



一、模型训练
1.yolov10官方源码:https://github.com/THU-MIG/yolov10
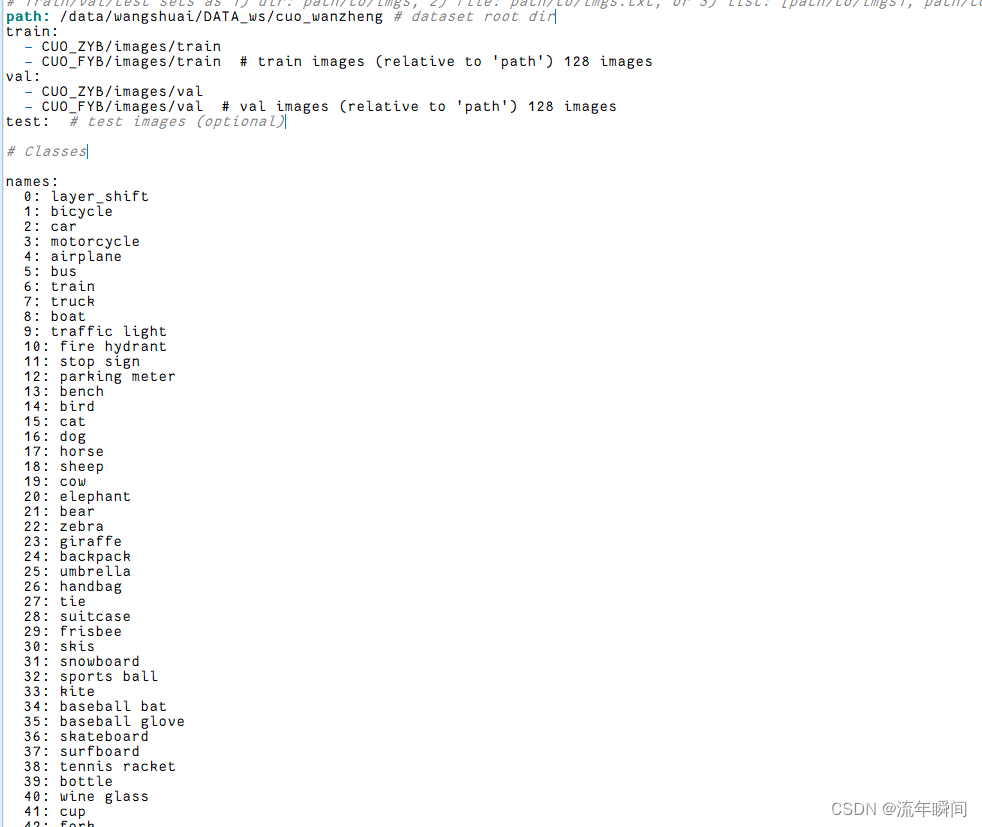
2.训练自己的数据,修改data.yaml,类别数80,修改第一个类别为自己的类别
3.运行训练脚本
yolo detect train model= yolov10n.pt data= ultralytics/cfg/datasets/cuoceng.yaml epochs=200 batch=128 device=2,3
4.训练完成得到pt模型文件
二、模型转ncnn,量化int8
1.创建export.py
from ultralytics import YOLO
model = YOLO("/data/wangshuai/warpyolo/yolov10-1/yolov10/runs/detect/train2/weights/best.pt")
success = model.export(format="ncnn", dynamic=True, simplify=True, opset=13)
2.运行脚本输出得到ncnn模型文件
3.修改模型网络结构
修改head.py中v10Detect类中的forward函数,修改如下:
class v10Detect(Detect):
max_det = 300
def __init__(self, nc=80, ch=()):
super().__init__(nc, ch)
c3 = max(ch[0], min(self.nc, 100)) # channels
self.cv3 = nn.ModuleList(nn.Sequential(nn.Sequential(Conv(x, x, 3, g=x), Conv(x, c3, 1)), \
nn.Sequential(Conv(c3, c3, 3, g=c3), Conv(c3, c3, 1)), \
nn.Conv2d(c3, self.nc, 1)) for i, x in enumerate(ch))
self.one2one_cv2 = copy.deepcopy(self.cv2)
self.one2one_cv3 = copy.deepcopy(self.cv3)
""" def forward(self, x):
one2one = self.forward_feat([xi.detach() for xi in x], self.one2one_cv2, self.one2one_cv3)
if not self.export:
one2many = super().forward(x)
if not self.training:
one2one = self.inference(one2one)
if not self.export:
return {"one2many": one2many, "one2one": one2one}
else:
assert(self.max_det != -1)
boxes, scores, labels = ops.v10postprocess(one2one.permute(0, 2, 1), self.max_det, self.nc)
return torch.cat([boxes, scores.unsqueeze(-1), labels.unsqueeze(-1).to(boxes.dtype)], dim=-1)
else:
return {"one2many": one2many, "one2one": one2one} """
def forward(self, x):
z = [] # inference output
for i in range(len(x)):
print('222',self.cv2[i](x[i]).permute(0, 2, 3, 1).shape)
print('333',self.cv3[i](x[i]).permute(0, 2, 3, 1).shape)
x[i] = torch.cat((((self.one2one_cv3[i](x[i])).permute(0, 2, 3, 1)).sigmoid(),(self.one2one_cv2[i](x[i])).permute(0, 2, 3, 1)), 3)
feat = x[i] # conv
# x(bs,255,20,20) -> x(bs,20,20,255)
feat = feat.contiguous()
print('111',feat.shape)
z.append(feat)
return tuple(z)
def bias_init(self):
super().bias_init()
"""Initialize Detect() biases, WARNING: requires stride availability."""
m = self # self.model[-1] # Detect() module
# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1
# ncf = math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # nominal class frequency
for a, b, s in zip(m.one2one_cv2, m.one2one_cv3, m.stride): # from
a[-1].bias.data[:] = 1.0 # box
b[-1].bias.data[: m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # cls (.01 objects, 80 classes, 640 img)
4.修改完成后重新运行export.py
三、ncnn模型推理
1.在ncnn中编译yolov10.cpp,修改模型文件路径,修改输入输出,修改输出图片保存路径
yolov10.cpp:
#include "layer.h"
#include "net.h"
#include "opencv2/opencv.hpp"
#include <float.h>
#include <stdio.h>
#include <vector>
#include <iostream>
#define MAX_STRIDE 32
struct Object
{
cv::Rect_<float> rect;
int label;
float prob;
};
static float softmax(
const float* src,
float* dst,
int length
)
{
float alpha = -FLT_MAX;
for (int c = 0; c < length; c++)
{
float score = src[c];
if (score > alpha)
{
alpha = score;
}
}
float denominator = 0;
float dis_sum = 0;
for (int i = 0; i < length; ++i)
{
dst[i] = expf(src[i] - alpha);
denominator += dst[i];
}
for (int i = 0; i < length; ++i)
{
dst[i] /= denominator;
dis_sum += i * dst[i];
}
return dis_sum;
}
static float clamp(
float val,
float min = 0.f,
float max = 1280.f
)
{
return val > min ? (val < max ? val : max) : min;
}
static void non_max_suppression(
std::vector<Object>& proposals,
std::vector<Object>& results,
int orin_h,
int orin_w,
float dh = 0,
float dw = 0,
float ratio_h = 1.0f,
float ratio_w = 1.0f,
float conf_thres = 0.25f,
float iou_thres = 0.65f
)
{
results.clear();
for (auto& pro : proposals)
{
float x0 = pro.rect.x;
float y0 = pro.rect.y;
float x1 = pro.rect.x + pro.rect.width;
float y1 = pro.rect.y + pro.rect.height;
float& score = pro.prob;
int& label = pro.label;
x0 = (x0 - dw) / ratio_w;
y0 = (y0 - dh) / ratio_h;
x1 = (x1 - dw) / ratio_w;
y1 = (y1 - dh) / ratio_h;
x0 = clamp(x0, 0.f, orin_w);
y0 = clamp(y0, 0.f, orin_h);
x1 = clamp(x1, 0.f, orin_w);
y1 = clamp(y1, 0.f, orin_h);
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.prob = score;
obj.label = label;
results.push_back(obj);
}
}
static void generate_proposals(
int stride,
const ncnn::Mat& feat_blob,
const float prob_threshold,
std::vector<Object>& objects
)
{
const int reg_max = 16;
float dst[16];
const int num_w = feat_blob.w;
const int num_grid_y = feat_blob.c;
const int num_grid_x = feat_blob.h;
const int num_class = num_w - 4 * reg_max;
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
const float* matat = feat_blob.channel(i).row(j);
int class_index = 0;
float class_score = -FLT_MAX;
for (int c = 0; c < num_class; c++)
{
float score = matat[c];
if (score > class_score)
{
class_index = c;
class_score = score;
}
}
if (class_score >= prob_threshold)
{
float x0 = j + 0.5f - softmax(matat + num_class, dst, 16);
float y0 = i + 0.5f - softmax(matat + num_class + 16, dst, 16);
float x1 = j + 0.5f + softmax(matat + num_class + 2 * 16, dst, 16);
float y1 = i + 0.5f + softmax(matat + num_class + 3 * 16, dst, 16);
x0 *= stride;
y0 *= stride;
x1 *= stride;
y1 *= stride;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = class_score;
objects.push_back(obj);
}
}
}
}
static int detect_yolov10(const cv::Mat& bgr, std::vector<Object>& objects)
{
ncnn::Net yolov10;
yolov10.opt.use_vulkan_compute = true;
// yolov10.opt.use_bf16_storage = true;
// original pretrained model from https://github.com/ultralytics/ultralytics
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
if (yolov10.load_param("/home/wangshuai/WS/new_kl/kl_ncnn_yolov5/model/model.ncnn-cuo1.param"))
exit(-1);
if (yolov10.load_model("/home/wangshuai/WS/new_kl/kl_ncnn_yolov5/model/model.ncnn-cuo1.bin"))
exit(-1);
const int target_size = 640;
const float prob_threshold = 0.25f;
const float nms_threshold = 0.45f;
int img_w = bgr.cols;
int img_h = bgr.rows;
// letterbox pad to multiple of MAX_STRIDE
int w = img_w;
int h = img_h;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, img_w, img_h, w, h);
// pad to target_size rectangle
// ultralytics/yolo/data/dataloaders/v5augmentations.py letterbox
// int wpad = (w + MAX_STRIDE - 1) / MAX_STRIDE * MAX_STRIDE - w;
// int hpad = (h + MAX_STRIDE - 1) / MAX_STRIDE * MAX_STRIDE - h;
int wpad = target_size - w;
int hpad = target_size - h;
int top = hpad / 2;
int bottom = hpad - hpad / 2;
int left = wpad / 2;
int right = wpad - wpad / 2;
ncnn::Mat in_pad;
ncnn::copy_make_border(in,
in_pad,
top,
bottom,
left,
right,
ncnn::BORDER_CONSTANT,
114.f);
const float norm_vals[3] = { 1 / 255.f, 1 / 255.f, 1 / 255.f };
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = yolov10.create_extractor();
ex.input("in0", in_pad);
std::vector<Object> proposals;
// stride 8
{
ncnn::Mat out;
ex.extract("out0", out);
std::vector<Object> objects8;
generate_proposals(8, out, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
}
// stride 16
{
ncnn::Mat out;
ex.extract("out1", out);
std::vector<Object> objects16;
generate_proposals(16, out, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
}
// stride 32
{
ncnn::Mat out;
ex.extract("out2", out);
std::vector<Object> objects32;
generate_proposals(32, out, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
}
// objects = proposals;
for (auto& pro : proposals)
{
float x0 = pro.rect.x;
float y0 = pro.rect.y;
float x1 = pro.rect.x + pro.rect.width;
float y1 = pro.rect.y + pro.rect.height;
float& score = pro.prob;
int& label = pro.label;
x0 = (x0 - (wpad / 2)) / scale;
y0 = (y0 - (hpad / 2)) / scale;
x1 = (x1 - (wpad / 2)) / scale;
y1 = (y1 - (hpad / 2)) / scale;
x0 = clamp(x0, 0.f, img_w);
y0 = clamp(y0, 0.f, img_h);
x1 = clamp(x1, 0.f, img_w);
y1 = clamp(y1, 0.f, img_h);
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.prob = score;
obj.label = label;
objects.push_back(obj);
}
// non_max_suppression(proposals, objects,
// img_h, img_w, hpad / 2, wpad / 2,
// scale, scale, prob_threshold, nms_threshold);
return 0;
}
static void draw_objects(const cv::Mat& bgr, const std::vector<Object>& objects)
{
static const char* class_names[] = {
"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
"fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
"elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
"sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
"potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone",
"microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
"hair drier", "toothbrush"
};
cv::Mat image = bgr.clone();
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2f\n", obj.label, obj.prob,
obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(image, obj.rect, cv::Scalar(255, 0, 0));
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
cv::imwrite("/home/wangshuai/WS/new_kl/kl_ncnn_yolov5/img_dir/output.jpg", image);
cv::imshow("image", image);
cv::waitKey(0);
}
int main(int argc, char** argv)
{
if (argc != 2)
{
fprintf(stderr, "Usage: %s [imagepath]\n", argv[0]);
return -1;
}
const char* imagepath = argv[1];
cv::Mat m = cv::imread(imagepath, 1);
// cv::resize(m, m, cv::Size(640,640));
if (m.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector<Object> objects;
detect_yolov10(m, objects);
draw_objects(m, objects);
return 0;
}
2.编译环境
ncnn编译环境与yolov8-ncnn一致
3.推理验证
./examples/yolov10 ../img_dir/test/cuoceng.jpg
框好像有点重复了,不知道什么原因,欢迎指正

目前问题已解决,forward函数重新修改后,结果正常

四、总结
1.yolov10与yolov8整体差异不大,yolov10的模型架构由以下几个部分组成:
-
主干网络:使用增强版的CSPNet来提取图像特征,它能改善梯度流并减少计算量。
-
颈部:采用PAN结构汇聚不同尺度的特征,有效地实现多尺度特征融合。
-
一对多预测头:在训练过程中为每个对象生成多个预测,用来提供丰富的监督信号从而提高学习的准确性;在推理阶段不生效,从而减少计算量。
-
一对一预测头:在推理过程中为每个对象生成一个最佳预测,无需NMS操作,从而减少延迟并提高推理效率。
2.yolov10的主要特点如下:
-
利用一致的双重分配来消除对NMS的需求,从而减少推理延迟。
-
从推理效率和准确性的角度出发全面优化各种组件,包括轻量级分类头、空间通道去耦下采样和等级引导块设计。
-
引入大核卷积和部分自注意模块,在不增加大量计算成本的情况下提高性能。
3.yolov10-ncnn总体流程
-
训练模型得到pt模型文件
-
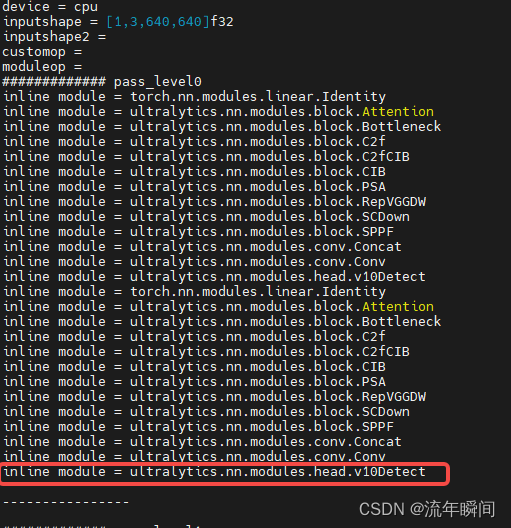
使用ncnn的pnnx转换工具得到bin, param 注意,由于模型文件中集成了nms模块,包含ncnn暂不支持的算子,会导致一些算子没有被转换
-
手动改写bin, param文件(param文件去掉nms的部分; 该过程请注意参照可视化工具以确定删除的范围)
-
自己写一个nms后处理 具体的细节建议多参照可视化工具确定操作矩阵的具体信息;核心步骤是去除自带的nms。


















 794
794




 到【灌水乐园】发言
到【灌水乐园】发言







