



ESP32+步进电机:机械臂从“瘫痪”到“灵活走位”的秘密,软硬件全解析!
各位电子圈的“折腾爱好者”,大家好!今天咱们来聊个既硬核又好玩的话题——用ESP32驱动步进电机,让机械臂从“一堆零件”变身“精准工具人”。相信不少朋友都有过这样的经历:买了一堆机械臂零件,结果卡在“如何让它动起来”这一步;要么是电机转得乱七八糟,要么是ESP32发不出正确指令,最后只能让零件在角落积灰。别慌!今天这篇博客,咱们就从硬件到软件,用“幽默+严谨”的风格,把这件事讲得明明白白,让你看完就能上手折腾。
一、硬件篇:给机械臂凑齐“四肢百骸”
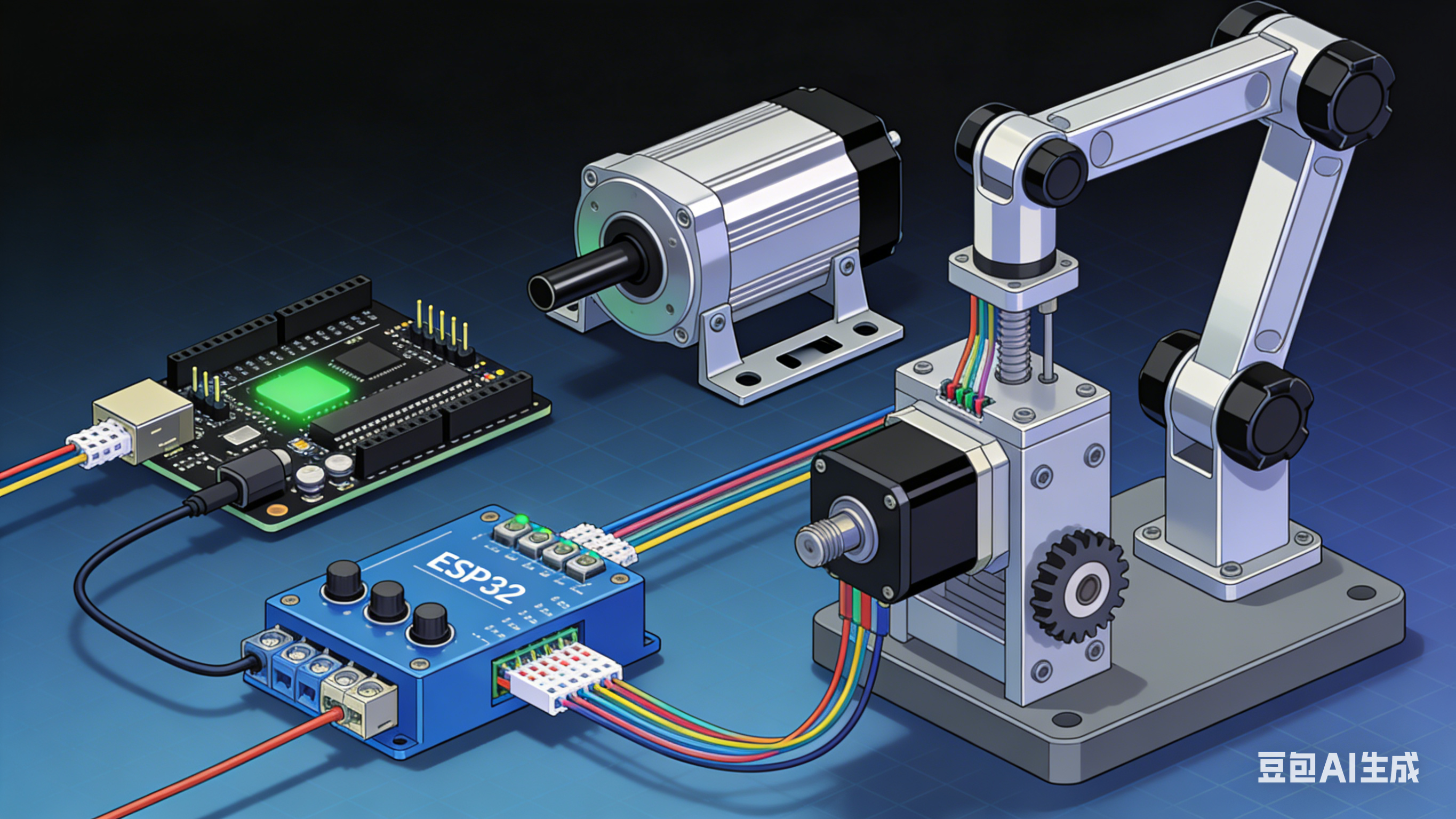
如果把机械臂比作一个“小机器人”,那硬件就是它的身体——ESP32是“大脑”,步进电机是“肌肉”,驱动模块是“神经”,再加上一些辅助零件,才能组成一个完整的“运动系统”。咱们一个个来说,避免大家买错零件走弯路。
1. 核心大脑:ESP32开发板(不是随便一块都行,但也不用选最贵的)
为什么选ESP32而不是Arduino Uno?答案很简单:ESP32性价比太高了!不仅有足够多的IO口(支持PWM、SPI、I2C等多种通信方式),还自带WiFi和蓝牙,后期想做远程控制(比如用手机APP操控机械臂)简直是“自带buff”。新手朋友建议选ESP32-DevKit V1,价格也就二三十块,稳定性够强,就算不小心接错线(别太离谱),也不容易直接“烧脑”。
这里插一句:别觉得“大脑”越高级越好,对于入门级机械臂(比如2-4自由度),ESP32的性能完全够用,没必要花大价钱买工业级MCU,咱们先把“基础玩法”玩明白再说。
2. 动力肌肉:步进电机(选对型号,避免“肌无力”)
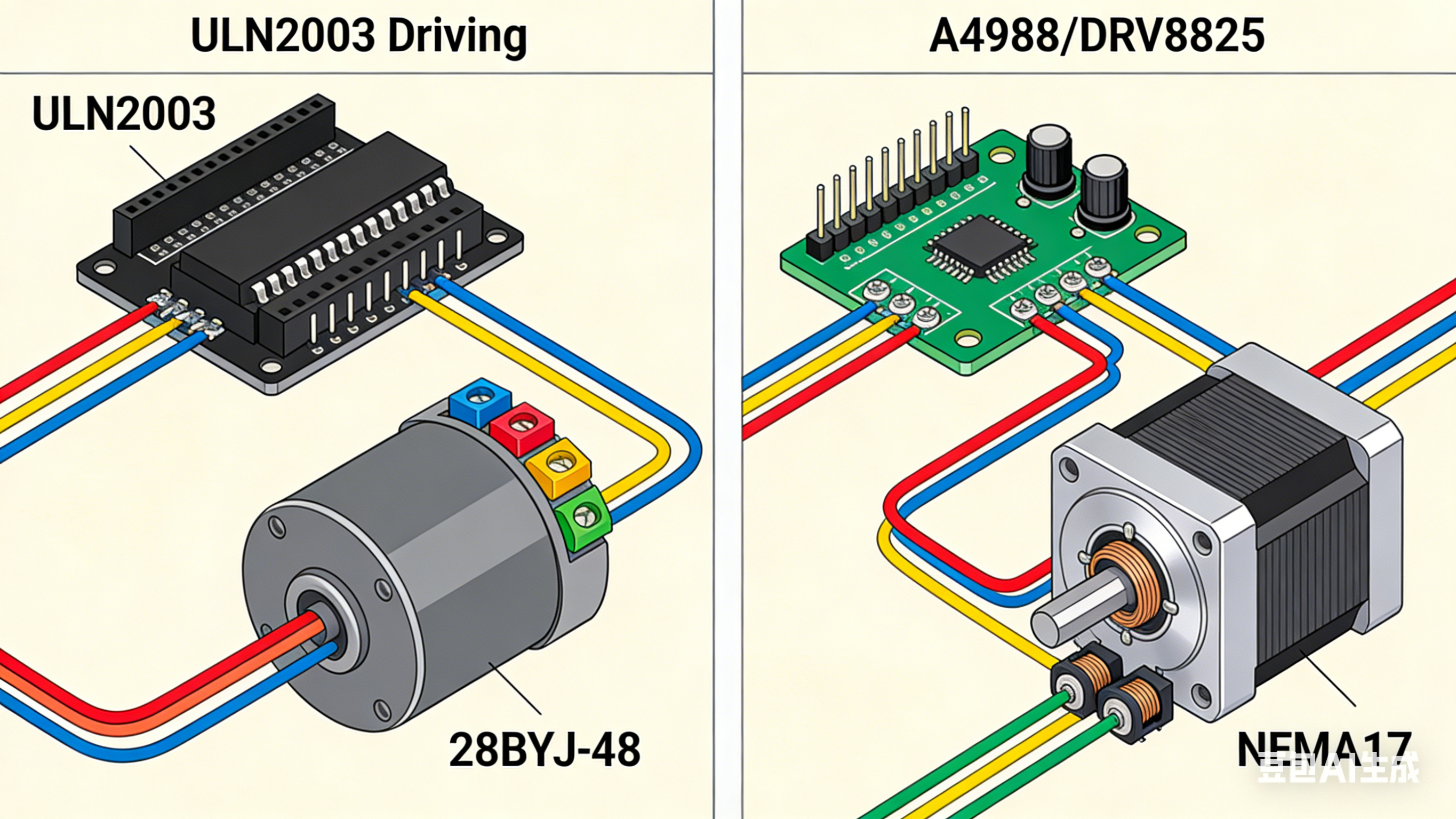
机械臂的运动全靠步进电机,它和普通直流电机最大的区别是:能精准控制转动角度(比如每一步转1.8度),这也是机械臂能“精准走位”的核心原因。入门级机械臂常用的步进电机主要有两种:28BYJ-48和NEMA17。
-
28BYJ-48步进电机:堪称“入门神器”,价格便宜(5块钱左右一个),体积小,扭矩适中,适合做小型机械臂(比如桌面摆件式)。缺点是转速较慢,而且是“减速步进电机”(内部有齿轮组),虽然精度够,但爆发力稍弱。新手第一次折腾,选它准没错,就算玩坏了也不心疼。
-
NEMA17步进电机:如果你的机械臂需要带动更重的负载(比如夹取小物件),那就选它。扭矩比28BYJ-48大很多,转速也更快,是中高端入门机械臂的首选。缺点是价格稍贵(20块左右一个),而且需要更大的驱动电流,供电部分要跟上。
重点提醒:步进电机不能直接接ESP32!ESP32的IO口输出电流太小(只有几毫安),根本带不动步进电机,强行连接只会让ESP32“罢工”,甚至烧毁IO口。这时候就需要“神经中枢”——驱动模块。
3. 神经中枢:步进电机驱动模块(打通大脑和肌肉的“桥梁”)
驱动模块的作用很简单:把ESP32发出的弱电信号(控制指令)转换成强电信号(驱动电流),让步进电机动起来。不同的步进电机,对应不同的驱动模块,别买混了!
-
ULN2003驱动板:专门搭配28BYJ-48步进电机,价格3块钱左右,属于“入门标配”。它的优点是接线简单,不用调电流,新手容易上手;缺点是驱动能力有限,只能带动28BYJ-48这种小扭矩电机。
-
A4988/DRV8825驱动模块:搭配NEMA17步进电机使用,价格10-15块钱。这两款模块性能相近,DRV8825的驱动电流更大,散热更好。需要注意的是,这两款模块需要手动调节电流(通过上面的电位器),电流调小了电机转不动,调大了容易发热烧毁,新手第一次用可以查一下对应电机的额定电流,慢慢调试。
4. 辅助零件:供电、机械结构和连接件(别忽略这些“小细节”)
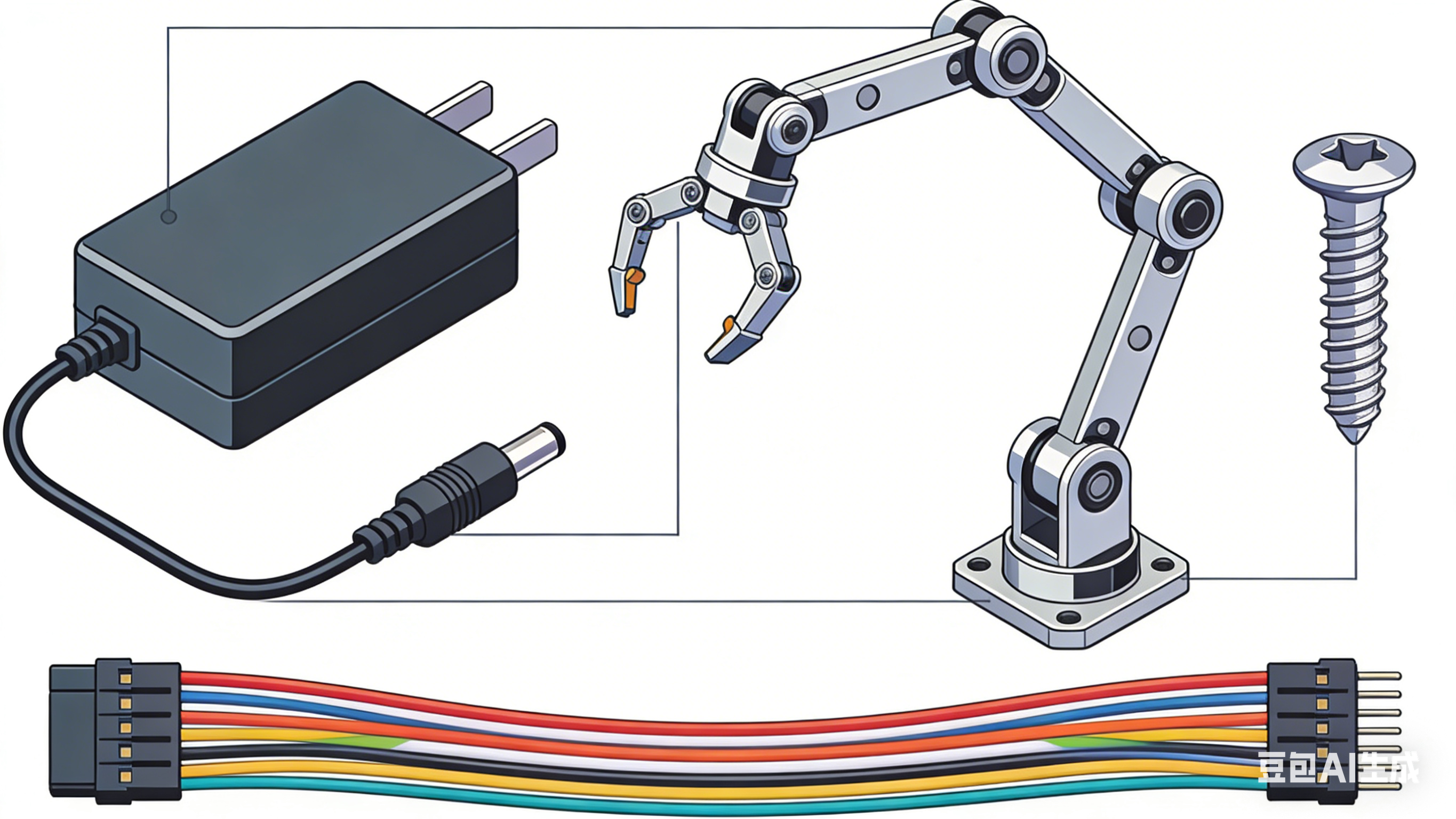
① 供电:这是最容易被新手忽略的“坑”!步进电机转动时需要较大的电流,如果供电不足,会出现“丢步”(转不到指定角度)、“抖动”等问题。28BYJ-48+ULN2003组合,用5V/2A的电源就够了;NEMA17+A4988组合,建议用12V/3A的电源。ESP32可以和驱动模块共用一个电源(注意电压匹配),也可以单独供电,稳定性更好。
② 机械结构:入门级可以买现成的机械臂套件(比如4自由度金属机械臂),价格100-200块,自带舵机/步进电机安装位,不用自己设计零件。如果想自己DIY,也可以用3D打印零件,灵活性更高,但需要有3D打印机。
③ 连接件:杜邦线(公对母、公对公)、螺丝、螺母等,这些小零件虽然便宜,但少了可不行,建议买一套“电子元件工具箱”,里面啥都有,省得用到的时候到处找。
二、软件篇:给大脑植入“运动指令”
硬件凑齐了,接下来就是给ESP32写代码,让它知道“该怎么控制步进电机,让机械臂动起来”。咱们以“ESP32+28BYJ-48+ULN2003”组合为例(新手友好),一步步讲解软件实现过程,严谨但不晦涩,保证你能看懂。
1. 开发环境搭建:给ESP32装“操作系统”
咱们用最主流的Arduino IDE来写代码,搭建环境的步骤很简单,跟着做就行:
-
下载并安装Arduino IDE(官网直接搜,免费);
-
给Arduino IDE添加ESP32开发板支持:打开IDE,文件→首选项→附加开发板管理器网址,输入“https://dl.espressif.com/dl/package_esp32_index.json”,点击确定;
-
打开开发板管理器(工具→开发板→开发板管理器),搜索“ESP32”,安装最新版本(可能需要等几分钟,看网速);
-
连接ESP32开发板到电脑,选择对应的开发板(Tools→Board→ESP32 Arduino→ESP32 Dev Module)和端口(Tools→Port,Windows看设备管理器,Mac看串口)。
这里提醒一句:如果连接后找不到端口,大概率是没装CH340驱动(ESP32开发板常用的USB转串口芯片),网上搜“CH340驱动”下载安装,重启电脑就行,别慌!
2. 代码核心:用库简化开发(别重复造轮子)
控制步进电机不用自己写复杂的时序代码,Arduino IDE有现成的库可以用,比如“Stepper.h”库(适合28BYJ-48),或者“AccelStepper.h”库(支持加速减速,适合精准控制)。
以“Stepper.h”库为例,给大家贴一段基础代码(带注释,一看就懂):
#include <Stepper.h>
// 定义步进电机的步数(28BYJ-48默认是512步/圈,减速比1:64,实际是512/64=8步/圈)
const int stepsPerRevolution = 512;
// 定义连接ULN2003驱动板的4个IO口(随便选ESP32的4个数字IO口,这里用2、4、5、13)
Stepper myStepper(stepsPerRevolution, 2, 4, 5, 13);
void setup() {
// 设置电机转速(单位:转/分钟,28BYJ-48转速别太高,不然容易丢步)
myStepper.setSpeed(10);
// 初始化串口(用于调试,看电机转动状态)
Serial.begin(115200);
}
void loop() {
// 让电机顺时针转一圈
Serial.println("顺时针转一圈");
myStepper.step(stepsPerRevolution);
delay(1000); // 暂停1秒
// 让电机逆时针转一圈
Serial.println("逆时针转一圈");
myStepper.step(-stepsPerRevolution);
delay(1000); // 暂停1秒
}
代码解释:这段代码的功能很简单,让28BYJ-48步进电机顺时针转一圈,暂停1秒,再逆时针转一圈,循环往复。通过串口监视器(波特率115200)可以看到调试信息,方便排查问题。
3. 进阶玩法:多自由度机械臂控制(从“单关节”到“多关节”)
如果是4自由度机械臂(比如底座、大臂、小臂、夹爪各一个步进电机),只需要给每个电机分配不同的IO口,然后分别初始化和控制就行。比如用4个28BYJ-48电机,就需要4个ULN2003驱动板,分别连接ESP32的不同IO口,然后在代码中定义4个Stepper对象,分别控制每个关节的运动。
这里给大家一个小技巧:可以把每个关节的运动封装成函数,比如“baseTurn(int steps)”(底座转动)、“armUp(int steps)”(大臂抬起),这样代码更简洁,后期调试和修改也方便。如果想实现更复杂的动作(比如让机械臂夹取某个物体),只需要组合这些函数,控制每个关节转动的角度和顺序就行。
进阶提醒:如果用NEMA17电机,建议用“AccelStepper.h”库,它支持加速和减速功能,能避免电机启动和停止时的“抖动”,让机械臂运动更平稳。代码思路和“Stepper.h”库类似,只是初始化和控制函数略有不同,网上有很多现成的示例代码,大家可以参考。
三、常见坑和避坑指南(新手必看,少走弯路)

折腾电子设备,遇到问题很正常,关键是知道怎么解决。这里总结了几个新手最容易遇到的坑,以及对应的解决方法,帮你快速“排雷”。
-
坑1:电机不转:首先检查接线(驱动模块和电机、ESP32和驱动模块是否接对);然后检查供电(电源电压和电流是否足够);最后看代码(IO口是否选对,库是否正确导入)。
-
坑2:电机转得乱七八糟,丢步:大概率是供电不足(换更大电流的电源),或者转速太高(降低myStepper.setSpeed()的值);如果是NEMA17电机,可能是驱动模块的电流没调好(用螺丝刀调节电位器,慢慢调试)。
-
坑3:ESP32上传代码失败:检查端口是否选对,驱动是否安装;如果是Windows系统,可能需要关闭串口助手再上传;如果还是失败,换一根USB线试试(有些廉价USB线接触不好)。
-
坑4:机械臂运动不精准:除了电机和驱动的问题,还要检查机械结构(比如关节是否松动,螺丝是否拧紧),机械结构松动也会导致“走位不准”。
四、总结:从“折腾”到“玩转”的必经之路
用ESP32驱动步进电机控制机械臂,本质上是“硬件选型+软件编程+机械调试”的结合。新手不用害怕,从最简单的“单电机转动”开始,一步步熟悉硬件接线和代码逻辑,再慢慢升级到多自由度机械臂的控制,过程虽然可能会遇到一些小挫折,但当你看到自己组装的机械臂精准地完成夹取、转动等动作时,那种成就感绝对是无可替代的。
最后,给大家一个小建议:多动手、多查资料,遇到问题别轻易放弃。电子圈的很多大神,都是从“折腾”各种零件开始的。如果你在实践过程中有新的发现,或者遇到了解决不了的问题,欢迎在评论区留言交流,咱们一起探讨!
好了,今天的博客就到这里。祝大家都能顺利玩转ESP32和机械臂,早日实现自己的“机器人梦想”!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









