




1. 总结
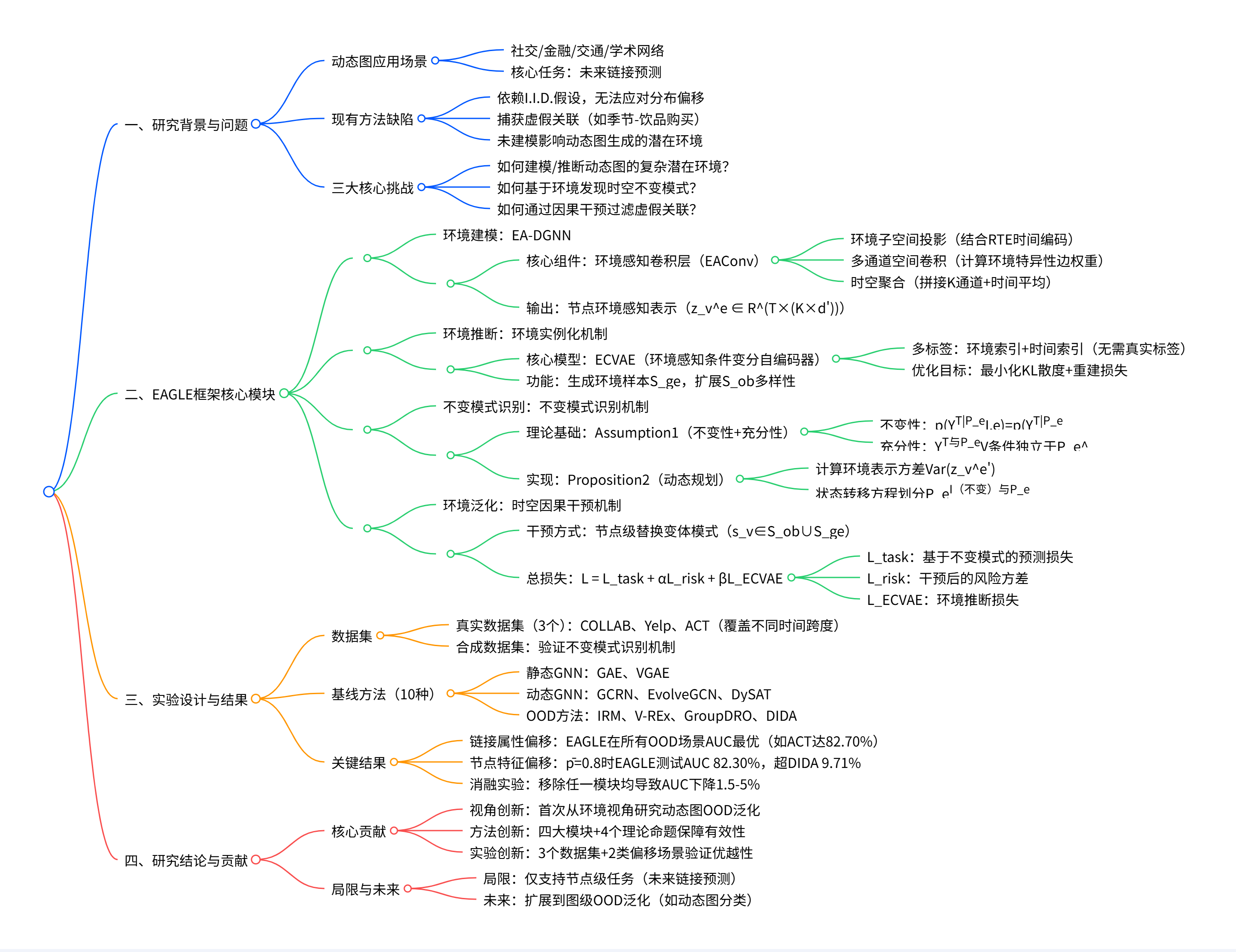
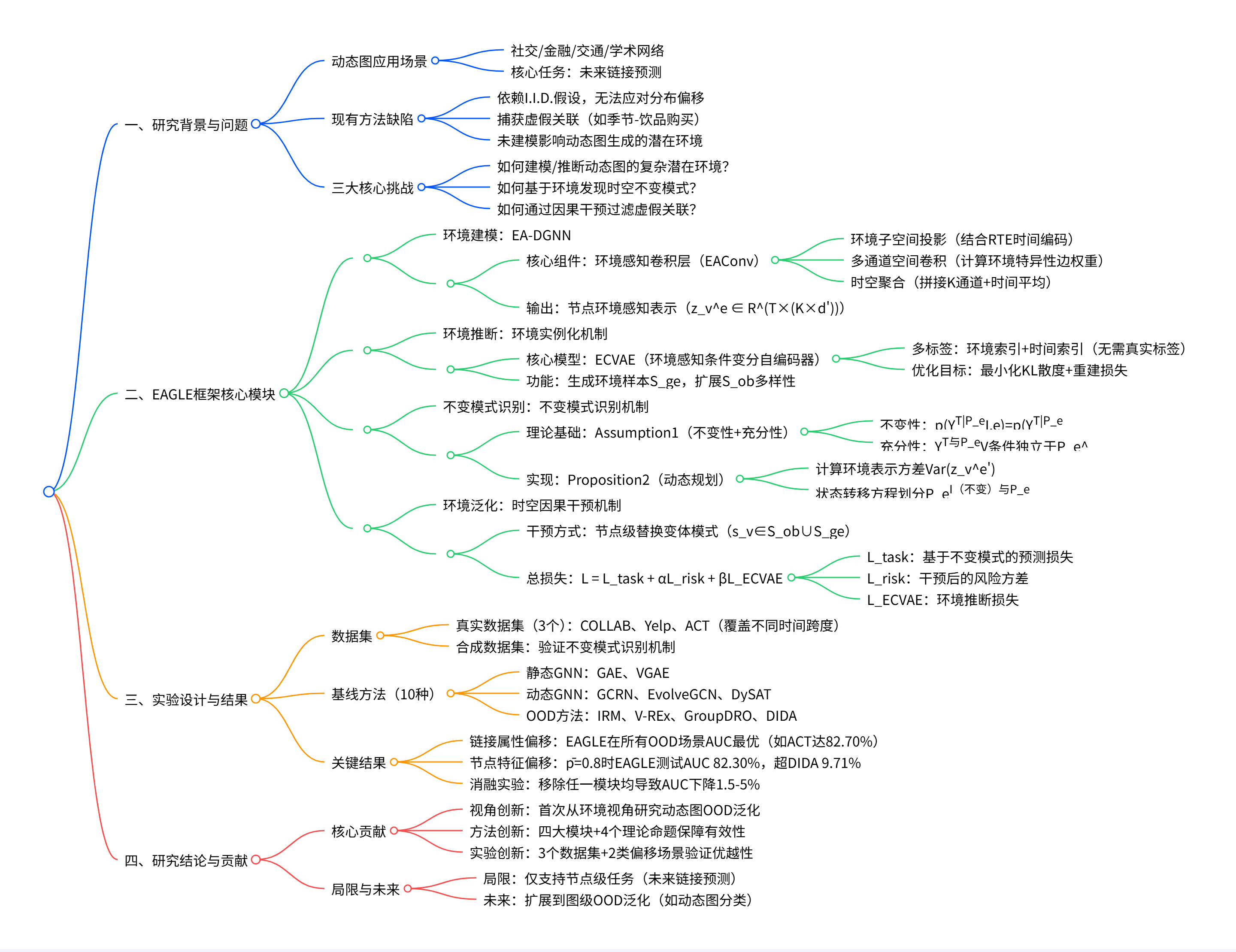
Environment-Aware dynamic Graph LEarning(EAGLE)框架,首次从环境学习视角解决动态图的分布外(OOD)泛化问题。针对现有动态图神经网络(DGNNs)依赖I.I.D.假设、易捕获虚假关联的缺陷,EAGLE通过四大核心模块实现OOD泛化:
1)环境感知EA-DGNN,基于多通道环境解纠缠建模潜在环境(如学术网络的“研究领域”、社交网络的“关系类型”);
2)环境实例化机制,结合多标签变分自编码器(ECVAE)生成多样化环境样本,弥补训练环境覆盖不足;
3)不变模式识别机制,通过动态规划(Proposition2)实现节点级时空不变模式划分,满足“不变性+充分性”理论条件;
4)时空因果干预机制,基于观测与生成样本进行节点级细粒度干预,最小化经验风险与不变风险。在COLLAB(16年学术合作)、Yelp(24个月用户评价)、ACT(30天MOOC行为)三个真实数据集的未来链接预测任务中,EAGLE在链接属性偏移、节点特征偏移场景下均显著优于静态GNN(GAE、VGAE)、动态GNN(EvolveGCN、DySAT)及OOD方法(IRM、DIDA),例如COLLAB的OOD场景AUC达84.41%,超越DIDA的81.87%,验证了其泛化能力。
2. 思维导图(mindmap)
3. 详细总结
EAGLE框架:动态图分布外(OOD)泛化的详细总结
1. 研究背景与核心问题
1.1 动态图的重要性与应用
动态图(定义为 DG=Gtt=1TDG = {G^t}_{t=1}^TDG=Gtt=1T,含T个离散快照)是现实场景的重要数据形式,典型应用包括:
- 学术合作网络(COLLAB):节点为作者,边为合作关系,时间跨度16年(1990-2006),含5类边属性(如“数据挖掘”“理论”);
- 用户评价网络(Yelp):节点为用户/商家,边为评价行为,时间跨度24个月(2019-2020),含5类商家类别(如“披萨”“咖啡”);
- 在线学习行为网络(ACT):节点为学生/学习目标,边为交互行为,时间跨度30天,含5类行为聚类属性。
核心任务为未来链接预测:基于历史快照G^1:T,训练模型fθ=w∘gf_θ = w∘gfθ=w∘g(w为DGNN编码器,ggg为链接预测器),预测T+1时刻边的存在性(YTY^TYT)。
1.2 现有方法的关键缺陷
| 缺陷类型 | 具体表现 | 示例 |
|---|---|---|
| 依赖I.I.D.假设 | 训练与测试数据需同分布,真实场景中分布偏移普遍存在 | 季节变化导致用户饮品购买偏好改变,模型预测失效 |
| 捕获虚假关联 | 时空卷积会强化非因果关联,降低OOD泛化能力 | 模型误将“冰美式-寒冷季节”的虚假关联作为预测依据 |
| 忽略潜在环境 | 动态图生成受多环境因素影响,但未建模这些因素 | 学术网络中“研究领域”影响合作关系,模型未区分不同领域 |
1.3 OOD泛化的三大核心挑战
- 环境建模与推断:动态图的潜在环境(如“研究领域”“季节”)随时间变化且相互耦合,如何有效建模并推断其分布?
- 不变模式发现:如何从推断的环境中,提取跨环境稳定的时空不变模式(如“用户购买咖啡”的核心需求),过滤变体模式(如“冰饮偏好”)?
- 因果干预:如何通过干预变体模式,消除虚假关联,确保模型在未见过的OOD环境中泛化?
2. 问题定义
2.1 动态图学习基础符号
| 符号 | 含义 | 维度/类型 |
|---|---|---|
| Gt=(Vt,Et)G^t = (V^t, E^t)Gt=(Vt,Et) | t时刻图快照 | - |
| AtA^t At | t时刻邻接矩阵 | 0,1N×N{0,1}^{N×N}0,1N×N, ( N=VtN=V^tN=Vt ) |
| Xt X^tXt | t时刻节点特征矩阵 | RN×dR^{N×d}RN×d(ddd为特征维度) |
| fθ f_θfθ | 预测模型(w∘g) | 输入G1:TG^1:TG1:T,输出 Y^TŶ^TY^T |
| eee | 潜在环境变量 | 离散/连续(如研究领域、季节) |
| EEE | 环境支撑集 | 训练环境Etrain⊆E_{train} ⊆Etrain⊆测试环境EtestE_{test}Etest |
2.2 OOD泛化的目标函数
- 传统ERM目标(依赖I.I.D.假设,公式1):
minθE(G1:T,YT)∼p(G1:T,YT)[ℓ(fθ(G1:T),YT)]min _{\theta} \mathbb{E}_{\left(\mathcal{G}^{1: T}, Y^{T}\right) \sim p\left(G^{1: T}, Y^{T}\right)}\left[\ell\left(f_{\theta}\left(\mathcal{G}^{1: T}\right), Y^{T}\right)\right]minθE(G1:T,YT)∼p(G1:T,YT)[ℓ(fθ(G1:T),YT)] - OOD泛化目标(最小化最坏环境风险,公式2):
minθmaxe∈EE(G1:T,YT)∼p(G1:T,YT∣e)[ℓ(fθ(G1:T),YT)∣e]min_{\theta }max_{e\in E}\mathbb {E}_{\left( \mathcal {G}^{1:T},Y^{T}\right) \sim p(G^{1:T},Y^{T}| e)}\left[ \ell \left( f_{\theta }\left( \mathcal {G}^{1:T}\right) ,Y^{T}\right) | e\right]minθmaxe∈EE(G1:T,YT)∼p(G1:T,YT∣e)[ℓ(fθ(G1:T),YT)∣e]
核心挑战:环境eee不可观测,且EtrainE_{train}Etrain无法覆盖所有EtestE_{test}Etest。
3. EAGLE框架的四大核心模块
EAGLE遵循“环境建模→环境推断→不变模式识别→环境泛化”的闭环范式,各模块设计如下:
3.1 模块1:环境建模——环境感知DGNN(EA-DGNN)
3.1.1 核心设计:多通道环境解纠缠
目标:将节点的时空表示分解到K个环境子空间,区分不同潜在环境的影响(如学术网络的K个研究领域)。
3.1.2 关键组件:环境感知卷积层(EAConv)
遵循“空间优先、时间其次”的卷积范式,分三步实现:
- 环境子空间投影(公式3):将节点特征结合相对时间编码(RTE(t)),投影到K个环境子空间:
zv,kt=σ(Wk⊤(xvt⊕RTE(t))+bk)z_{v, k}^{t}=\sigma\left(W_{k}^{\top}\left(x_{v}^{t} \oplus RTE(t)\right)+b_{k}\right)zv,kt=σ(Wk⊤
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 333
333

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









