



加减速算法是运动控制中的关键技术之一,也是实现高速、高效率的关键因素之一。在工业控制中,一方面要求加工的过程平滑、稳定,柔性冲击小;另一方面需要响应时间快,反应迅速。在保证控制精度的前提下来提高加工效率,实现机械运动平滑稳定,是目前工业加工中一直要解决的关键问题。当前运动控制系统中常用的加减速算法主要有:梯形曲线加减速、S形曲线加减速、指数曲线加减速、抛物线曲线加减速等。
1、“梯形”加减速
定义:指按直线方式(从启动速度到目标速度的加减速),以一定的比例进行加速/减速
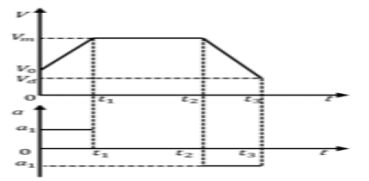
图1: “梯形”加减速速度及加速度曲线
计算公式:
![]()
优缺点: 梯形曲线其特点是算法简便,占用时少、响应快、效率高,实现方便。但匀加速和匀减速阶段不符合步进电机速度变化规律,在变速和匀速转折点不能平滑过渡。所以这种算法主要应用在对升降速过程要求不高的场合。
“指数形”加减速
定义:指按指数函数方式进行加减速。
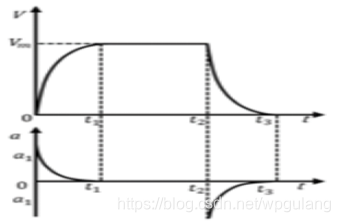
图2: “指数型”加减速速度及加速度曲线
计算公式:

优缺点:指数曲线克服了梯形加减速的速度不平稳问题,运动精度得到了提高,但初始加速度大,容易引起机械部件的冲击,在加减速的起点仍然存在加减速突变,限制了加速度的提高。
“S形”加减速
定义:加速/减速开始时速度比较缓慢,然后逐渐加快。在加速/减速接近结束时速度再次减慢下来,从而使移动较为稳定。S 字加减速的类型有Sin 曲线、2次曲线、循环曲线、3 次曲线
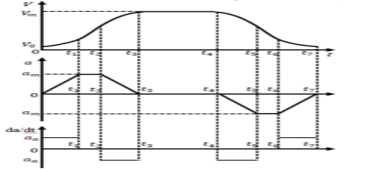
图3: “S型”加减速速度及加速度曲线
计算公式:
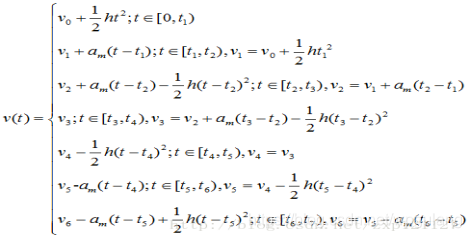
优缺点:S曲线加减速是一种柔性程序较好的控制策略,能让电机性能得到充分的发挥,冲击振动小,但是实现过程比较复杂,计算量相对较大,并且加减速效率不高。
加减速控制评价指标
1、机械运动轨迹及位置误差应该尽量的小
2、机械运动过程平稳、抖动小,且响应迅速
3、加减速算法应该尽量简单,便于实现,能够满足控制的实时性要求
梯形加减速速度曲线
采用“梯形”加减速算法,在运动过程中分成以下四个状态:空闲状态,加速状态,匀速状态与减速状态。
加减速算法实现

图2 加减速实现算法
脉冲产生单元:用来产生指定频率的脉冲信号。
脉冲计数单元:用来记录各个运动状态下输出的脉冲个数。
脉宽计算单元:根据总的脉冲个数及记录的各个运动状态下的脉冲输出个数,进行状态跳转及速度计算。
脉冲产生单元
初始化STM32定时器,在定时器中断里面,翻转IO口,输出脉冲信号。
//初始化定时器功能,用来翻转IO信号,产生脉冲输出信号
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
//定时器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
//中断优先级NVIC设置
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级1级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //从优先级0级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器
TIM_Cmd(TIM3, DISABLE); //不使能TIMx
}//设置定时器值,用来产生指定频率的脉冲信号
void Motor0TimeSet(unsigned int ARR,bool TimeEnable)
{
TIM3->ARR = (uint16_t)ARR;
if(TimeEnable) TIM_Cmd(TIM3, ENABLE);
else TIM_Cmd(TIM3, DISABLE);
}//翻转IO
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update );
MotorPulsePinOut(&MotorControl[0]);
}
}脉冲计数单元
用来记录各个阶段输出的脉冲信号;根据设置的值和输出脉冲进行加减速状态切换。

图 3 加减速状态切换
void MotorRunState(MOTOR_CTRL *Motor)
{
switch(Motor->NowState.RunState)
{
case MIDLE://开始
Motor->NowState.AllowMaxAddStep = Motor->SetData.RunStep/2;
Motor->NowState.RunState = MACC;
break;
case MACC://加速状态
Motor->NowState.AddStep ++;
Motor->NowState.RunStep ++;
if(Motor->NowState.AddStep >= Motor->NowState.AllowMaxAddStep)//三角形加速
Motor->NowState.RunState = MDEC;
else if(Motor->NowState.Speed >= Motor->SetData.SpeedMax)
Motor->NowState.RunState = MKEEP;
break;
case MKEEP://最大速度阶段
Motor->NowState.RunStep ++;
if(Motor->NowState.AddStep >= Motor->SetData.RunStep - Motor->NowState.RunStep)
Motor->NowState.RunState = MDEC;
break;
case MDEC://减速阶段
Motor->NowState.RunStep ++;
if(Motor->NowState.RunStep >= Motor->SetData.RunStep)//脉冲输出完成
{
Motor->TimeSet_Call_Back(Motor->NowState.TimeCountNum,false);//关闭定时器,停止脉冲信号输出
Motor->NowState.SysState = MOV_IDLE;
Motor->NowState.Consequence = 0; //执行结果
}
}
if(Motor->NowState.SysState)Motor->TimeSet_Call_Back(Motor->NowState.TimeCountNum,true);//设置下一次脉冲输出频率
}速度计算单元
根据当前处于电机加减速的那个状态,进行速度计算。采用定时1MS计算一次速度的方式。

图 4 速度计算模块
void MotorCalculateSpeed(MOTOR_CTRL *Motor)
{
switch(Motor->NowState.RunState)
{
case MIDLE:
Motor->NowState.Speed = Motor->SetData.Speed0;
break;
case MACC:
Motor->NowState.Speed += Motor->SetData.SpeedAdd;
if(Motor->NowState.Speed > Motor->SetData.SpeedMax)
Motor->NowState.Speed = Motor->SetData.SpeedMax;
break;
case MKEEP:
Motor->NowState.Speed = Motor->SetData.SpeedMax;
break;
case MDEC:
Motor->NowState.Speed -= Motor->SetData.SpeedAdd;
if(Motor->NowState.Speed < Motor->SetData.Speed0)
Motor->NowState.Speed = Motor->SetData.Speed0;
break;
}
if(Motor->NowState.Busy)
{
Motor->NowState.TimeCountNum = 1000*1000/Motor->NowState.Speed;//计算定时器应该重装的值
Motor->NowState.MotorRunTime++;//统计电机运行时间
}
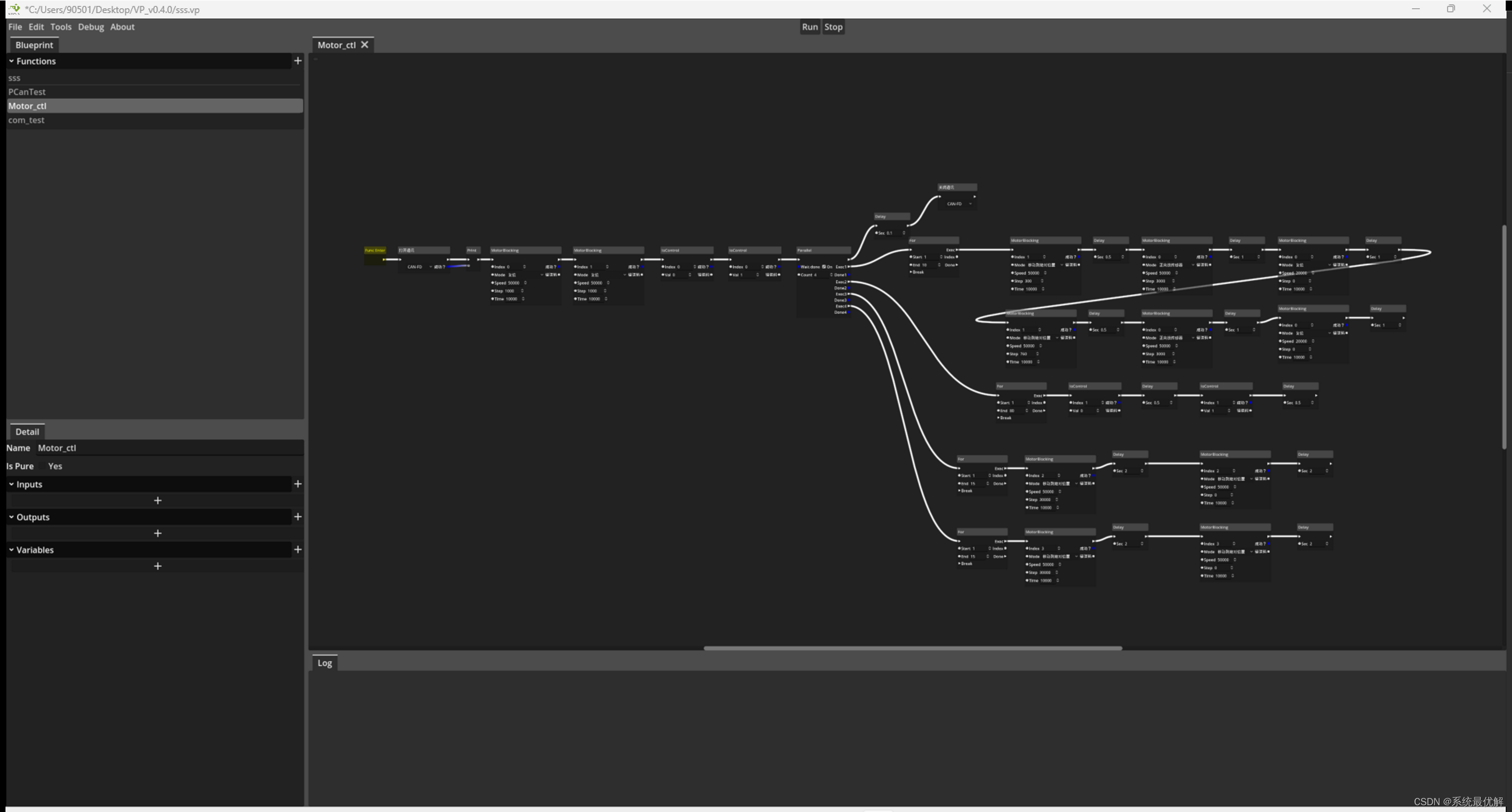
} 最近基于STM32做了一块运动控制板,并且配套的做了一个可视化编程软件。可以轻松的使用可视化编程软件来控制。并且开源了通信协议,可以自己配置通信字典,并根据对应的字典生成下位机的代码。
开源地址:VisualProgramming: 可视化编程软件

















 3362
3362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









