




 本文档介绍了在Windows环境下使用VMware安装Ubuntu的过程,并详细阐述了如何在Ubuntu中安装Graphviz及其常用布局引擎和输出格式。此外,还提供了RoboticsLibrary的安装步骤,包括简易安装和完整安装选项,以及查看已安装包信息的方法。虽然尝试了一些功能但未成功调用,文章仍提供了完整的安装流程供参考。
本文档介绍了在Windows环境下使用VMware安装Ubuntu的过程,并详细阐述了如何在Ubuntu中安装Graphviz及其常用布局引擎和输出格式。此外,还提供了RoboticsLibrary的安装步骤,包括简易安装和完整安装选项,以及查看已安装包信息的方法。虽然尝试了一些功能但未成功调用,文章仍提供了完整的安装流程供参考。
虚拟机安装Ubuntu + 编译其他包
- windows下通过虚拟机安装Ubuntu
- 安装机器人仿真工具graphviz
- 安装Robotics library
- 安装opencv4 并测试
1.虚拟机安装ubuntu
Windows下通过虚拟机安装Ubuntu省去来回切系统的步骤,提高效率
-
1.VMware下载并创建虚拟机:VMware下载官网
- 也可以通过我的百度网盘链接下载:
通过网盘分享的文件:VMware-workstation-full-17.0.0-20800274.exe 链接:
https://pan.baidu.com/s/1LGzI0Q8SLdjVAlDRDbbTEQ?pwd=ak4r 提取码: ak4r

- 2.打开VMware创建虚拟机:傻瓜式安装,步骤省略,主要是选对ubuntu镜像文件,安装路径自己可设

-
有一个分配内存操作,这里建议分配的大一些,不然编译一些包容易报内存错误
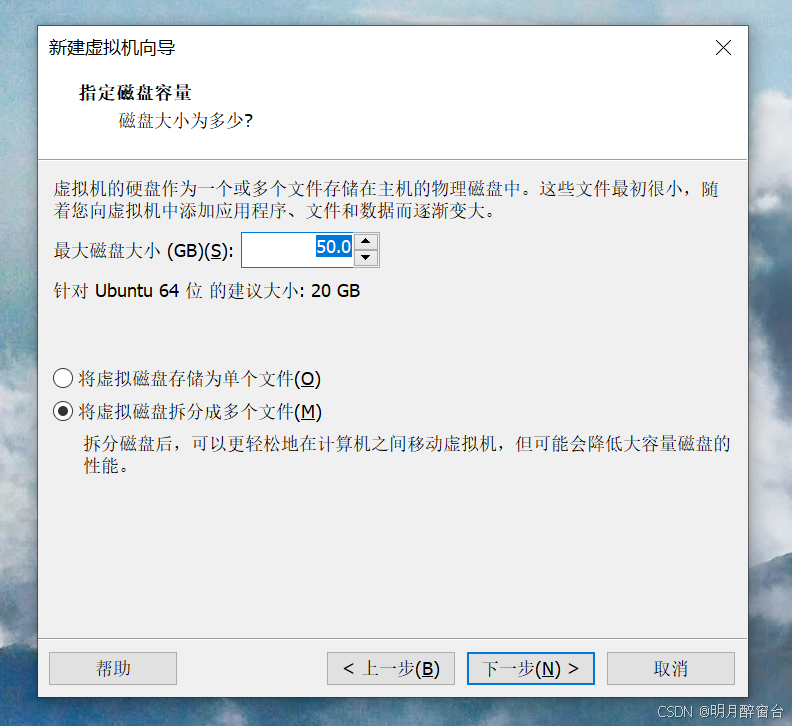

-
3.等待安装成功…,可以设置语言为中文Chinese

2.安装graphviz
或者上官网:http://www.graphviz.org/download/
sudo apt-get install graphviz
或者
sudo apt install graphviz
-
Graphviz支持几种布局引擎:
dot : 默认布局方式,主要用于有向图
neato : 主要用于无向图
twopi : 主要用于径向布局
circo : 圆环布局
fdp : 主要用于无向图
sfdp : 主要绘制较大的无向图
patchwork : 主要用于树哈希图(tree map) -
Graphviz支持的输出图片格式更是相当的多,常用的有以下几种:
pdf :
gif
png :
jpeg : 一种有损压缩图片格式
bmp : 一种位图格式
svg : 矢量图,一般用与Web,,可以用浏览器打开
ps : 矢量线图,多用于打印
更多的输出格式可以浏览Graphviz输出格式进行查看。 -
编写下边代码并保存为
sample.dot文件
digraph G{
main -> parse -> execute;
main -> init;
main -> cleanup;
execute -> make_string;
execute -> printf;
init -> make_string;
main -> printf;
execute -> compare;
}
测试:
dot -Tpng sample.dot -o sample.png

3.Robotics library安装
- 简易安装命令
sudo apt-add-repository ppa:roblib/ppa
sudo apt-get update
sudo apt-get install librl-dev
- 完整安装
首先,在终端中执行以下命令。
sudo apt-add-repository ppa:roblib/ppa
sudo apt-get update
然后,安装RL的运行时文件,一些演示应用程序和示例模型。
sudo apt-get install librl librl-demos librl-examples
如果要使用机器人库开发软件,则应安装开发文件/库。
sudo apt-get install librl-dev
还提供了其他软件包,包括额外的应用程序、API 文档和调试符号。
sudo apt-get install librl-extras librl-doc librl-dbg
查看安装包信息:
apt-cache show librl

- 本来想实现下边效果的,然后装了半天包都没有调用成功,先这样吧!

4. opencv 安装
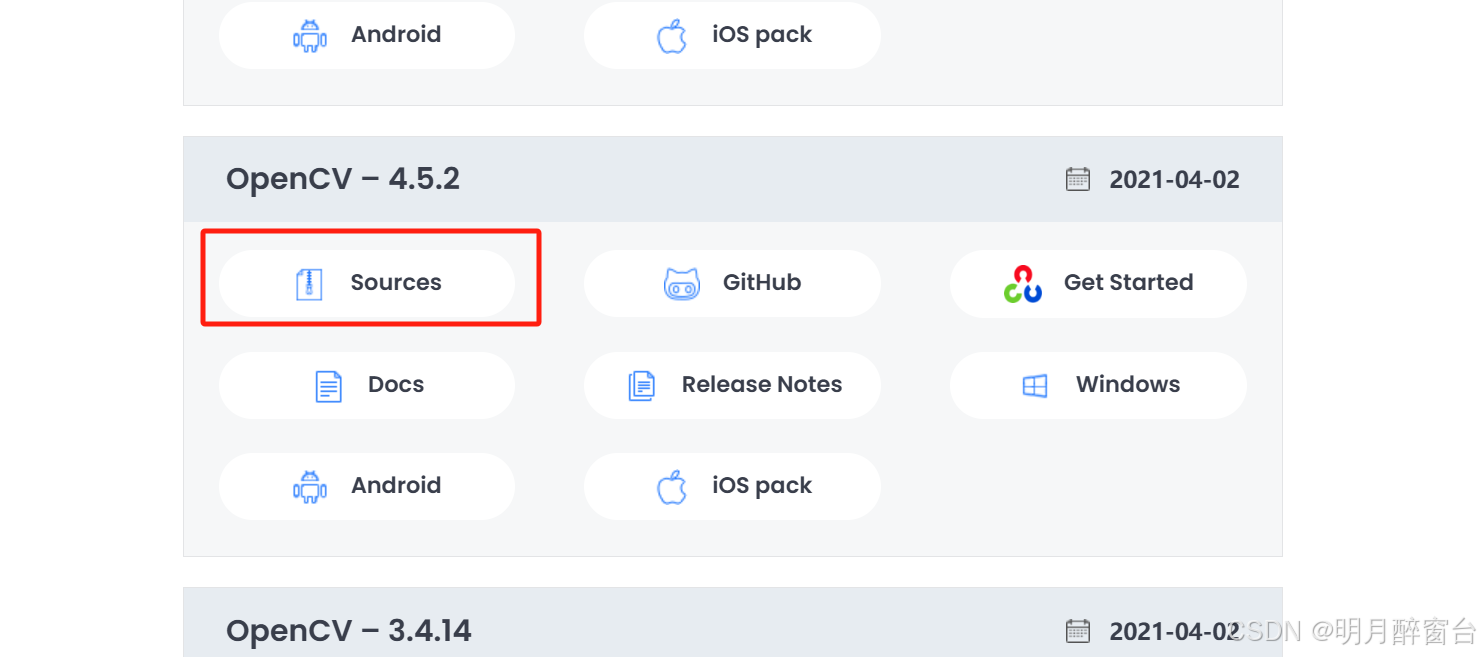
- opencv 下载源码包进行编译:https://opencv.org/releases/page/2/
- 在安装OpenCV前需要确保g++、cmake,、make,、wget,、unzip已安装。
sudo apt install -y g++
sudo apt install -y cmake
sudo apt install -y make
sudo apt install -y wget unzip
sudo apt install -y vim
- 安装依赖库
sudo apt-get install build-essential libgtk2.0-dev libgtk-3-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
- 点击
sources下载,下载完成后,需要解压。cd到下载OpenCV所在路径下(如果不知道当前位置,可以通过pwd命令查看当前位置),打开终端输入:
unzip opencv-4.5.2.zip
- 然后创建
build文件夹并进入路径:
cd opencv-4.5.2
sudo mkdir build
cd build
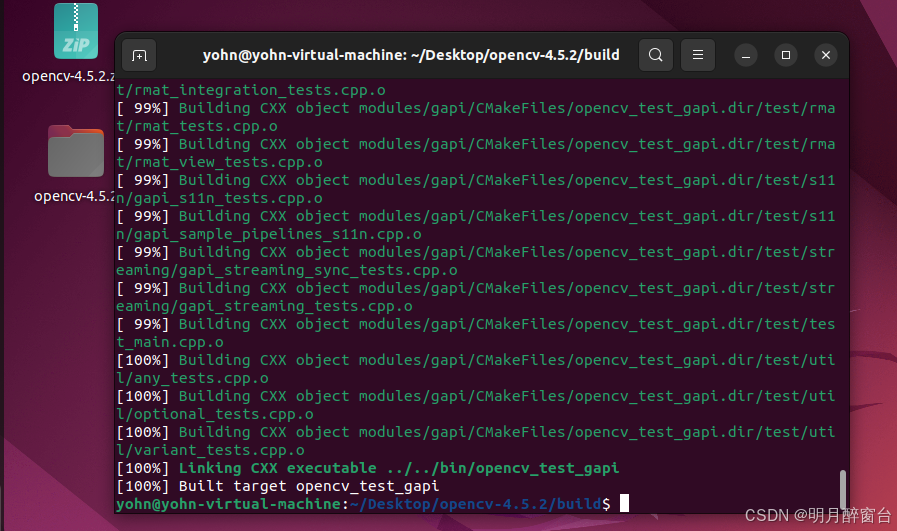
- 使用cmake 配置opencv编译:
#配置
sudo cmake -D CMAKE_BUILD_TYPE=Release -D OPENCV_GENERATE_PKGCONFIG=YES ..
#编译,-j4指同时使用4个进程
sudo make -j8
#安装
sudo make install
- 配置opencv
#opencv4.pc文件的默认路径:/usr/local/lib/pkgconfig/opencv4.pc若此目录下没有,可以使用以下命令搜索:
sudo find / -iname opencv4.pc
#配置pkg-config
#将路径加入到PKG_CONFIG_PATH
sudo vim /etc/profile.d/pkgconfig.sh
#在文件中加入下面一行
export PKG_CONFIG_PATH=/usr/local/lib/pkgconfig:$PKG_CONFIG_PATH
#保存退出后激活(先按esc,然后输入 :qa! )
source /etc/profile #重新加载环境变量
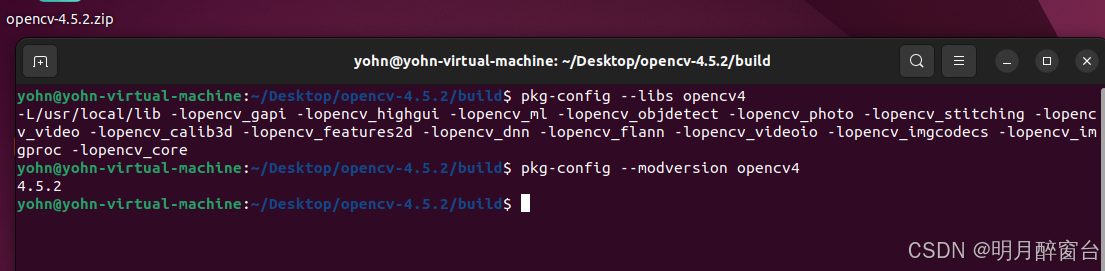
#通过如下命令验证是否安装成功
pkg-config --libs opencv4
pkg-config --modversion opencv4
- 配置动态库环境
#打开文件,可能为空
sudo vim /etc/ld.so.conf.d/opencv4.conf
在该文件末尾加上OpenCV的lib路径,保存退出
/usr/local/lib
#直接ctrl+c退出会在窗口最下边提示退出命令 **:qa and enter** 即先输入:qa 然后按enter键就可以退出了
#使配置的路径生效
sudo ldconfig
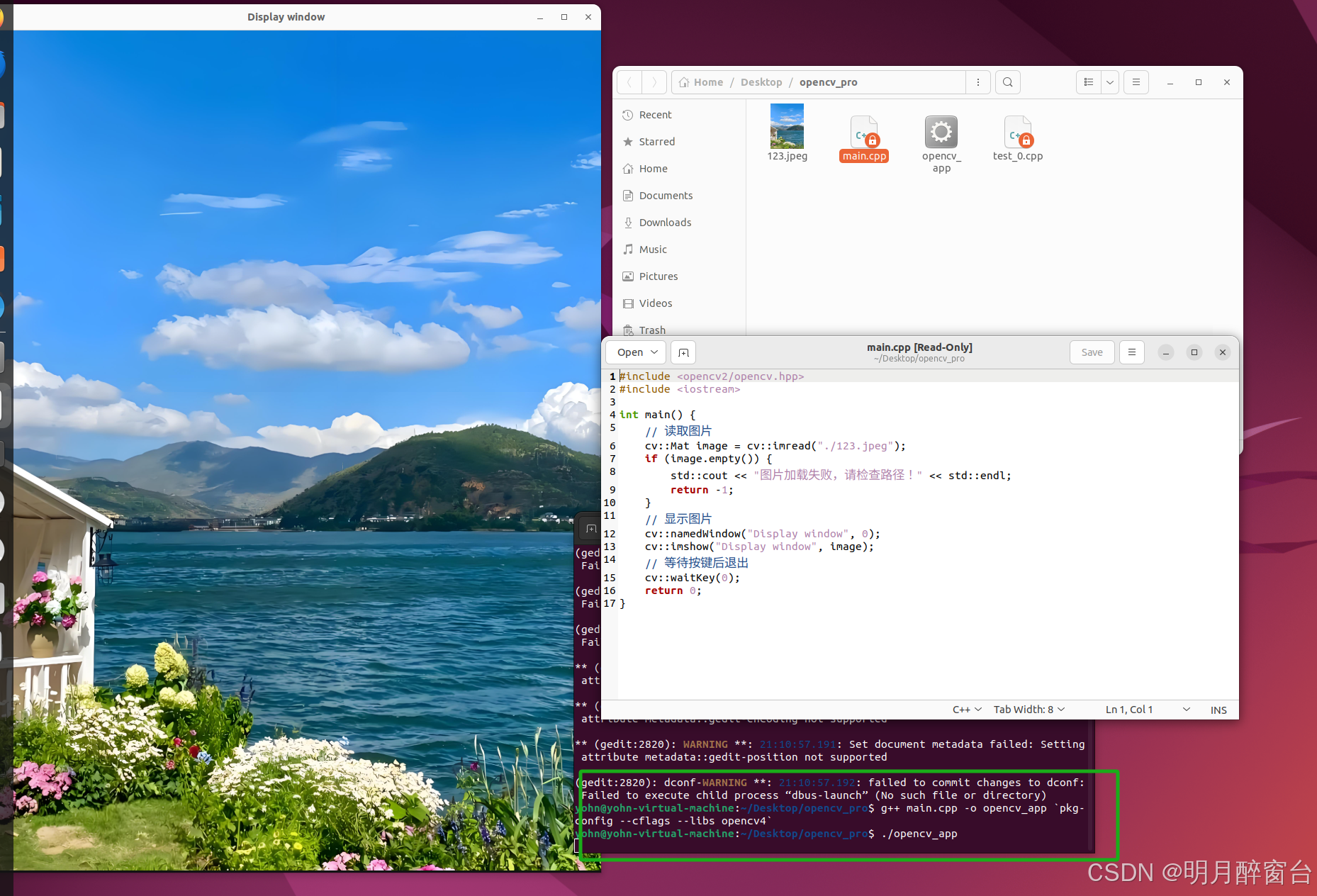
- 测试小程序:
- 命令行执行创建 main.cpp 文件并输入下列代码:
#创建 .cpp并打开
sudo gedit main.cpp
- 输入下列代码:
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 读取图片
cv::Mat image = cv::imread("photo.jpg");
if (image.empty()) {
std::cout << "图片加载失败,请检查路径!" << std::endl;
return -1;
}
// 显示图片
cv::imshow("Display window", image);
// 等待按键后退出
cv::waitKey(0);
return 0;
}
- 执行编译命令汇总:
#在想要搭建工程的位置新建文件夹opencv_project → cd到该文件夹 → 创建main.cpp代码 → 通过g++编译运行。命令如下:
mkdir opencv_project
cd opencv_project
touch main.cpp
g++ main.cpp -o opencv_app `pkg-config --cflags --libs opencv4`
./opencv_app


















 394
394

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











