




 AFDet是基于PointPillar的无锚点三维目标检测网络,其结构与CenterPoint相似。它使用高斯核半径增大的方法处理小物体的heatmap目标,并且在offset预测上采用连续值和误差纠正。AFDet的heatmap目标生成与CenterPoint不同,采用物体内部点与中心距离的反比。在Pillar设置上,AFDet为[0.16m, 0.16m],而CenterPoint在Waymo上为[0.32m, 0.32m]。"
115396135,4993831,理解与使用Source Map,"['javascript', 'webpack', '调试', '开发工具']
AFDet是基于PointPillar的无锚点三维目标检测网络,其结构与CenterPoint相似。它使用高斯核半径增大的方法处理小物体的heatmap目标,并且在offset预测上采用连续值和误差纠正。AFDet的heatmap目标生成与CenterPoint不同,采用物体内部点与中心距离的反比。在Pillar设置上,AFDet为[0.16m, 0.16m],而CenterPoint在Waymo上为[0.32m, 0.32m]。"
115396135,4993831,理解与使用Source Map,"['javascript', 'webpack', '调试', '开发工具']
这里写自定义目录标题
本文也是使用anchor free的方式来做object detection的,网络结构看下来和CenterPoint很像。
AFDet
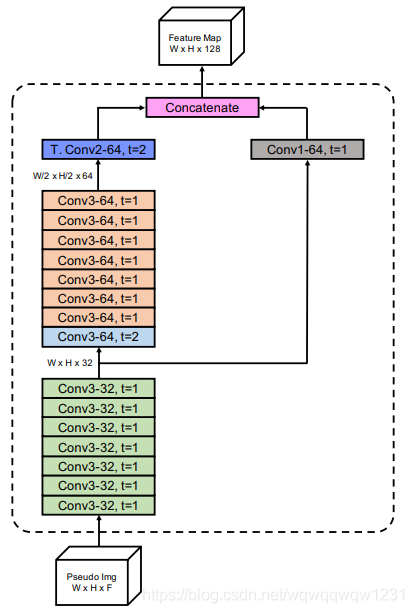
Backbone & Neck
使用PointPillar的方式构建backbone,但是只进行了一次stride=2的conv,然后又upsample,所以backbone输出的特征图的分辨率和输入的分辨率是一样的。
对于KITTI数据集,pillar的尺寸时[0.16m, 0.16m]
Head
从网络结构上看,就是标准的anchor free的head,和CenterNet,CenterPoint差不多。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2354
2354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









