







系列篇章💥
目录
前言
在人工智能领域,视觉语言动作(Vision-Language-Action,VLA)模型正逐渐成为连接人类语言与机器人动作的关键技术。随着机器人技术的不断发展,如何让机器人更好地理解人类语言指令,并将其转化为精确的动作,成为了研究的热点。近期,斯坦福大学等机构的研究团队开源了 OpenVLA 模型,这一模型以其高效的参数利用和卓越的性能,为机器人技术的发展带来了新的希望。本文将详细介绍 OpenVLA 的项目背景、技术原理、功能特点、应用场景以及如何快速上手使用,帮助读者全面了解这一前沿技术。
一、项目概述
OpenVLA 由斯坦福大学等机构的研究团队开发。这些团队在人工智能、机器人技术和机器学习领域拥有深厚的技术积累和丰富的研究经验。通过跨学科的合作,他们汇聚了多方面的专业人才,共同攻克了视觉语言动作模型中的诸多难题。
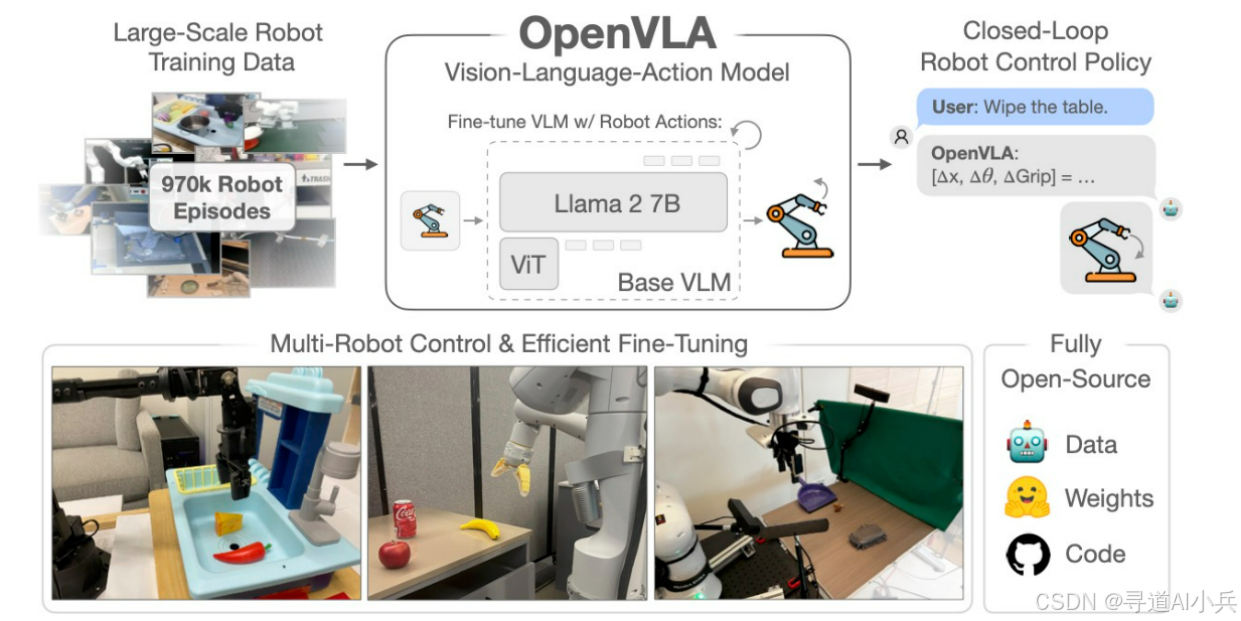
OpenVLA 项目致力于构建一个开源的视觉语言动作模型体系。其核心思路是借助预训练的大型模型架构,融合互联网规模的海量视觉语言数据以及多样化的机器人实际演示数据,以此赋能机器人快速掌握新技能。项目的核心目标聚焦于通过参数高效的微调策略,使机器人能够迅速适应全新任务与复杂多变的环境,进而显著提升机器人的泛化能力与整体性能表现,推动机器人从单一任务执行向复杂场景灵活应对的方向迈进。
二、技术原理
(一)模型结构
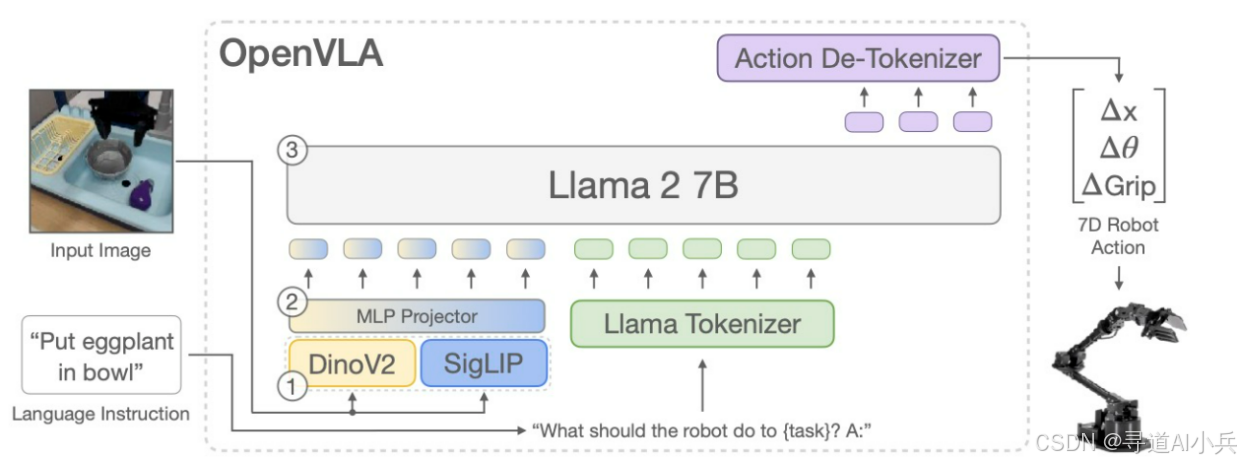
OpenVLA 基于一个 7B 参数的 Llama 2 语言模型,并结合了融合 DINOv2 和 SigLIP 预训练特征的视觉编码器。这种结构使得模型能够更好地处理视觉和语言信息,从而生成更准确的机器人动作。具体来说,视觉编码器负责处理输入的图像数据,提取视觉特征;语言模型则负责处理自然语言指令,理解指令的语义。两者结合后,模型能够将语言指令转化为具体的机器人动作。
(二)训练数据
OpenVLA 在 Open X-Embodiment 数据集的 97 万个真实世界机器人演示上进行了训练。这些数据涵盖了多种任务和场景,为模型提供了丰富的学习资源。通过在大规模数据集上进行训练,OpenVLA 能够学习到不同任务的通用特征,从而提高其泛化能力。
(三)训练方法
OpenVLA 采用了参数高效的微调方法,使得模型能够快速适应新的机器人领域。这种微调方法不仅提高了模型的适应性,还减少了训练时间和计算资源的需求。此外,OpenVLA 还支持在消费级 GPU 上进行微调,并通过量化实现高效服务。
三、功能特点
(一)高效性
与现有的封闭模型(如 RT-2-X,55B 参数)相比,OpenVLA 在 29 个任务和多个机器人实施例中的绝对任务成功率高出 16.5%,同时参数数量减少了 7 倍。这表明 OpenVLA 在保持高效性的同时,还具有更强的泛化能力和性能。
。
(二)强大的泛化能力
OpenVLA 在涉及多个对象和强语言基础能力的多任务环境中表现出色。这表明该模型不仅能够处理单一任务,还能在复杂的多任务场景中保持高性能。
(三)开源性
OpenVLA 的模型检查点、微调笔记本和 PyTorch 训练管道都是完全开源的。这意味着研究人员和开发者可以自由访问和使用这些资源,从而加速机器人技术的发展。
四、应用场景
(一)家庭服务机器人
在家庭环境中,OpenVLA 能够显著提升服务机器人的智能化水平。机器人可以精准理解用户的语音指令,如 “打扫卧室地面,清理沙发上的杂物”,借助 OpenVLA 强大的视觉与语言处理能力,识别卧室边界、地面区域、沙发及杂物,规划合理的清洁路径,准确执行清扫、整理动作,为用户打造更加便捷、舒适的家居生活体验。
(二)工业机器人
工业生产线上,OpenVLA 助力机器人快速适应新产品、新工艺的生产需求。当引入新的零部件装配任务时,通过参数高效的微调,机器人能够迅速理解装配流程的语言描述,结合视觉识别零部件特征与位置,快速上手新任务,极大缩短生产线调整周期,提高生产效率与灵活性,为工业企业应对快速变化的市场需求提供有力支持。
(三)教育与研究
OpenVLA 的开源特性使其成为教育与研究领域的理想工具。在高校相关课程教学中,学生可以基于 OpenVLA 的模型资源,开展机器人视觉语言交互、动作规划等实验,加深对机器人技术的理解与实践能力。科研人员更是能够利用其模型检查点和训练管道,探索机器人在医疗康复、灾难救援等新兴领域的应用,推动机器人技术边界的不断拓展。
五、快速使用
(一)环境准备
在开始之前,请确保您已经安装了以下必要的软件和库:
- Python 3.10(推荐版本)
- PyTorch 2.2.0
- OpenVLA 代码库
(二)安装依赖
- 创建 Python 环境并安装 PyTorch:
conda create -n openvla python=3.10 -y
conda activate openvla
conda install pytorch torchvision torchaudio pytorch-cuda=12.4 -c pytorch -c nvidia -y
- 安装 OpenVLA 代码库:
git clone https://github.com/openvla/openvla.git
cd openvla
pip install -e .
- 安装 Flash Attention 2(用于训练):
pip install packaging ninja
ninja --version; echo $? # Verify Ninja --> should return exit code "0"
pip install "flash-attn==2.5.5" --no-build-isolation
(三)代码示例
以下是加载 openvla-7b 模型进行零样本指令跟随的示例代码:
from transformers import AutoModelForVision2Seq, AutoProcessor
from PIL import Image
import torch
# Load Processor & VLA
processor = AutoProcessor.from_pretrained("openvla/openvla-7b", trust_remote_code=True)
vla = AutoModelForVision2Seq.from_pretrained(
"openvla/openvla-7b",
attn_implementation="flash_attention_2", # [Optional] Requires `flash_attn`
torch_dtype=torch.bfloat16,
low_cpu_mem_usage=True,
trust_remote_code=True
).to("cuda:0")
# Grab image input & format prompt
image: Image.Image = get_from_camera(...) # Replace with your image input
prompt = "In: What action should the robot take to {<INSTRUCTION>}?\nOut:"
# Predict Action (7-DoF; un-normalize for BridgeData V2)
inputs = processor(prompt, image).to("cuda:0", dtype=torch.bfloat16)
action = vla.predict_action(**inputs, unnorm_key="bridge_orig", do_sample=False)
# Execute...
robot.act(action, ...) # Replace with your robot execution code
注:具体信息请参考OpenVLA GitHub 仓库(https://github.com/openvla/openvla)
六、结语
OpenVLA 作为斯坦福大学等机构开源的视觉语言动作模型,以其高效的参数利用和卓越的性能,为机器人技术的发展带来了新的希望。通过预训练的大型模型和大规模数据集的训练,OpenVLA 能够快速适应新的任务和环境,提高机器人的泛化能力。同时,其开源性也为研究人员和开发者提供了丰富的资源,加速了机器人技术的发展。随着技术的不断进步,OpenVLA 有望在家庭服务、工业生产、教育研究等多个领域发挥重要作用,为人类的生活和工作带来更多的便利。
七、相关资源
- 论文地址:https://arxiv.org/abs/2406.09246
- 项目主页:https://openvla.github.io/
- 代码仓库:https://github.com/OpenVLA/OpenVLA

🎯🔖更多专栏系列文章:AI大模型提示工程完全指南、AI大模型探索之路(零基础入门)、AI大模型预训练微调进阶、AI大模型开源精选实践、AI大模型RAG应用探索实践🔥🔥🔥 其他专栏可以查看博客主页📑
😎 作者介绍:资深程序老猿,从业10年+、互联网系统架构师,目前专注于AIGC的探索(优快云博客之星|AIGC领域优质创作者)
📖专属社群:欢迎关注【小兵的AI视界】公众号或扫描下方👇二维码,回复‘入群’ 即刻上车,获取邀请链接。
💘领取三大专属福利:1️⃣免费赠送AI+编程📚500本,2️⃣AI技术教程副业资料1套,3️⃣DeepSeek资料教程1套🔥(限前500人)
如果文章内容对您有所触动,别忘了点赞、⭐关注,收藏!加入我们,一起携手同行AI的探索之旅,开启智能时代的大门!


















 1581
1581

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











