



 本文提出了一种新的多目标跟踪框架,通过引入潜在的遮挡目标switcher,增强了模型对于身份转换的鲁棒性。该框架结合了iou信息、reid外观特征以及一个switcher感知的分类器,有效减少了身份切换错误。
本文提出了一种新的多目标跟踪框架,通过引入潜在的遮挡目标switcher,增强了模型对于身份转换的鲁棒性。该框架结合了iou信息、reid外观特征以及一个switcher感知的分类器,有效减少了身份切换错误。
前言
本文用了两个目前多目标跟踪领域最常用的信息:iou信息以及reid外观特征。在此基础上,又引入了一个潜在的可能引起身份转换的遮挡目标switcher来参与亲和计算,从而提高了模型对于身份转换的鲁棒性。
贡献
- 提出了一个有效的多目标跟踪框架,学习捕获长期和短期线索,并做出自适应决策,进行鲁棒跟踪。
- 提出了一个具有switcher感知的分类器,在数据关联时,提升了对于身份转换的多目标跟踪鲁棒性。
跟踪流程
- 初始化跟踪列表以及视频帧数t=0t=0t=0。
- 在ttt帧时,对于目标XXX,利用单目标跟踪器子网络寻找目标XXX的模板EXE_XEX在下一帧It+1I_{t+1}It+1的位置。单目标跟踪子网络输出EXE_XEX在It+1I_{t+1}It+1最有可能的位置DtrackD_{track}Dtrack。
- 对于在It+1I_{t+1}It+1帧的检测结果DdetD_{det}Ddet,它对应的检测图像区域It+1,DdetI_{t+1, D_{det}}It+1,Ddet以及目标的历史图像区域{ItiXI^X_{t_i}ItiX},i=1,2,3,...,Ki=1,2,3,...,Ki=1,2,3,...,K被输入到ReID网络中获取长期ReID特征。
- 目标的预测位置DtrackD_{track}Dtrack、检测结果DdetD_{det}Ddet以及步骤3中的长期特征被结合为目标的匹配特征。
- 找到目标的潜在switcher,既可能会引起目标发生身份转换的另一个目标,获取他在当前帧的预测位置以及历史ReID特征,并结合为匹配特征。
- 一个switcher感知的分类器利用switcher和目标的匹配特征生成目标和检测之间的匹配分数,标志着这个检测结果是否应该与跟踪目标相匹配。对It+1I_{t+1}It+1帧的所有检测都进行上述步骤,计算出其与目标之间的匹配分数。更换目标,计算出所有检测和跟踪之间的匹配分数。
- 利用目标和检测之间的匹配分数建立一个二部图,使用最小成本网络流算法找到匹配结果。
- 对于匹配的目标,利用匹配的检测更新其跟踪位置。对于未匹配的目标,利用预测结果更新其位置。终止掉那些被认为是丢失或者被遮挡的目标跟踪。对于独立的检测如果其置信分数满足新跟踪的条件,则将其添加到跟踪列表中。
- 对每一帧重复步骤2-步骤8。
短期线索

如图所示:
- 跟踪预测采用SiamRPN单目标跟踪器实现。
- 当前帧目标XXX的模板EXE_XEX,调整尺寸为127×127127\times 127127×127。
- 根据目标XXX的位置,从It+1I_{t+1}It+1帧上裁取搜索区域的图像,将其尺寸调整为255×255255\times 255255×255,其缩放尺度与模板EXE_XEX的缩放尺度相同。
- 模板和搜索区域图像分别输入到一个共享权重的CNN网络中,得到CNN特征。将得到的CNN特征输入两个分支,一个分支生成锚点图的得分映射,一个分支生成锚点的边界框回归。
- 模板EXE_XEX的位置是搜索区域的得分映射中具有最高得分的位置DtrackD_{track}Dtrack。
- 对于检测的边界框位置DdetD_{det}Ddet,用以下公式计算短期特征:fs(Dtrack,Ddet)=IoU(Dtrack,Ddet)f_s(D_{track}, D_{det})=IoU(D_{track}, D_{det})fs(Dtrack,Ddet)=IoU(Dtrack,Ddet)
- 对于目标XXX,跟踪质量qXq_XqX如下计算:qX,t+1={qX,t+IoU(Dtrack,Ddet).p2,ifmatchedqX,t.decay.pk,otherwiseq_{X,t+1}=\left\{ \begin{aligned} &\frac{q_{X,t}+IoU(D_{track}, D_{det}).p}{2}&, if matched \\&q_{X,t}.decay.p^k&, otherwise \end{aligned} \right. qX,t+1=⎩⎨⎧2qX,t+IoU(Dtrack,Ddet).pqX,t.decay.pk,ifmatched,otherwise其中decay,kdecay, kdecay,k是超参数。如果目标跟踪的qXq_XqX低于阈值,则终止掉该不可靠跟踪。
长期线索
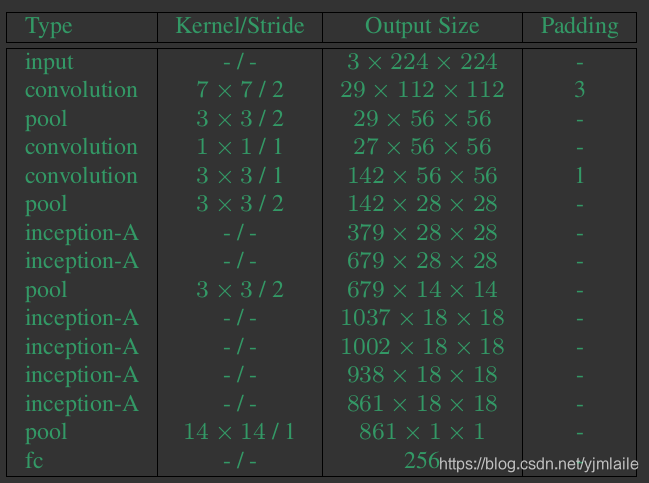
- 使用一个结构如图的GoogLeNet inception-V4的修改版本作为ReID子网络的backbone。ReID特征由分类之前的FC层获取。
- 使用下面的公式获取目标XXX的KKK帧历史图像:ti=argmint−iδ<t^<t−(i−1)δQ(It^X,i=1,2,3,...,K)t_i =\mathop{\arg\min}\limits_{t-i\delta<\widehat{t}<t-(i-1)\delta}Q(I^X_{\widehat{t}}, i=1,2,3,..., K)ti=t−iδ<t<t−(i−1)δargminQ(ItX,i=1,2,3,...,K)其中QQQ是一个由Resnet-18实现的输出的质量分数的网络。δ\deltaδ是一个决定选择时间间隔的超参数。
- 将所选择的目标历史图像和检测输入到ReID网络中得到他们的ReID特征,利用得到的检测特征按照如下公式得到目标与检测的KKK个长期特征:FlX={fl(AtiXAdet)∣i=1,...,K}F^X_l=\lbrace f_l(A^X_{t_i}A_{det})|i=1,...,K\rbraceFlX={fl(AtiXAdet)∣i=1,...,K}
其中fl(AtiXAdet)=AtiXT.Adet∣AtiX∣∣Adet∣f_l(A^X_{t_i}A_{det})=\frac{{A^X_{t_i}}^T.A_{det}}{|A^X_{t_i}||A_{det}|}fl(AtiXAdet)=∣AtiX∣∣Adet∣AtiXT.Adet AtiXA^X_{t_i}AtiX是值在ttt帧得到的目标XXX的第iii个历史图像的ReID特征,AdetA_{det}Adet是被匹配的检测提取的ReID特征。
switcher感知的分类器
- 通过以下公式找到当前目标XXX的潜在switcher:Λ=argmaxY∈S s.t.Y≠XIoU(Xt,Yt)\Lambda=\mathop{\arg\max}\limits_{Y\in S\ s.t. Y\neq X}IoU(X_t, Y_t)Λ=Y∈S s.t.Y=XargmaxIoU(Xt,Yt)其中SSS为目标集合
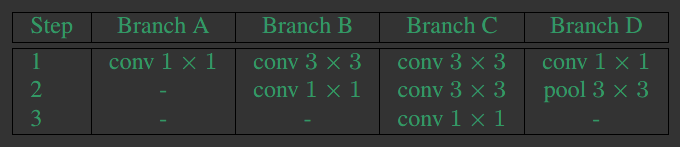
- 将SOTSOTSOT和ReID子网络作为一个特征提取操作ϕ\phiϕ,将这两个子网络的输入,既目标XXX和检测结果DDD表示为ΓX,D\Gamma_{X,D}ΓX,D,则得到的检测DDD对于目标XXX的匹配特征为:ϕ(ΓX,D)={fs(Dtrack,Ddet)}∪FlX\phi(\Gamma_{X,D})=\lbrace f_s(D_{track},D_{det})\rbrace\cup F^X_lϕ(ΓX,D)={fs(Dtrack,Ddet)}∪FlX 其中ϕ(ΓX,T)\phi(\Gamma_{X,T})ϕ(ΓX,T)的维度为K+1K+1K+1,switcher与检测DDD之间的匹配特征为ϕ(ΓΛ,D)\phi(\Gamma_{\Lambda,D})ϕ(ΓΛ,D)也是如此计算。然后将switcher以及目标XXX对于检测DDD的匹配特征拼接起来作为分类器的输入。
- 采用正则化牛顿增强决策树作为分类器。分类步骤时,由分类器得到输出yyy,如果大于阈值ζm\zeta_mζm,则将对应的边赋值1−y1-y1−y添加二部图中。
个人感悟
这篇文章最大的创新就是在计算亲和力时引入了一个switcher来增强模型对于遮挡的鲁棒性,有效减少了IDS的数量。其次,采用跟踪全局质量分数决定目标跟踪的终止,相比直接在连续NNN帧的丢失后把跟踪终止,考虑到了每个丢失跟踪的丢失程度,更准确的选择该终止的跟踪,一定程度上抑制了IDS和FP。然后,采用一个质量过滤器选择目标的历史图像,相比在前NNN中的固定帧数选择历史图像,能够得到与目标更相似的外观特征。
作者在MOT16和MOT17上评估了模型,都取得了SOTA的结果。可惜就是没开源,看不到具体的实现。

















 725
725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









