 基于YOLO的行人检测与跟踪系统
基于YOLO的行人检测与跟踪系统





核心技术栈包含 YOLO 目标检测算法、多目标追踪模块,及 PyQt 框架开发的可视化交互界面,系统支持模型动态配置、多源输入检测与结果结构化归档
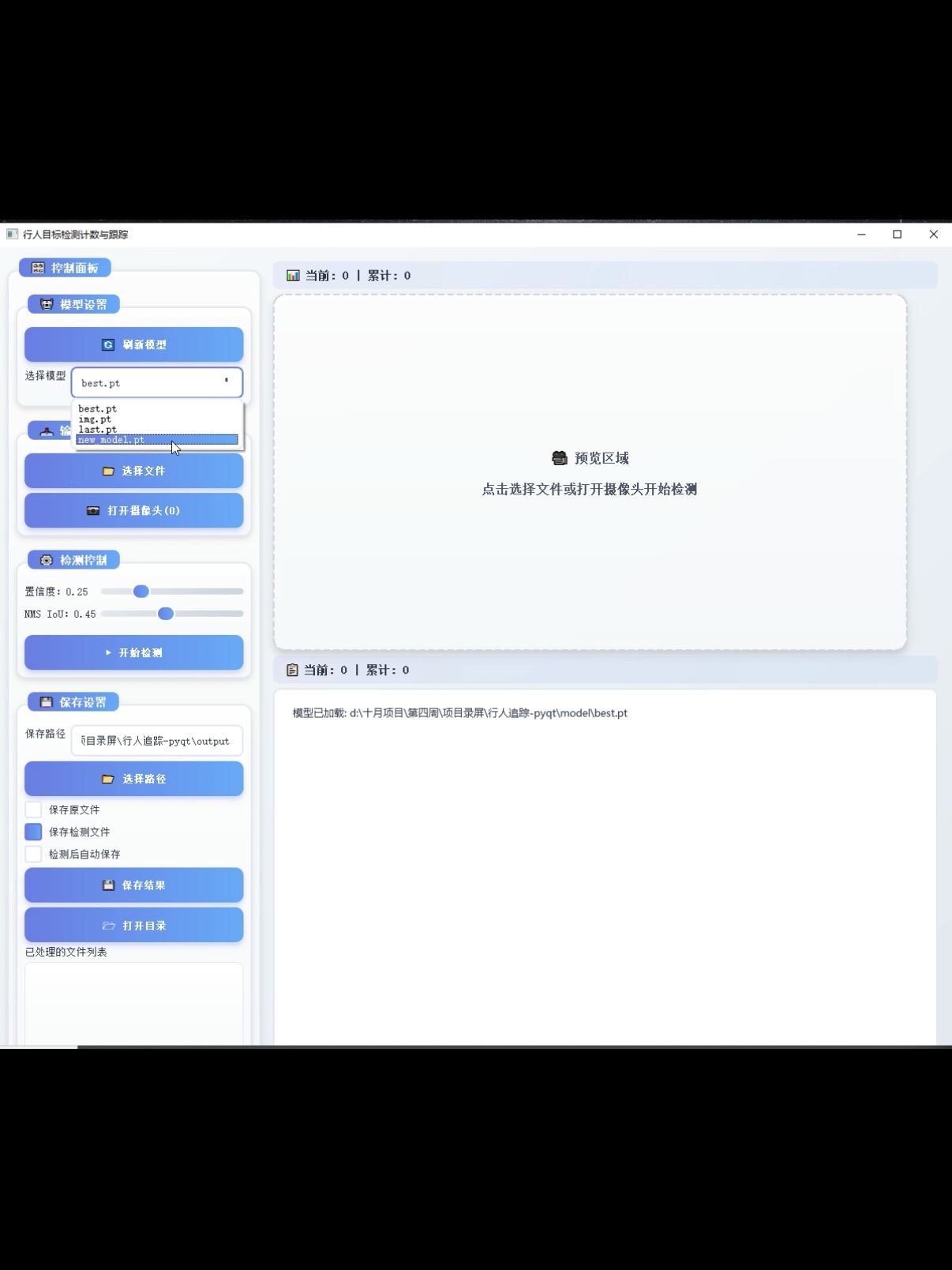
模型初始化与动态加载
选择预训练的 YOLO 权重文件(如 best.pt),通过 PyQt 界面的“刷新模型”按钮触发动态加载new model.pt。系统采用轻量级线程管理,避免主线程阻塞,实时更新检测器参数。
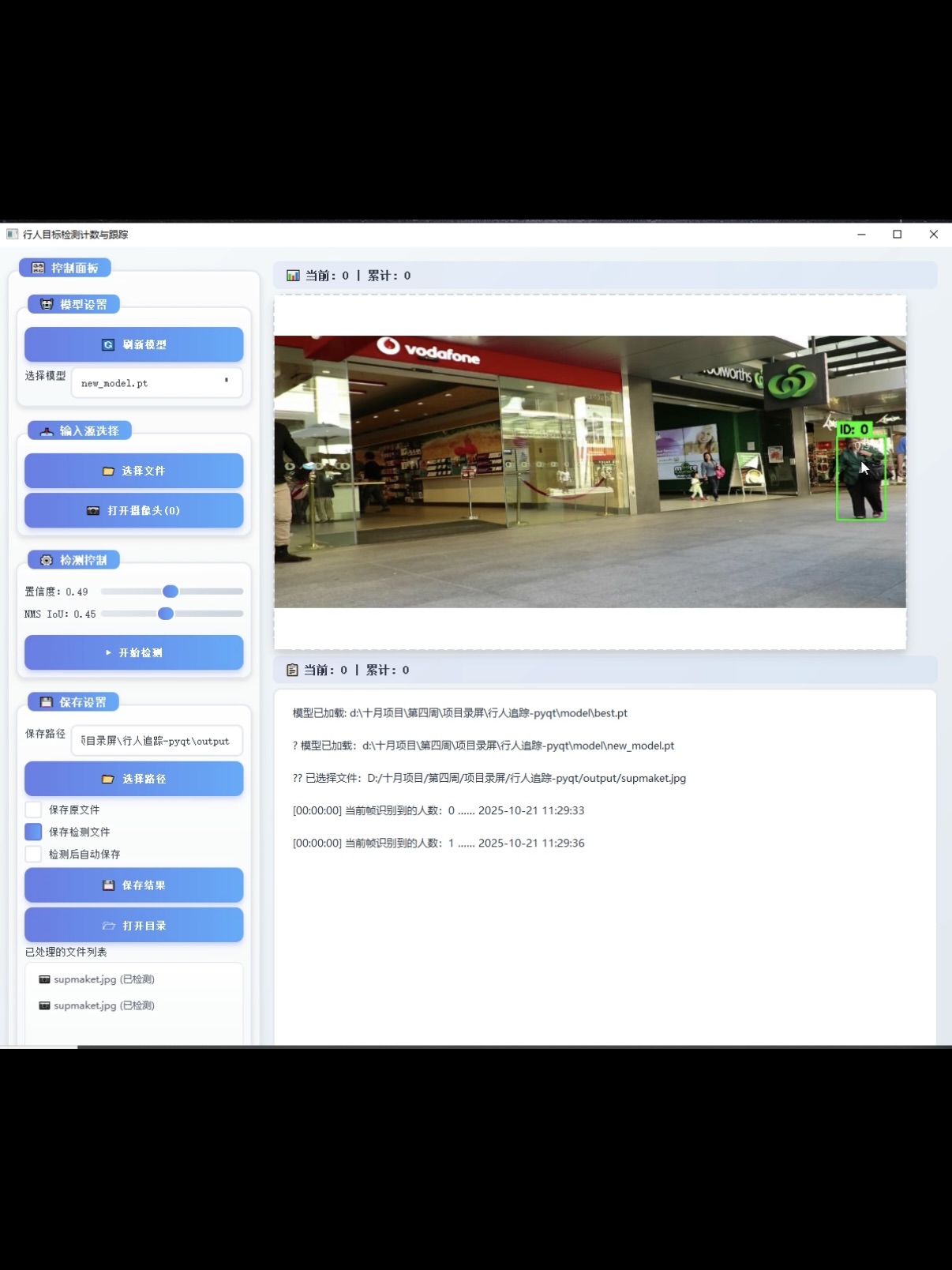
输入源与置信度调试
切换到图片输入模式,上传测试图片后调整置信度阈值。当阈值设为 1 时,低置信度行人目标被过滤;逐步降低至 区间后,漏检目标恢复显示。界面右侧统计面板同步更新检测结果,包括目标数量、置信度分布。
NMS 参数优化
调整非极大值抑制阈值至 1.0 时,同一目标产生多个重叠检测框(ID 跳变为 0-9)。将阈值降至 区间后,冗余框被合并,目标 ID 稳定为 0。实现单一目标的唯一标识,解决多目标追踪中的身份混淆问题。
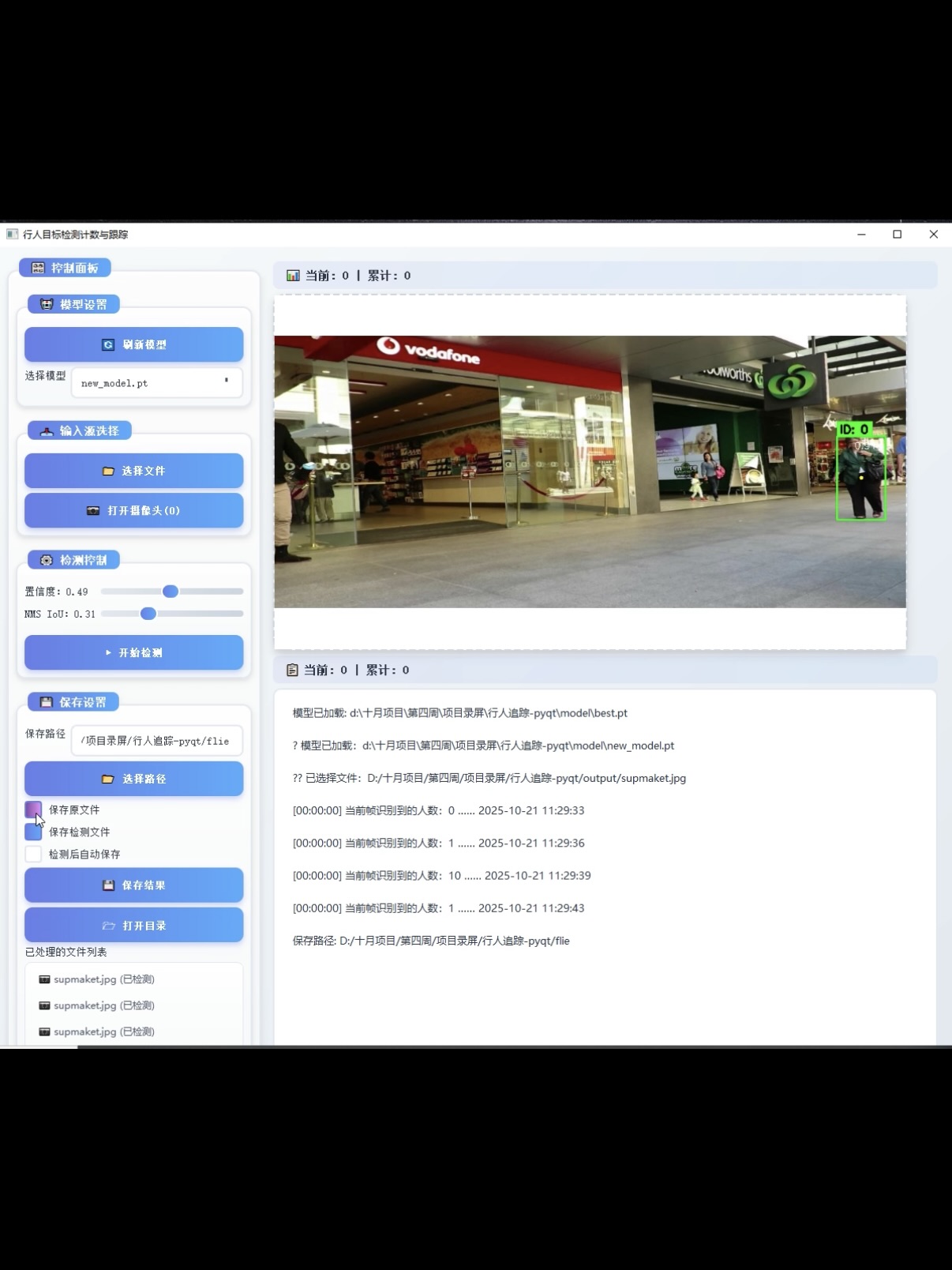
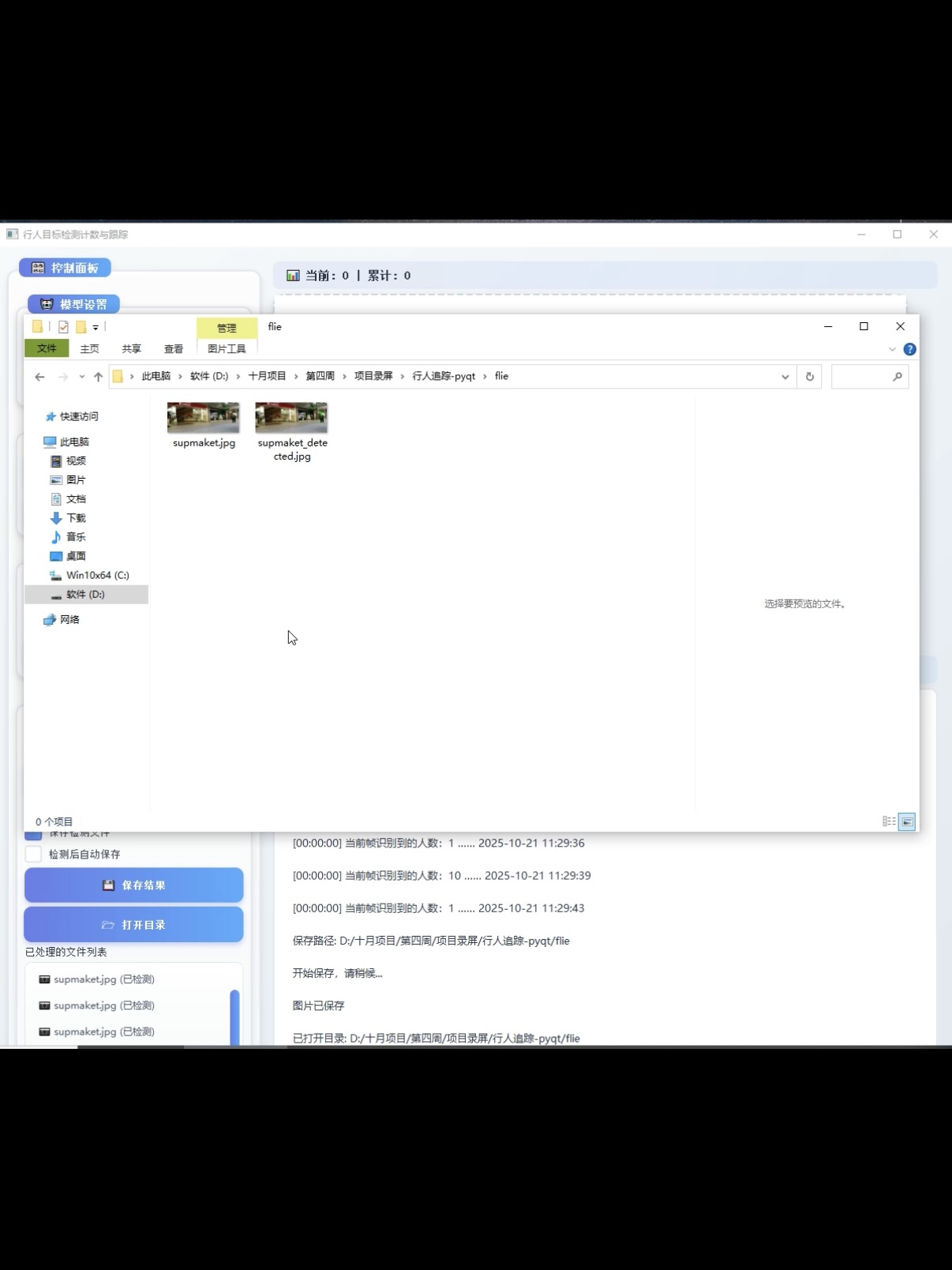
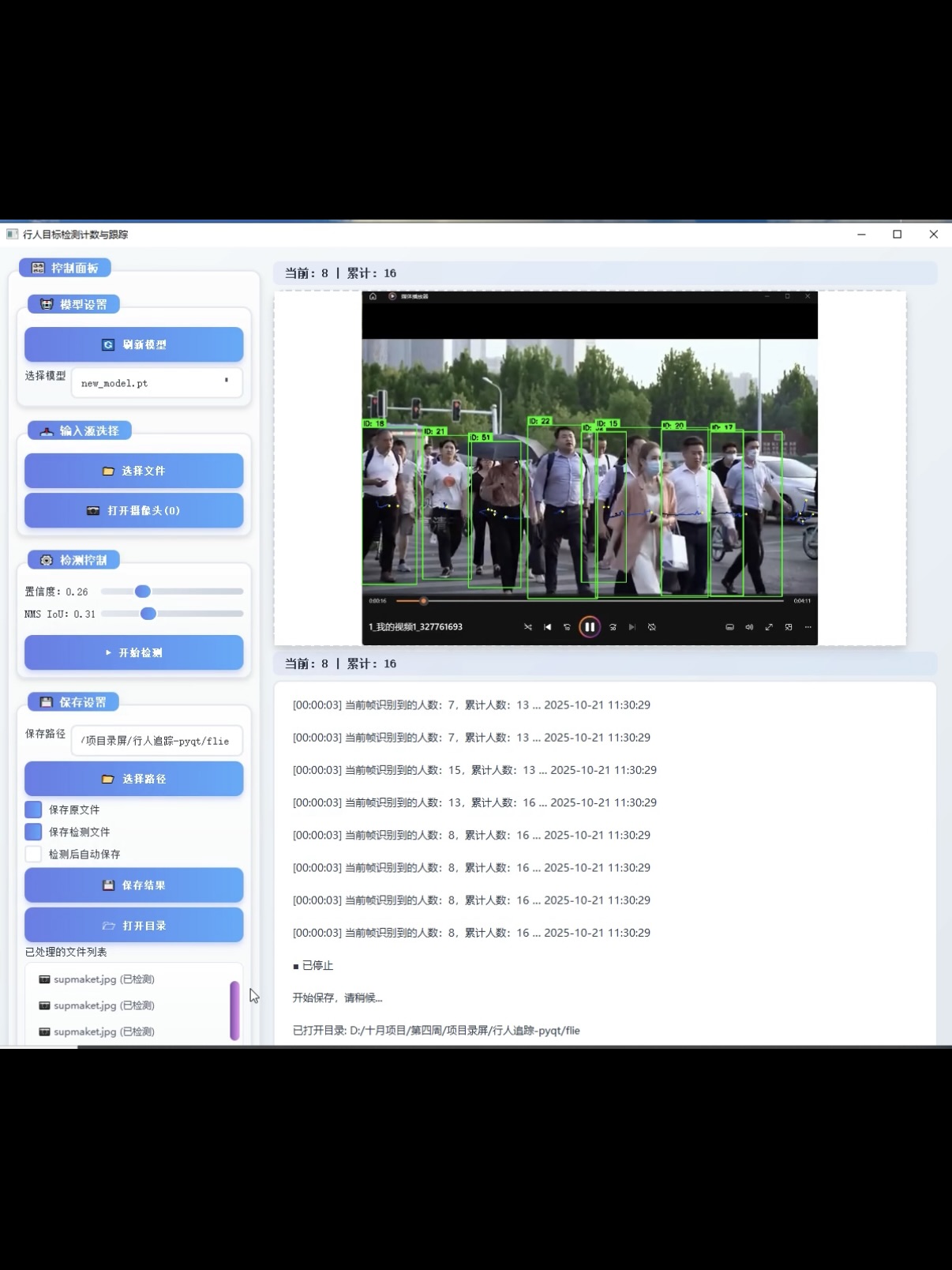
结果归档与双保存机制
在 PyQt 界面设置输出路径(如 系统本地),勾选“保存原文件+保存检测文件”选项。系统自动生成
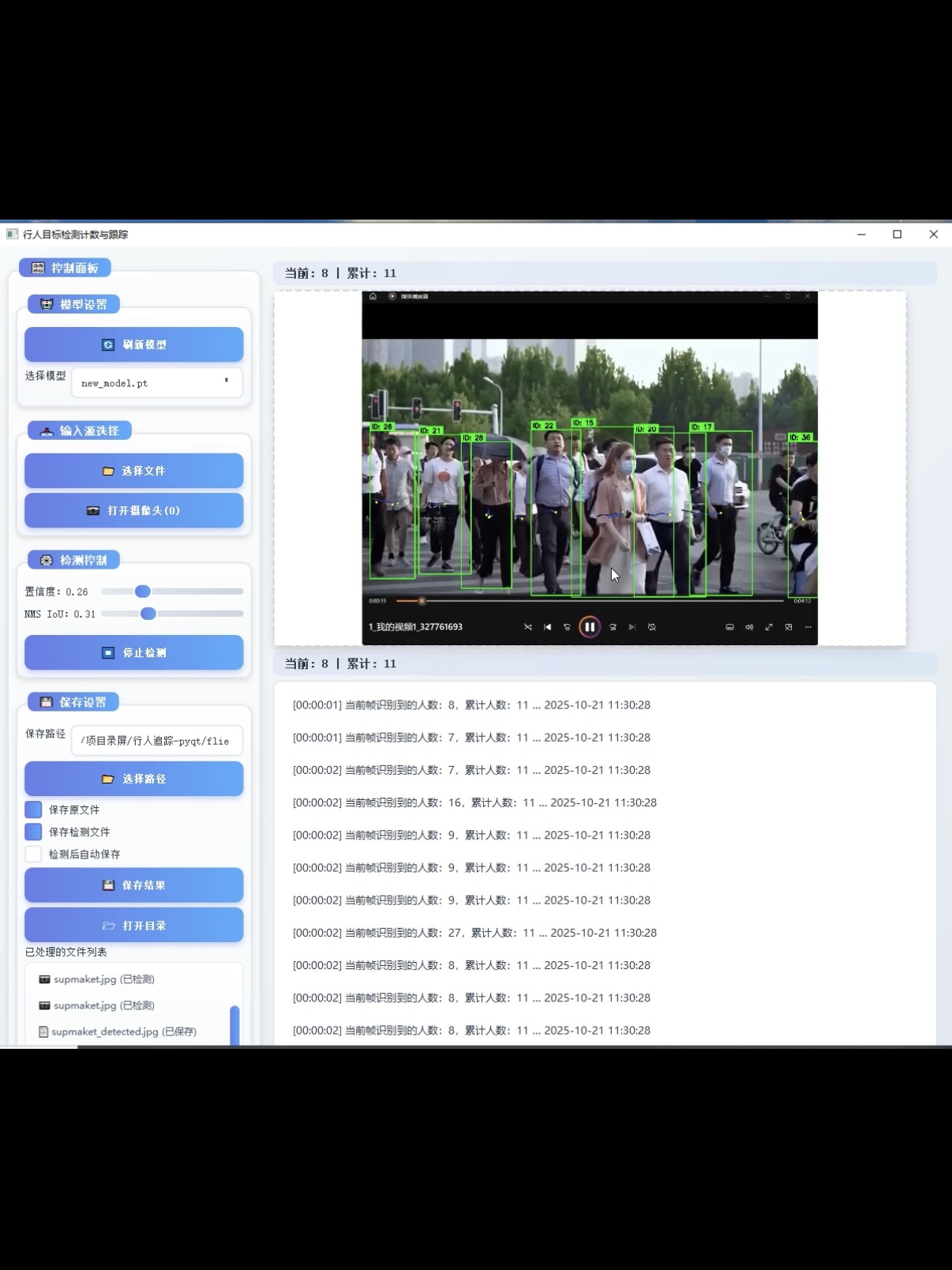
视频流实时检测
加载斑马线监控视频,系统逐帧执行:
- 检测阶段:YOLO 输出每帧检测结果。
- 追踪阶段:关联检测框与历史轨迹,更新 ID 并绘制运动路径。
- 计数与存储:统计穿越检测线的行人数量,视频结果,关键帧截图存档至指定目录。
历史任务管理
PyQt 的“任务列表”组件展示所有检测记录,支持按时间、输入类型筛选。点击条目可快速查看原始数据与标注结果,实现全流程可追溯。
赫兹威客官方交流群
赫兹威客官方交流群
赫兹威客官方交流群
https://qm.qq.com/q/ToiE4c056U![]() https://qm.qq.com/q/ToiE4c056U
https://qm.qq.com/q/ToiE4c056U


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









