









问题描述
在使用览沃 ROS 驱动程序过程中,之前通过源码编译再运行,一直正常使用,突然有一天出现编译正常,但是运行报错异常退出的情况,即,运行完
source devel/setup.bash
roslaunch livox_ros_driver livox_lidar_rviz.launch
后出现如下错误信息并退出:
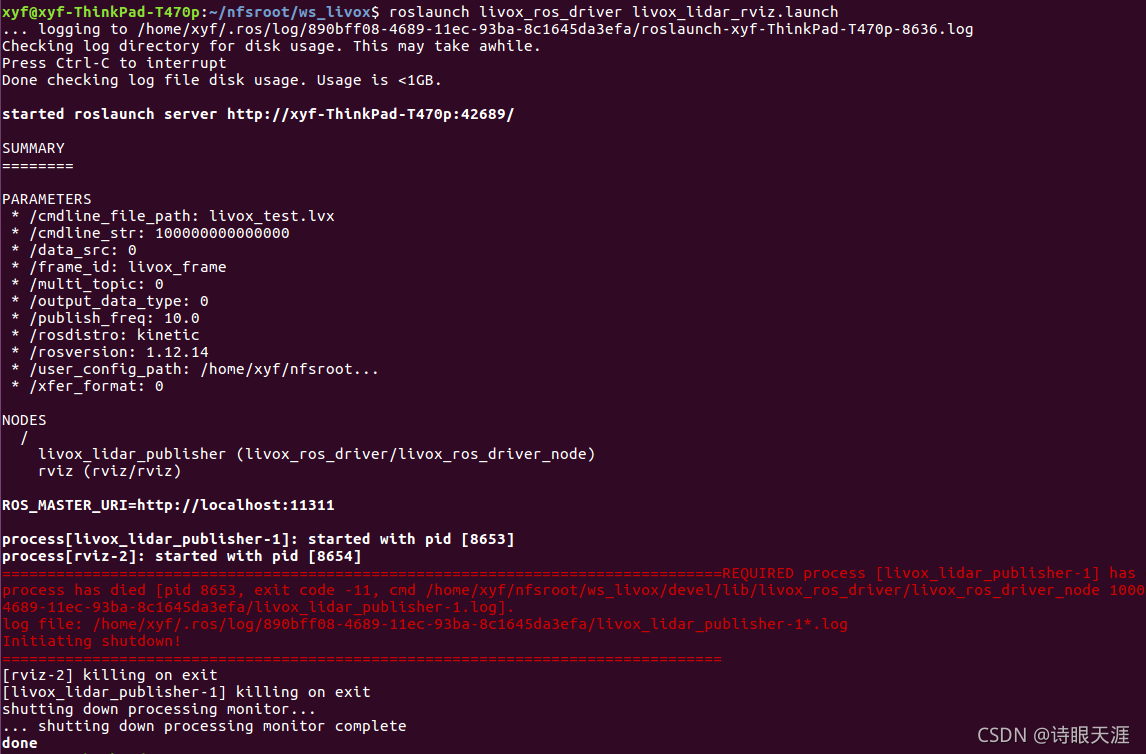
对比了官方驱动源码,发现没有影响到运行报错的地方。
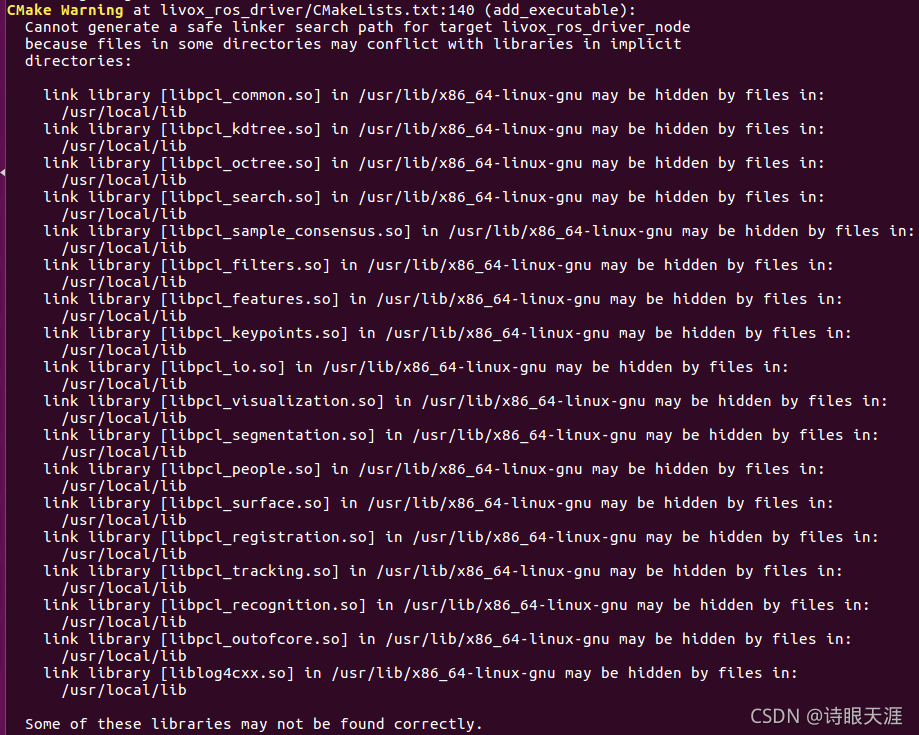
原因分析:
经过各种查资料并动手验证,最终发现是PCL版本冲突的原因,即本地主机环境中安装了多个PCL版本冲突,比如,我的/usr/livx86_64-linux-gnu目录下已经安装了PCL 1.7的版本,但是同时又在/usr/local/lib目录下安装了PCL1.9的版本,导致链接过程总出现了冲突。
解决办法:
目前的解决办法是删除PCL1.9的安装文件,
sudo rm -r /usr/include/pcl-1.9 /usr/local/share/pcl-1.9 /usr/local/lib/libpcl*
删除后重新编译,可以正常运行。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











