




bandpass_image — Edge extraction using bandpass filters。文档解释:使用带通滤波器的边缘提取
它的模板是:
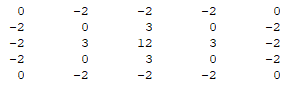
这个模板与Log模板类似:
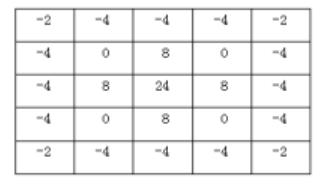
这样理解,bandpass_image算子的原理还是空间的线性边缘提取实现的。带通的概念又是频域内的,不理解哪一步和带通有关系?
 带通滤波器边缘提取
带通滤波器边缘提取
 本文探讨了bandpass_image算子的原理,该算子采用空间线性边缘提取技术,与Log模板相似,实现边缘检测。尽管其概念源于频域,但具体实施在于空间域的边缘识别。
本文探讨了bandpass_image算子的原理,该算子采用空间线性边缘提取技术,与Log模板相似,实现边缘检测。尽管其概念源于频域,但具体实施在于空间域的边缘识别。
bandpass_image — Edge extraction using bandpass filters。文档解释:使用带通滤波器的边缘提取
它的模板是:
这个模板与Log模板类似:
这样理解,bandpass_image算子的原理还是空间的线性边缘提取实现的。带通的概念又是频域内的,不理解哪一步和带通有关系?
 2541
2402
1121
633
2541
2402
1121
633

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























