



1.RIKIBOT opencv_apps图像处理示例
1、把小车平放在地板上,用远程软件登录到系统桌面,打开一个终端启动
roslaunch rikibot camera.launch

2、启动roslaunch opencv_apps edge_detection.launch进行边缘提取采集。

效果如下:

3、启动roslaunch opencv_apps hough_lines.launch进行哈夫变换直线检测。


4、启动roslaunch opencv_apps find_contours.launch 进行霍夫变换日元检测


5、 启动roslaunch opencv_apps convex_hull.launch 进行凸包检测


6、启动roslaunch opencv_apps general_contours.launch 进行椭圆形检测。


7、启动roslaunch opencv_apps face_detection.launch 进行人脸检测


8、启动 roslaunch opencv_apps people_detect.launch hot特征量进行人的检测。


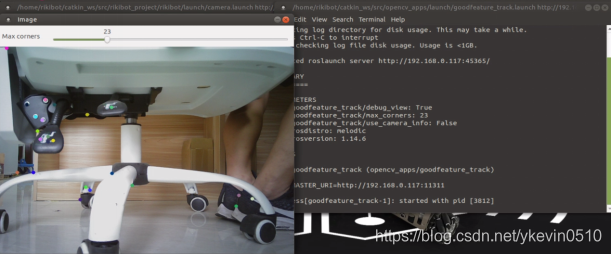
9、启动roslaunch opencv_apps goodfeature_track.launch 进行动作特征分析。

10、启动 roslaunch opencv_apps camshift.launch 进行颜色检测。


11、启动roslaunch opencv_apps fback_flow.launch 进行gunnar farneback (optle)检测


12、启动roslaunch opencv_apps lk_flow.launch 行lucas- kanade 的optle流检测 

13、启动roslaunch opencv_apps phase_corr.launch 进行周波数相位模拟计算。


14、动roslaunch opencv_apps rgb_color_filter.launch 进行图像过滤。


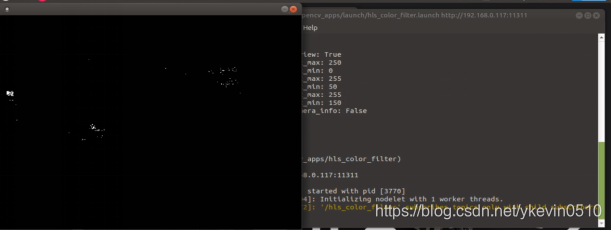
15、启动roslaunch opencv_apps hls_color_filter.launch 进行hls色特征采集

16、启动 roslaunch opencv_apps hsv_color_filter.launch进行hsv色特征采集


2.RIKIBOT Jetson Nano人体姿态检测、目标检测与图像分类
2.1 人体姿态检测
启动前先开启Jetson Nano 10W模式。
执行下面路径下的脚本:
启动加载过程比较久,1分钟以上,加载完成后有弹窗出现,人站在摄像头前面就可以识别姿态了
启动命令:
roslaunch rikibot_openpose_ros rikibot_openpose.launch

2.2 基于Jeston nano的目标检测与图像分类
1、启动摄像头
roslaunch rikibot camera.launch
2、目标检测
roslaunch rikibot_deep_learning rikibot_detect.launch
打开rqt_image选择检测话题 查看识别结果
3、目标分类,分类结果看后台窗口输出
roslaunch rikibot_deep_learning rikibot_classfiy.launch
3.RIKIBOT 无线姿态控制(重力感应)
该功能需要额外选配无线姿态传感器模块。硬件组成包含USB充放电管理,STM32F030主控芯片,集成MPU6050陀螺仪和蓝牙,3.7V 锂电池,能把陀螺仪姿态数据用蓝牙透传,从而进行无线姿态控制。



该模块需要静止水平放置开机上电后2秒自动校正XY与水平夹角偏移值。此时数据才是正常的控制范围。
3.1 先启动bringup.launch
roslaunch rikibot bringup.launch
3.2 再启动rikibot_bluetooth_contorl.launch
roslaunch rikibot rikibot_bluetooth_contorl.launch
连接上X Y倾斜角度都是100 默认零点位置。

4.其他扩展:
1、雷达扫描角度范围设置
进去以下路径修改rplidar.launch文件

原有文件如下

参数说明:
symmetry 为true 作用是在雷达0度位置,以对称的形式屏蔽角度
symmetry 为false 作用是在雷达0度位置,非对称的形式屏蔽角度
shield_start_angle 起始角度(范围0-180)
shield_end_angle 终止角度(范围0-180)
接下来 把symmetry 设置为 false
shield_start_angle 设置0
shield_end_angle设置45 以非对称形式屏蔽45度

然后启动建地图后效果如下:

接下来 把symmetry 设置为 true
shield_start_angle 设置0
shield_end_angle设置45 以对称形式屏蔽45度

然后启动建地图后效果如下:

雷达的实际角度如下图所示

最后 Rikirobot提供两驱动、四驱动、麦克纳姆轮、Omni全向三轮、Omni全向四轮、履带、阿克曼(舵机转向)、大型负载的各种ROS车,有配套指导、及完善售后。
QQ交流群:130486387
RIKIROBOT店铺连接
下面是店铺的二维码、微信公众号二维码、Rikirobot的交流群,有兴趣的可以扫一扫。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









