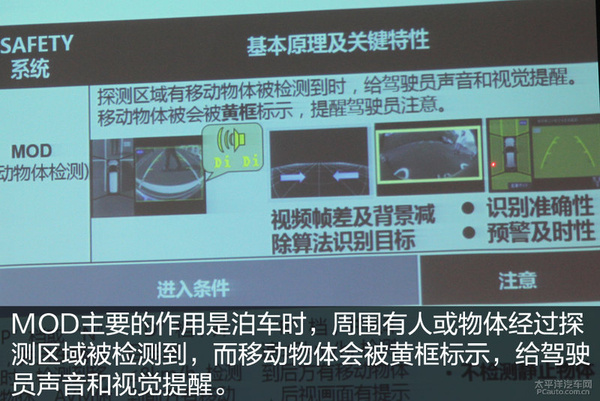
被检测到的物体必须是移动物的,它检测不到静止的物体。
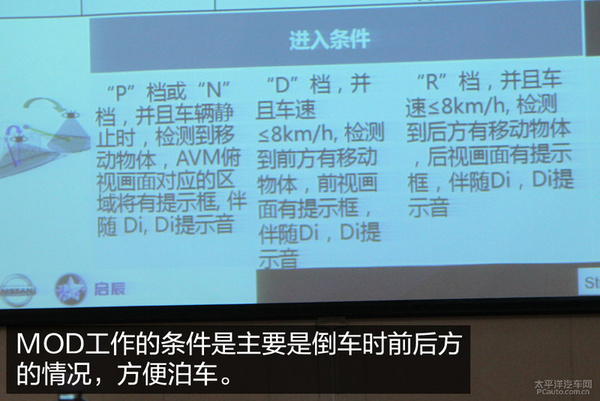
工作条件:第一,P挡或者N挡,并且车辆静止时,检测到移动物体,AVM俯视画面对应区域将有提示框,伴随嘀嘀嘀提示音。第二,D挡并且车速小于或等于8Km/h,检测到前方有移动物体,前视画面有提示框,伴随有嘀嘀嘀提示音。第三,R挡,并且车速小于或等于8km/h时,检测到后方有移动物体,后视画面有提示框,伴随有嘀嘀嘀提示音。


















 2662
2662

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











