









IEEE Transactions on Transportation Electrification上的一篇论文《A wide speed range sensorless control for threephase PMSMs based on a high-dynamic backEMF observer》介绍了一种简单的无位置传感器控制方法。
根据下式PMSM在两相静止坐标系上的数学模型:

可以推导出稳态时的情形:
![]()
根据上式稳态下的数学模型就可以构建反电动势观测器,如下:
![]()
上式是复矢量形式的表达式,写成矩阵形式是下面这样
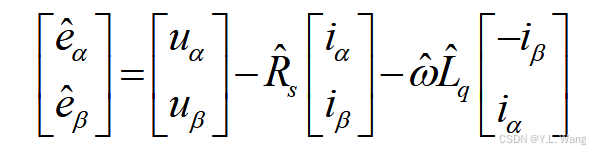
对无位置传感器控制有所耳闻的都知道:反电动势中含有转子位置和转速信息。根据反电动势提取转子位置和转速,然后用来实现无位置传感器情况下的FOC是最常见的无位置传感器控制思路。该论文使用正交锁相环提取转子位置信息,并且构建该反电动势观测器也需要转速估计值。相应的无位置传感器控制方法整体框图如图1所示。
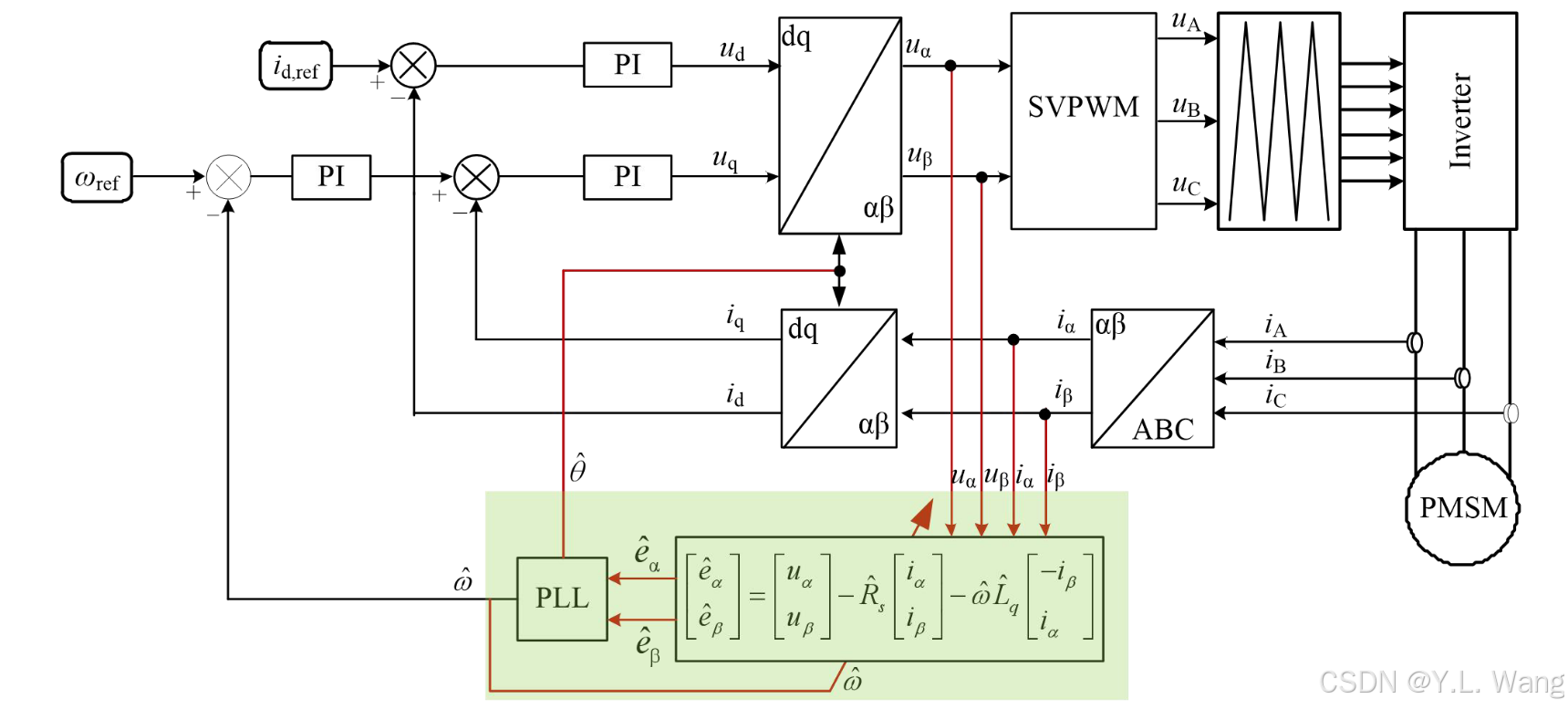
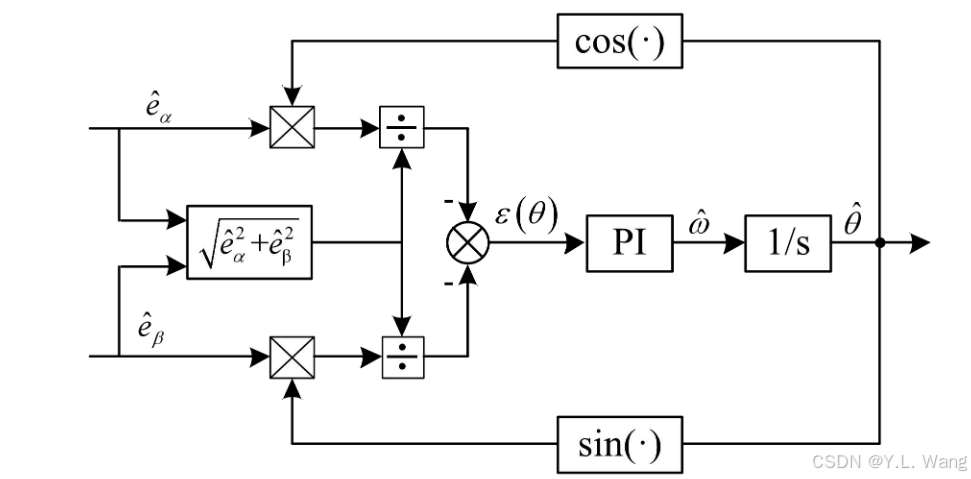
其中,PLL结构图如图2所示,就是常见的归一化的正交锁相环,PLL用来从反电动势中提取转子位置和转速信息,在无位置传感器控制方法中很常见、很基础。当然你也可以使用其他改进过的PLL,或者其他观测器用来从反电动势中提取转子位置和转速。
该论文中的无位置观测方法很简单,在实验室PMSM平台上进行了简单的验证实验,电机的极对数P=4,部分实验结果的 示波器截图如下:
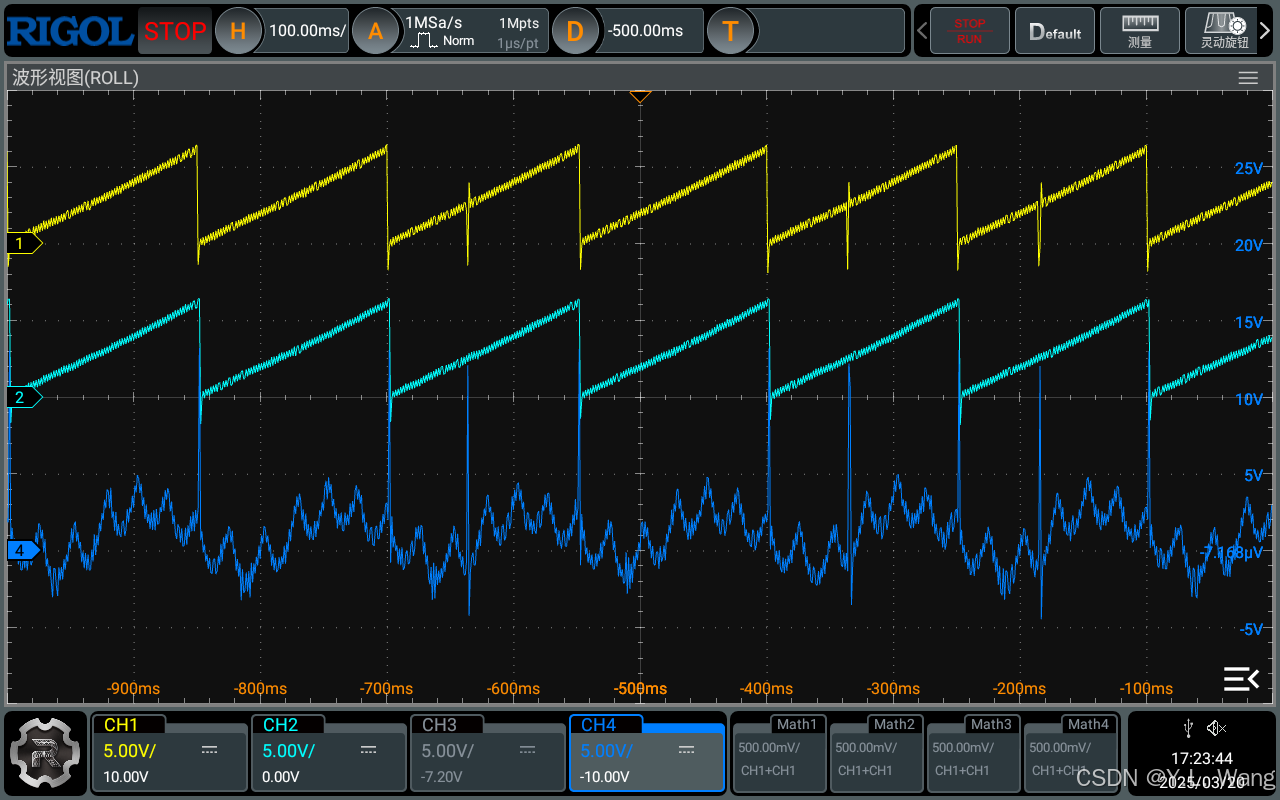
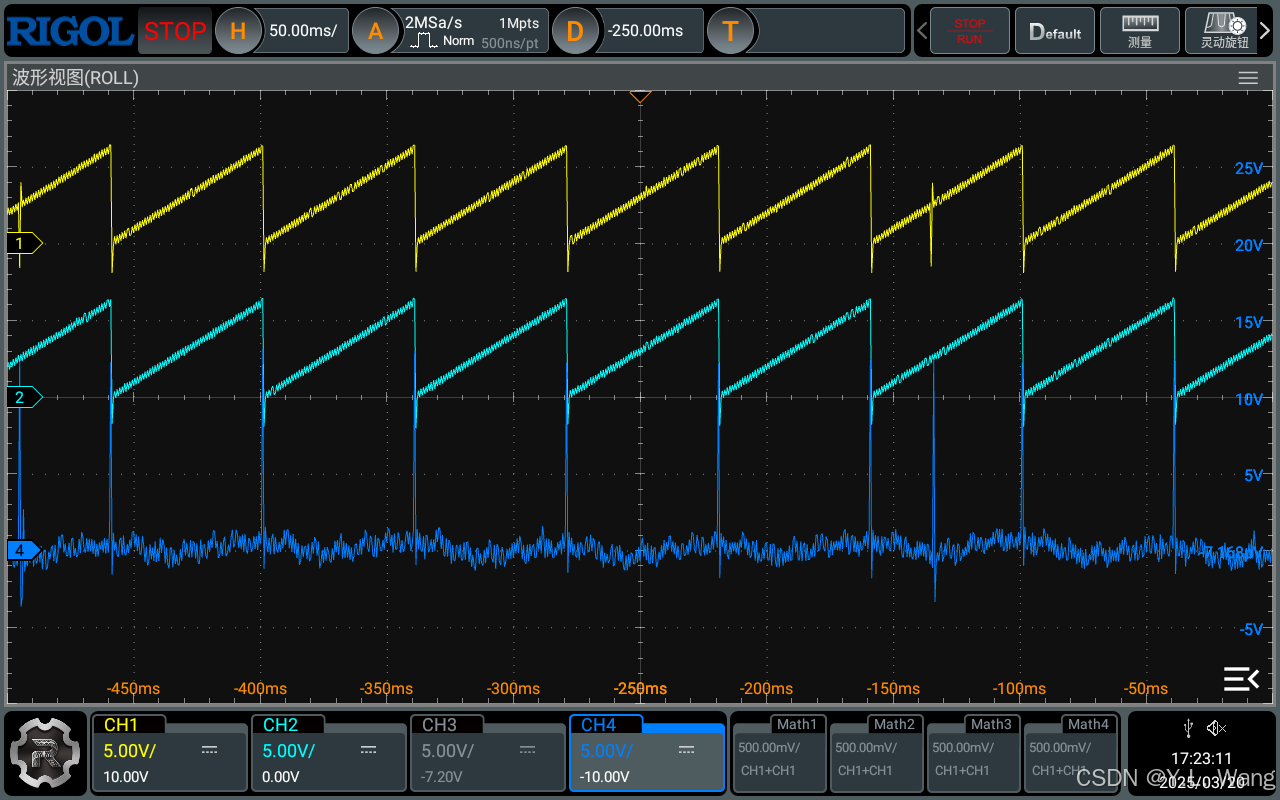

图3、4、5是转子实际位置、转子估计位置和相应的估计误差,注意由于转速不同时电机负载(主要是摩擦转矩)差异较大,而在特定的参数偏差下,基于电机基波数学模型的无位置控制的位置估计误差与q轴电流iq成正比,因此位置观测误差在500rpm时反而较大。
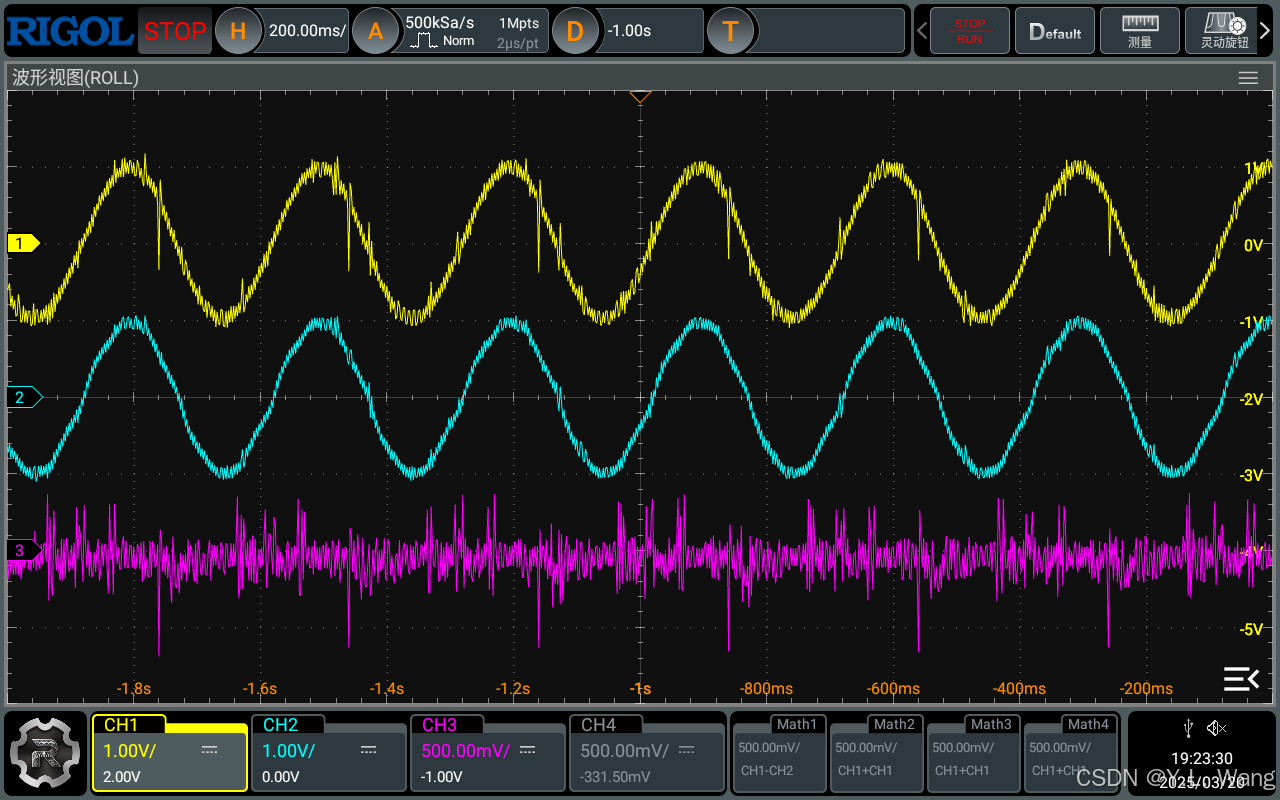
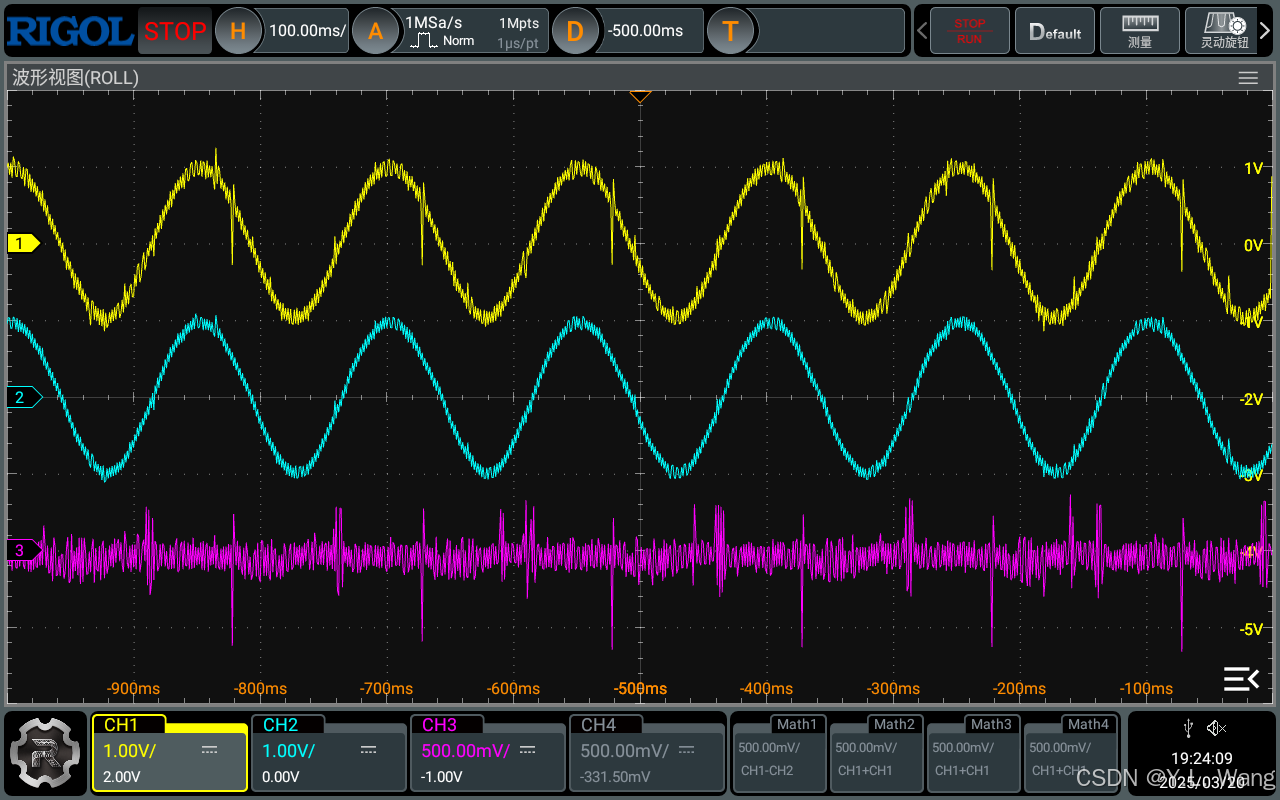
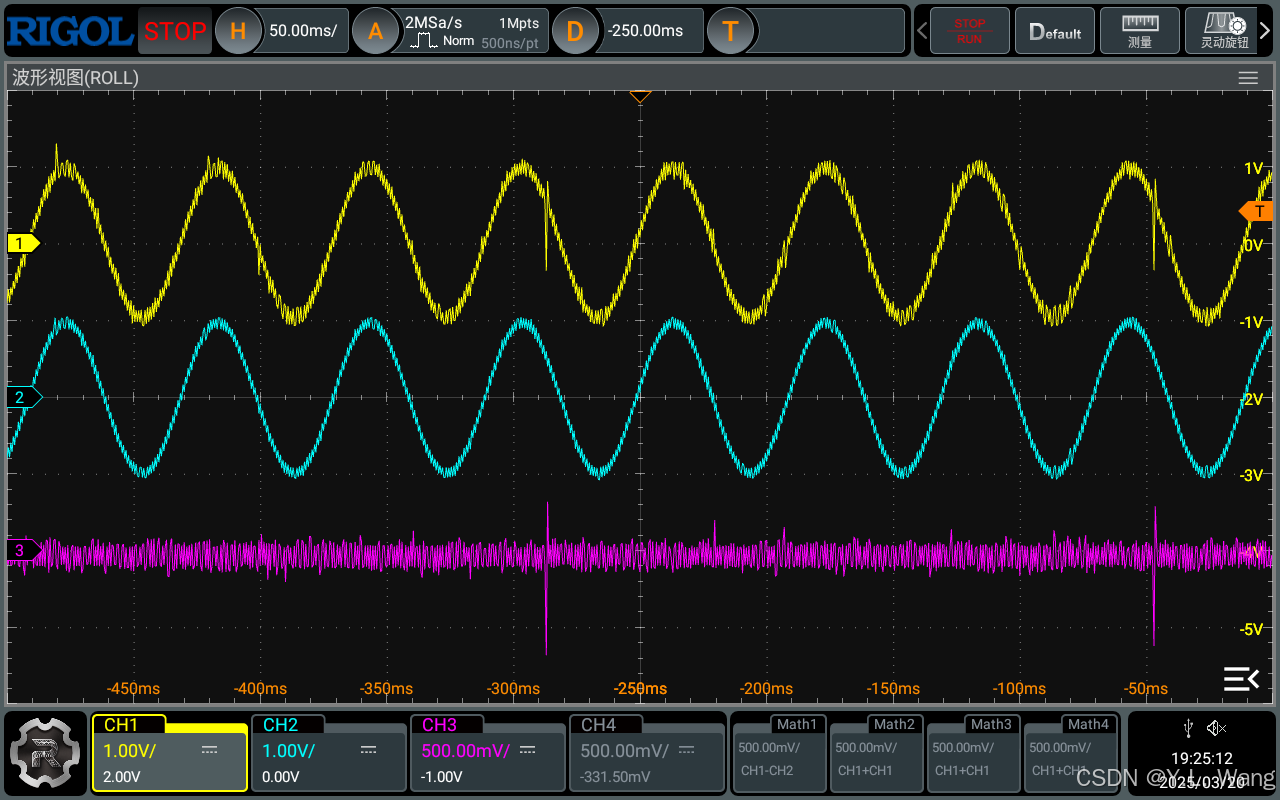

图6-9分别是50rpm、100rpm、250rpm、500rpm时eα的实际值和观测值,以及二者的差值。值得注意的是,上述给出的反电动势波形都是“归一化”后的,这是因为归一化后反电动势的幅值不再随转速变化,不同转速的反电动势波形都是1,仅仅是频率不一样,可以保证PLL的带宽不随转速变化而变化。
从图6-9可以看出,随着转速的升高,反电动势观测量越“光滑”,越接近正弦。当转速为50rpm时,观测的反电动势波形可以明显看出不是正弦形状,这是因为转速较低时逆变器非线性等因素的影响,因此通过死区补偿算法可以提高基于基波数学模型的无位置控制速域。图10是使用最简单的方波死区补偿算法后,50rpm时的情形。对比图6和图10可以发现,简单的死区补偿可以较为明显改善反电动势观测器的性能。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











