






在移动设备的游戏开发中,传感器数据的应用可以为用户带来更加沉浸和直观的交互体验。本文将详细介绍如何在 Android 平台上调用 IMU(惯性测量单元)数据,实现对推箱子游戏的精准控制。我们将涵盖 IMU 的基础知识、低通滤波算法以及稳定性算法,并在文章末尾附上核心代码,帮助大家快速上手。
一、什么是 IMU?
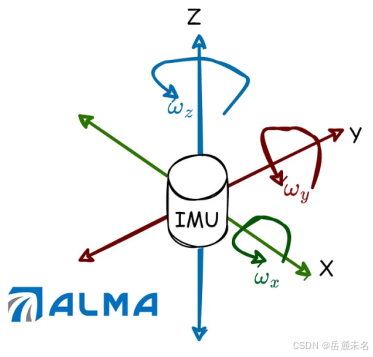
IMU,全称惯性测量单元(Inertial Measurement Unit),是一种用于测量和报告物体的特定力、角速度以及方向的设备。IMU 通常由以下传感器组成:
- 加速度计(Accelerometer):测量设备在三个轴向上的加速度。
- 陀螺仪(Gyroscope):测量设备的角速度,即设备绕各轴的旋转速率。
- 磁力计(Magnetometer):测量地磁场,用于确定设备的绝对方向(方位角)。
1. 加速度计
加速度计可以检测设备在 X、Y、Z 轴上的加速度变化。这对于检测设备的移动、倾斜等动作非常有用。在游戏中,加速度计的数据可以用来判断玩家的手势,从而控制游戏角色的移动方向。
2. 陀螺仪
陀螺仪用于检测设备的旋转角速度,帮助更精确地跟踪设备的旋转状态。虽然本文的推箱子游戏主要依赖加速度计和磁力计,但陀螺仪在需要精确旋转控制的应用中也是不可或缺的。
3. 磁力计
磁力计用于测量地磁场,帮助确定设备的朝向(即方位角)。结合加速度计的数据,可以更准确地计算设备的绝对方向,避免由于加速度计和陀螺仪的漂移问题带来的误差。
二、IMU 在 Android 中的应用
在 Android 开发中,IMU 的应用主要通过 SensorManager 类来实现。开发者可以通过 SensorManager 获取设备的各种传感器,并监听传感器数据的变化,从而实现各种功能。
1. 获取传感器实例
首先,需要获取 SensorManager 的实例,并通过它获取所需的传感器:
SensorManager sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
Sensor accelerometer = sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
Sensor magnetometer = sensorManager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD);
2. 注册传感器监听器
通过实现 SensorEventListener 接口,可以监听传感器数据的变化:
public class MainActivity extends AppCompatActivity implements SensorEventListener {
// ...
@Override
protected void onResume() {
super.onResume();
if (accelerometer != null) {
sensorManager.registerListener(this, accelerometer, SensorManager.SENSOR_DELAY_UI);
}
if (magnetometer != null) {
sensorManager.registerListener(this, magnetometer, SensorManager.SENSOR_DELAY_UI);
}
}
@Override
protected void onPause() {
super.onPause();
sensorManager.unregisterListener(this);
}
@Override
public void onSensorChanged(SensorEvent event) {
// 处理传感器数据
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
// 可根据需要实现
}
// ...
}
3. 处理传感器数据
在 onSensorChanged 方法中,可以获取传感器的数据,并进行相应的处理,例如计算设备的方向、速度等。本文将重点介绍如何利用加速度计和磁力计的数据来确定设备的倾斜方向,从而控制游戏中的角色移动。
三、低通滤波算法详解
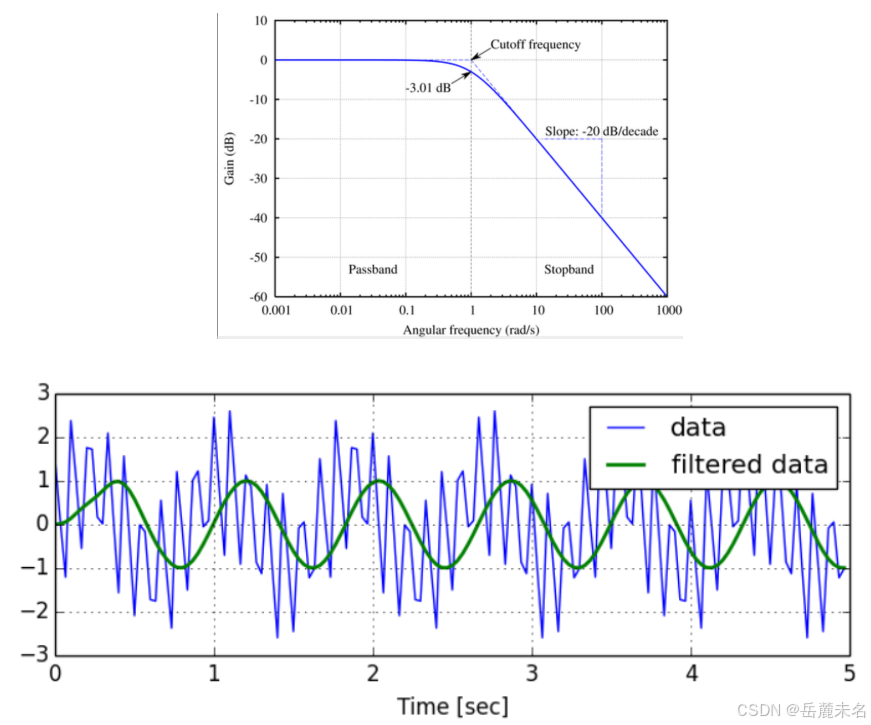
在实际应用中,传感器数据往往包含噪声和高频干扰,这会导致检测到的方向不够稳定。为了解决这个问题,我们需要对传感器数据进行滤波处理。本文采用的是低通滤波算法,其主要作用是平滑数据,减少高频噪声的影响。
1. 低通滤波器原理
低通滤波器通过允许低频信号通过而抑制高频信号,实现对数据的平滑处理。数学表达式如下:
output = output + α * (input - output)
其中,α 是滤波器的系数,取值范围为 0 到 1。α 越小,滤波器的平滑效果越明显,但响应速度也越慢。
2. 低通滤波器的实现
在我们的项目中,低通滤波器的实现如下:
// 低通滤波器参数
private static final float ALPHA = 0.25f;
// 低通滤波器方法
private float[] lowPassFilter(float[] input, float[] output) {
if (output == null) return input;
for (int i = 0; i < input.length; i++) {
output[i] = output[i] + ALPHA * (input[i] - output[i]);
}
return output;
}
3. 应用低通滤波器
在 onSensorChanged 方法中,我们调用该滤波器对加速度计和磁力计的数据进行处理:
@Override
public void onSensorChanged(SensorEvent event) {
if(event.sensor.getType() == Sensor.TYPE_ACCELEROMETER){
gravity = lowPassFilter(event.values.clone(), gravity);
}
if(event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD){
geomagnetic = lowPassFilter(event.values.clone(), geomagnetic);
}
// 进一步处理
}
通过这种方式,我们能够有效地减少传感器数据中的高频噪声,提高数据的稳定性,为后续的方向判定打下良好的基础。
四、稳定性算法详解
即使经过低通滤波处理,设备的倾斜方向仍可能会因细微的移动而频繁变化,导致游戏控制的不稳定。为此,我们引入了稳定性算法,通过多次确认方向变化,确保方向判定的可靠性。
1. 稳定性算法原理
稳定性算法的核心思想是,只有在多次检测到相同的新方向后,才确认方向的变化。这可以有效避免由于偶然的传感器波动导致的误判。
算法步骤如下:
- 方向变化检测:当检测到当前方向与上一次方向不同,进入待确认状态。
- 连续确认:只有在连续多次(例如3次)检测到相同的新方向后,才确认方向的变化。
- 重置计数器:如果在确认前检测到方向回归原方向,重置计数器。
2. 代码实现
相关变量和常量的定义:
// 稳定性参数
private String lastDirection = "";
private String pendingDirection = "";
private int directionChangeCounter = 0;
private static final int STABLE_THRESHOLD = 3; // 连续3次确认方向
在 onSensorChanged 方法中,加入稳定性检测逻辑:
// 检查方向是否变化
if(!currentDirection.equals(lastDirection)){
if(currentDirection.equals(pendingDirection)){
directionChangeCounter++;
if(directionChangeCounter >= STABLE_THRESHOLD){
// 确认方向变化
handleDirectionChange(currentDirection);
lastDirection = currentDirection;
directionChangeCounter = 0;
pendingDirection = "";
}
} else {
// 新方向,开始计数
pendingDirection = currentDirection;
directionChangeCounter = 1;
}
} else {
// 方向未变化,重置计数器
pendingDirection = "";
directionChangeCounter = 0;
}
通过这种方式,我们确保只有在设备方向稳定变化后,才会触发游戏角色的移动,提升用户体验。
五、核心代码解析
以下是本文实现的 IMU 核心代码,涵盖传感器初始化、数据处理、低通滤波和稳定性算法。请参考并集成到您的项目中,以实现更加稳定和精准的游戏控制。
package com.llw.xfasrdemo;
import androidx.appcompat.app.AppCompatActivity;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.widget.TextView;
public class MainActivity extends AppCompatActivity implements SensorEventListener {
// 传感器相关变量
private SensorManager sensorManager;
private Sensor accelerometer;
private Sensor magnetometer;
private float[] gravity;
private float[] geomagnetic;
// 方向显示 TextView
private TextView deviceDirectionTextView;
// 设定阈值
private static final float THRESHOLD = 5.0f;
// 低通滤波器参数
private static final float ALPHA = 0.25f;
// 稳定性参数
private String lastDirection = "";
private String pendingDirection = "";
private int directionChangeCounter = 0;
private static final int STABLE_THRESHOLD = 3; // 连续3次确认方向
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main); // 请确保布局文件中包含 deviceDirectionTextView
// 初始化传感器
sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
if(sensorManager != null){
accelerometer = sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
magnetometer = sensorManager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD);
}
// 获取方向显示 TextView
deviceDirectionTextView = findViewById(R.id.deviceDirectionTextView);
}
@Override
protected void onResume() {
super.onResume();
// 注册传感器监听
if(accelerometer != null){
sensorManager.registerListener(this, accelerometer, SensorManager.SENSOR_DELAY_UI);
}
if(magnetometer != null){
sensorManager.registerListener(this, magnetometer, SensorManager.SENSOR_DELAY_UI);
}
}
@Override
protected void onPause() {
super.onPause();
// 取消注册传感器监听
sensorManager.unregisterListener(this);
}
@Override
public void onSensorChanged(SensorEvent event) {
if(event.sensor.getType() == Sensor.TYPE_ACCELEROMETER){
gravity = lowPassFilter(event.values.clone(), gravity);
}
if(event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD){
geomagnetic = lowPassFilter(event.values.clone(), geomagnetic);
}
if(gravity != null && geomagnetic != null){
float rotationMatrix[] = new float[9];
float inclinationMatrix[] = new float[9];
boolean success = SensorManager.getRotationMatrix(rotationMatrix, inclinationMatrix, gravity, geomagnetic);
if(success){
float orientation[] = new float[3];
SensorManager.getOrientation(rotationMatrix, orientation);
float azimuth = orientation[0]; // 方位角
float pitch = orientation[1]; // 俯仰角
float roll = orientation[2]; // 横滚角
// 将弧度转换为度
pitch = (float)Math.toDegrees(pitch);
roll = (float)Math.toDegrees(roll);
// 判断设备是否水平(误差范围内)
String currentDirection;
if(Math.abs(pitch) < THRESHOLD && Math.abs(roll) < THRESHOLD){
currentDirection = "设备水平"; // 使用硬编码字符串,实际项目中建议使用资源字符串
} else {
currentDirection = determinePrimaryDirection(pitch, roll);
}
// 更新方向显示
if(deviceDirectionTextView != null){
deviceDirectionTextView.setText(currentDirection);
}
// 检查方向是否变化
if(!currentDirection.equals(lastDirection)){
if(currentDirection.equals(pendingDirection)){
directionChangeCounter++;
if(directionChangeCounter >= STABLE_THRESHOLD){
// 确认方向变化
handleDirectionChange(currentDirection);
lastDirection = currentDirection;
directionChangeCounter = 0;
pendingDirection = "";
}
} else {
// 新方向,开始计数
pendingDirection = currentDirection;
directionChangeCounter = 1;
}
} else {
// 方向未变化,重置计数器
pendingDirection = "";
directionChangeCounter = 0;
}
}
}
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
// 可根据需要实现
}
// 低通滤波器方法
private float[] lowPassFilter(float[] input, float[] output) {
if (output == null) return input;
for (int i = 0; i < input.length; i++) {
output[i] = output[i] + ALPHA * (input[i] - output[i]);
}
return output;
}
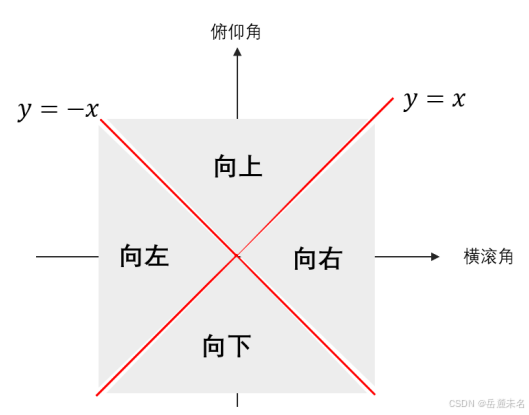
// 确定主要倾斜方向
private String determinePrimaryDirection(float pitch, float roll){
String direction = "";
if(Math.abs(pitch) > Math.abs(roll)){
if(pitch > THRESHOLD){
direction = "前倾";
} else if(pitch < -THRESHOLD){
direction = "后仰";
}
} else {
if(roll > THRESHOLD){
direction = "右倾";
} else if(roll < -THRESHOLD){
direction = "左倾";
}
}
return direction;
}
private void handleDirectionChange(String direction){
// 根据方向变化控制游戏逻辑,例如移动游戏角色
switch(direction){
case "前倾":
// gameView.moveUp();
break;
case "后仰":
// gameView.moveDown();
break;
case "左倾":
// gameView.moveLeft();
break;
case "右倾":
// gameView.moveRight();
break;
case "设备水平":
// 可选择不进行任何操作
break;
default:
break;
}
// gameView.invalidate(); // 刷新游戏视图
}
}
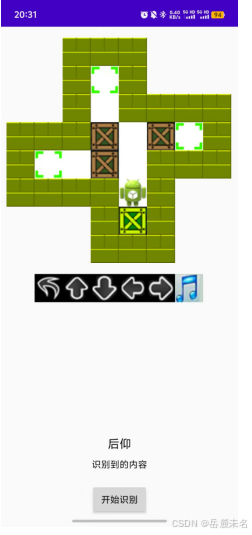
六、运行结果
程序可以鲁棒运行,正确感知用户意图。
七、总结
通过合理地利用 Android 设备的 IMU 数据,并结合低通滤波和稳定性算法,我们能够实现对游戏角色的精准控制,提升用户的游戏体验。本文详细介绍了 IMU 的基本原理、数据处理方法以及核心实现代码,希望能为广大开发者在传感器应用领域提供有价值的参考。
如果你对本文内容有任何疑问或建议,欢迎在评论区留言讨论。希望这篇文章能帮助你在 Android 游戏开发中更好地应用传感器数据,创造出更加出色的作品!
版权声明
本文为原创文章,未经作者允许,禁止转载其他形式的发布。如有疑问,请联系作者获取更多信息。
关注我
如果你觉得这篇文章对你有帮助,欢迎点赞、收藏和分享!也可以关注我的博客,获取更多技术干货。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











