







1.单目相机模型
相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程
能够用一个几何模型进行描述。这个模型有很多种,其中最简单的称为针孔模型。针孔模
型是很常用,而且有效的模型,它描述了一束光线通过针孔之后,在针孔背面投影成像的
关系。在本书中我们用一个简单的针孔相机模型来对这种映射关系进行建模。同时,由于
相机镜头上的透镜的存在,会使得光线投影到成像平面的过程中会产生畸变。因此,我们
使用针孔和畸变两个模型来描述整个投影过程。
在本节我们先给出相机的针孔模型,再对透镜的畸变模型进行讲解。这两个模型能够
把外部的三维点投影到相机内部成像平面,构成了相机的内参数。
1.1 针孔相机模型


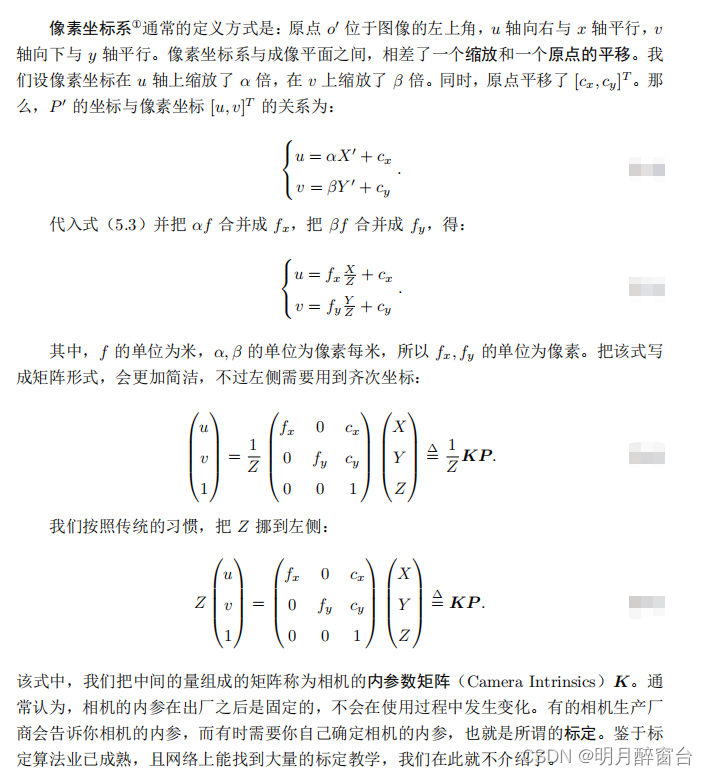
除了内参之外,自然还有相对的外参。考虑到我们使用的是 P 在相机坐标系下的坐标。由于相机在运动,所以 P 的相机坐标应该是它的世界坐标(记为 Pw)

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1157
1157

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











