




 本文详细介绍了CAN通信的各个层次,包括应用层、交互层、网络层、数据链路层和物理层,以及AUTOSAR架构中各模块的作用,展示了从软件到硬件的通信流程。重点讲解了CANTransceiver的硬件功能和网络模式,以及CANbus的工作特性。
本文详细介绍了CAN通信的各个层次,包括应用层、交互层、网络层、数据链路层和物理层,以及AUTOSAR架构中各模块的作用,展示了从软件到硬件的通信流程。重点讲解了CANTransceiver的硬件功能和网络模式,以及CANbus的工作特性。
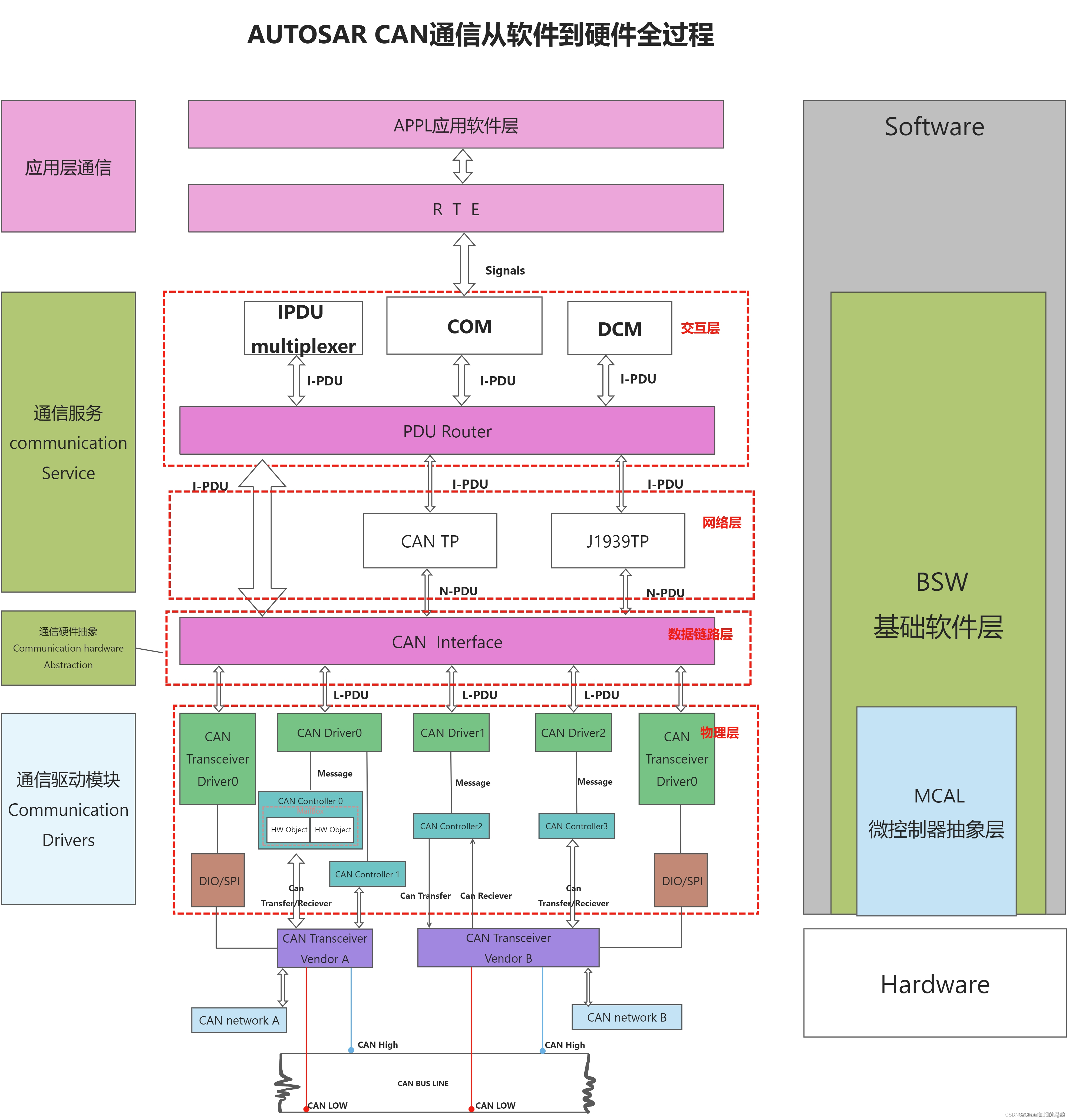
1、CAN通信概略图和基本概念介绍
应用层APPL、RTE(实时运行环境 Runtime Environment)
交互层:
IPDU multiplexer:协议数据单元复用模块
COM:COMMUNICATION 通信模块
DCM: 诊断通信管理模块(Diagnostic Communication Manager)
PDUR:Protocol Data Unit Router 协议数据单元(PDU)路由器
网络层:
CAN TP: CAN Transport Layer CAN传输层
CAN TP提供的服务包括:传输方向的数据分割、接收方向的数据重组、 数据流控制、检测分割会话中的错误、传输取消、接收取消
J1939 TP:基于J1939协议的CAN TP,J1939Tp模块实现了SAEJ1939标准中的两种数据传输方式BAM和CMDT
数据链路层:
CAN Interface:CAN 接口层(CanIf)是访问CAN总线的标准接口
物理层:
CAN Driver: CAN 驱动,可以实现对CAN控制器的初始化、发送/接收CAN报文、对接收报文的指示与对发送报文的确认、唤醒检测、溢出和错误处理等功能。
CAN Controller: CAN控制器;
CAN Transceiver Driver: CAN收发器驱动程序抽象了CAN收发器硬件。它为较高层提供了一个独立于硬件的接口。它利用MCAL层的api从ECU布局中抽象出来,访问CAN收发硬件
硬件部分:
CANTransceiver:CAN收发器,是一种硬件设备,可将CAN总线上使用的信号电平调整为微控制器识别的逻辑(数字)信号电平。此外,收发器还能够检测电气故障,例如布线问题,接地偏移或长主导信号的传输。根据与微控制器的接口,它们会标记由单个端口引脚汇总
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5104
5104

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









