




 本文深入介绍了卡尔曼滤波算法,它用于融合不同数据源以预测系统状态。卡尔曼滤波器结合状态方程和输出方程,通过状态观测器减少误差。算法包括预测和更新两个步骤,适用于线性高斯系统。文章通过汽车定位的例子解释了卡尔曼滤波的工作原理,并指出其在传感器融合和数据优化中的作用。
本文深入介绍了卡尔曼滤波算法,它用于融合不同数据源以预测系统状态。卡尔曼滤波器结合状态方程和输出方程,通过状态观测器减少误差。算法包括预测和更新两个步骤,适用于线性高斯系统。文章通过汽车定位的例子解释了卡尔曼滤波的工作原理,并指出其在传感器融合和数据优化中的作用。
零 前言
在有些场景中,我们希望通过来自不同方面的数据来预测系统的下一个状态。卡尔曼滤波是解决此类问题的一个算法,但是其只能应用于线性的高斯系统。
\space
\space
一 引言
通过一个简单的例子先来说明。假如我们想预测一辆车下一时刻的位置,我们有两大数据来源:一是IMU(Internal Measurement Unit,可以测量加速度、角速度等),二是GPS,三是速度表。结合这三个测量值,我们可以估算出汽车的位置。卡尔曼滤波就可以应用于这个场景。
卡尔曼滤波总体的两大用处:
- 可以优化估算一些无法直接测量但可以间接测量的量
- 可以结合多个传感器的信息来估测系统现在的状态
\space
\space
二 从状态观测器的角度理解卡尔曼滤波
先写一下控制理论里面的几个简单概念:
- 状态变量: 确定系统状态的一组独立(最小)变量。是能完整、确定地描述系统的时域行为的最少的一组变量。
- 状态方程: 描述系统的状态变量之间,及其和系统输入量之间关系的一阶微分方程组。
- 输出方程: 描述系统输出变量与状态变量(有时还包括输入变量)之间的函数关系的代数方程。
- 状态观测器: 为了实现状态反馈控制,就要设法利用巳知的信息(输入量及输出量),通过一个模型来对状态变量进行估计。
系统的状态空间表达式由状态方程和输出方程组成,一般可以表示为:
x
˙
=
A
x
+
B
u
y
=
C
x
\dot{x}=Ax+Bu \\ y=Cx
x˙=Ax+Buy=Cx
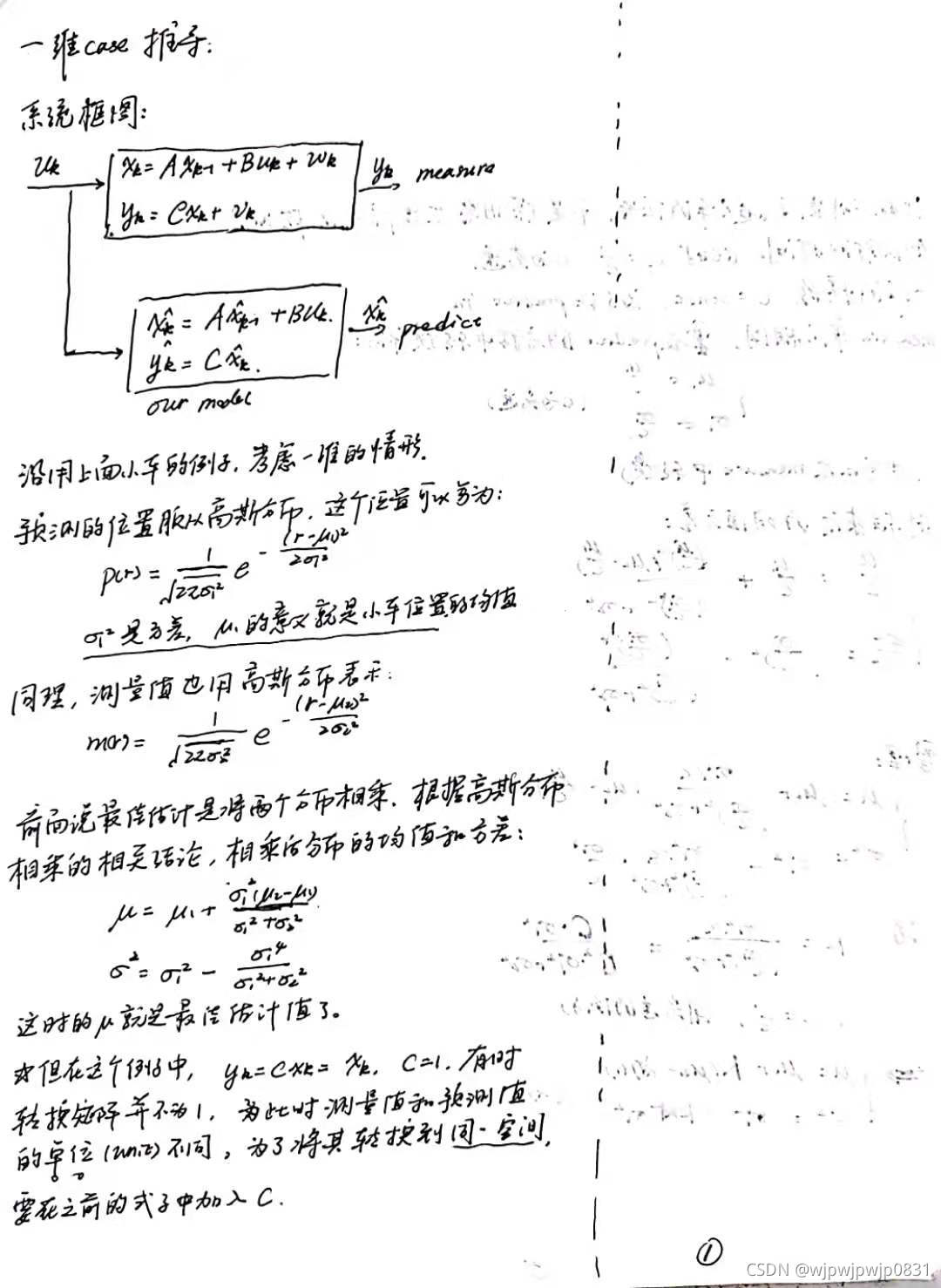
我们设计一个状态观测器 (在问题中,就是我们建立的模型) 来估计系统状态,状态观测器的系统状态变量和输出都用字母加hat表示,其状态空间表达式为:
x
^
˙
=
A
x
^
+
B
u
y
^
=
C
x
^
\dot{\hat{x}}=A\hat{x}+Bu \\ \hat{y}=C\hat{x}
x^˙=Ax^+Buy^=Cx^
系统框图如下:
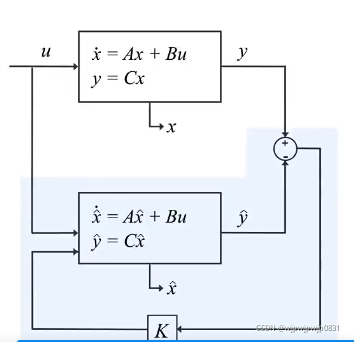
蓝色部分就是state observer,K是负反馈系统,用于将误差
x
−
x
^
x-\hat{x}
x−x^最小化。
误差的表达式为:
e
o
b
s
=
x
−
x
^
e_{obs}=x-\hat{x}
eobs=x−x^
由:
x
˙
=
A
x
+
B
u
x
^
˙
=
A
x
^
+
B
u
+
K
(
y
−
y
^
)
\dot{x}=Ax+Bu \\ \dot{\hat{x}}=A\hat{x}+Bu + K(y-\hat{y})
x˙=Ax+Bux^˙=Ax^+Bu+K(y−y^)
得到:
e
o
b
s
˙
=
x
˙
−
x
^
˙
=
A
(
x
−
x
^
)
−
K
(
C
(
x
−
x
^
)
)
=
A
e
o
b
s
−
K
C
e
o
b
s
=
(
A
−
K
C
)
e
o
b
s
\dot{e_{obs}}=\dot{x}-\dot{\hat{x}}=A(x-\hat{x})-K(C(x-\hat{x}))=Ae_{obs}-KCe_{obs}=(A-KC)e_{obs}
eobs˙=x˙−x^˙=A(x−x^)−K(C(x−x^))=Aeobs−KCeobs=(A−KC)eobs
解这个微分方程,得到:
e
o
b
s
(
t
)
=
e
(
A
−
K
C
)
t
e
o
b
s
(
0
)
e_{obs}(t)=e^{(A-KC)t}e_{obs}(0)
eobs(t)=e(A−KC)teobs(0)
所以,如果
A
−
K
C
<
0
A-KC<0
A−KC<0,则误差会收敛,否则不会。 因此
K
K
K的选择对于收敛速度就尤为重要,选择
K
K
K的方法,就是使用Kalman滤波器。
\space
\space
三 卡尔曼滤波的工作原理
先以一个最简单的一维例子说明。假设我们要造一个自动驾驶汽车,而且想要时刻预测它的位置。那么状态向量就只有位置信息一个,即
k
k
k时刻的状态为:
x
k
=
[
p
o
s
i
t
i
o
n
]
x_k=[position]
xk=[position]
我们要获取的信息就是小车的位置,因此
y
k
=
C
x
k
=
x
k
y_k=Cx_k=x_k
yk=Cxk=xk
假设系统的输入是速度,考虑噪声(干扰),其框图可表示如下:
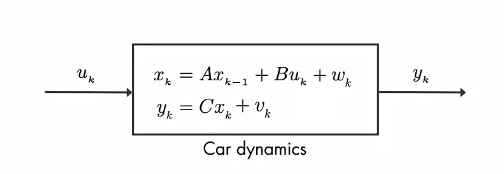
其中
A
A
A为状态转换矩阵,将上一状态投射到这一状态;
B
B
B为控制输入矩阵,将输入投射到当前状态;
v
k
∼
N
(
0
,
R
)
,
w
k
∼
N
(
0
,
Q
)
v_k\sim N(0,R), w_k\sim N(0,Q)
vk∼N(0,R),wk∼N(0,Q).(卡尔曼滤波适用于线性、高斯)
这时候,跟之前说的模型一样,我们有一个自己计算小车位置的模型。此时卡尔曼滤波的作用就是将我们模型的预测值和测量值结合起来,得到最佳的新的状态的估计。 如下图所示:
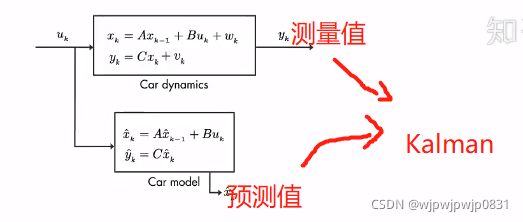
- 好像跟前面第二部分 K K K的作用有些出入,不过Kalman的确是“作用”在真实测量和模型预测之间,来减少误差的部分。所以Kalman滤波的确像一个状态观测器,只不过它是针对随机系统的。
具体怎么做呢?假设
k
−
1
k-1
k−1时刻小车的状态为
x
k
−
1
x_{k-1}
xk−1,其是一个高斯分布。第
k
k
k时刻状态为
x
k
x_k
xk,且方差会增加(为什么?),测量值也是高斯分布,我们将这两个高斯分布相乘,就能得到最佳估计值,如下图所示:
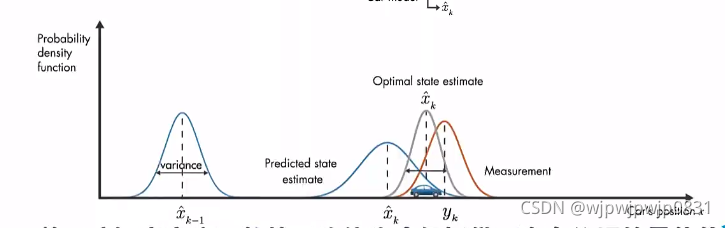
这就是一维case的基本思想。
我手推了一下(懒得打公式了),思路参考的是卡尔曼滤波:从入门到精通,知乎专栏
\space
\space
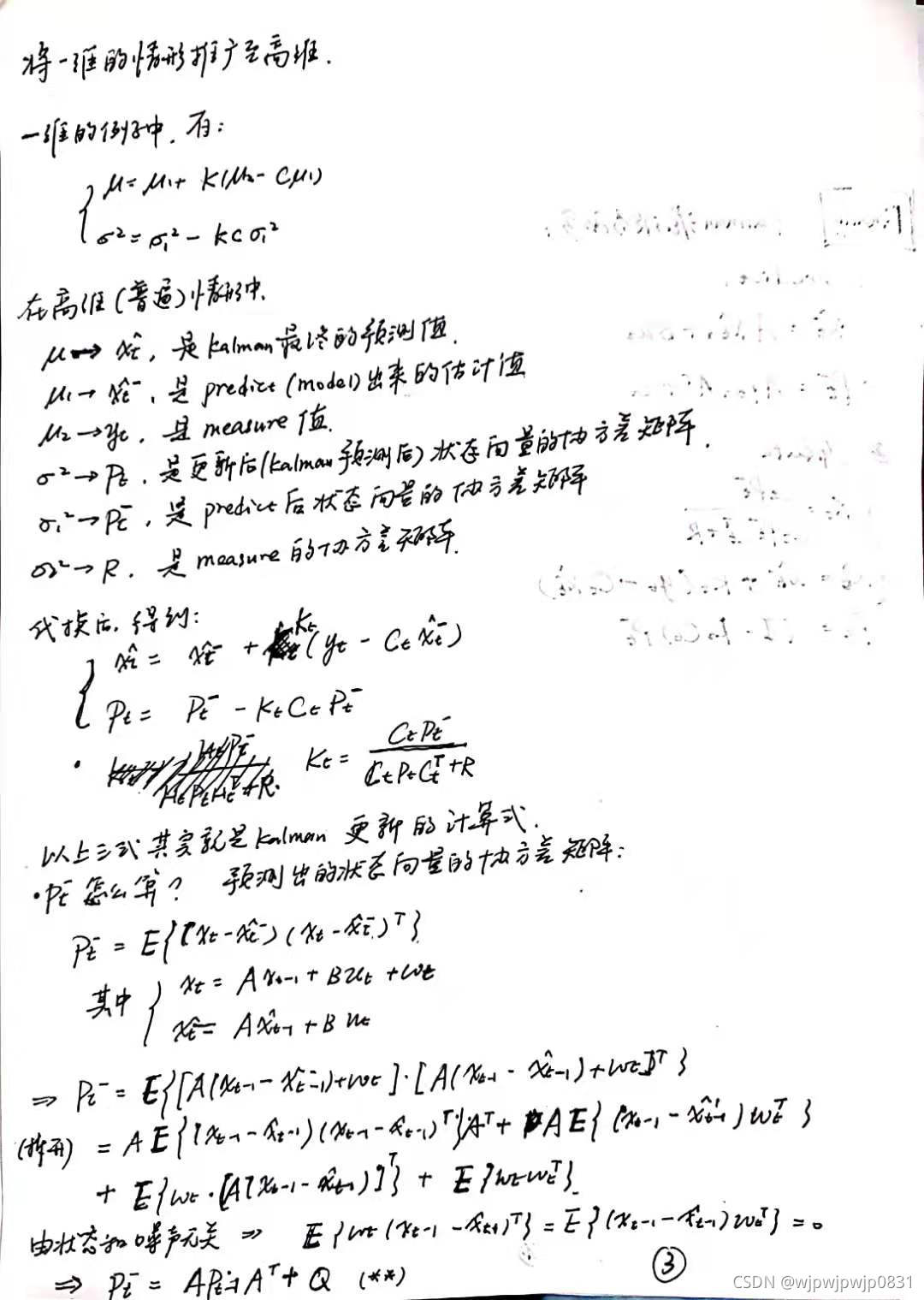
四 将一维情形推广至高维情形
因此,卡尔曼滤波就是一个将预测和测量结合,进行数据融合的算法,如此进行迭代下去,就可以预测每一时刻的状态。
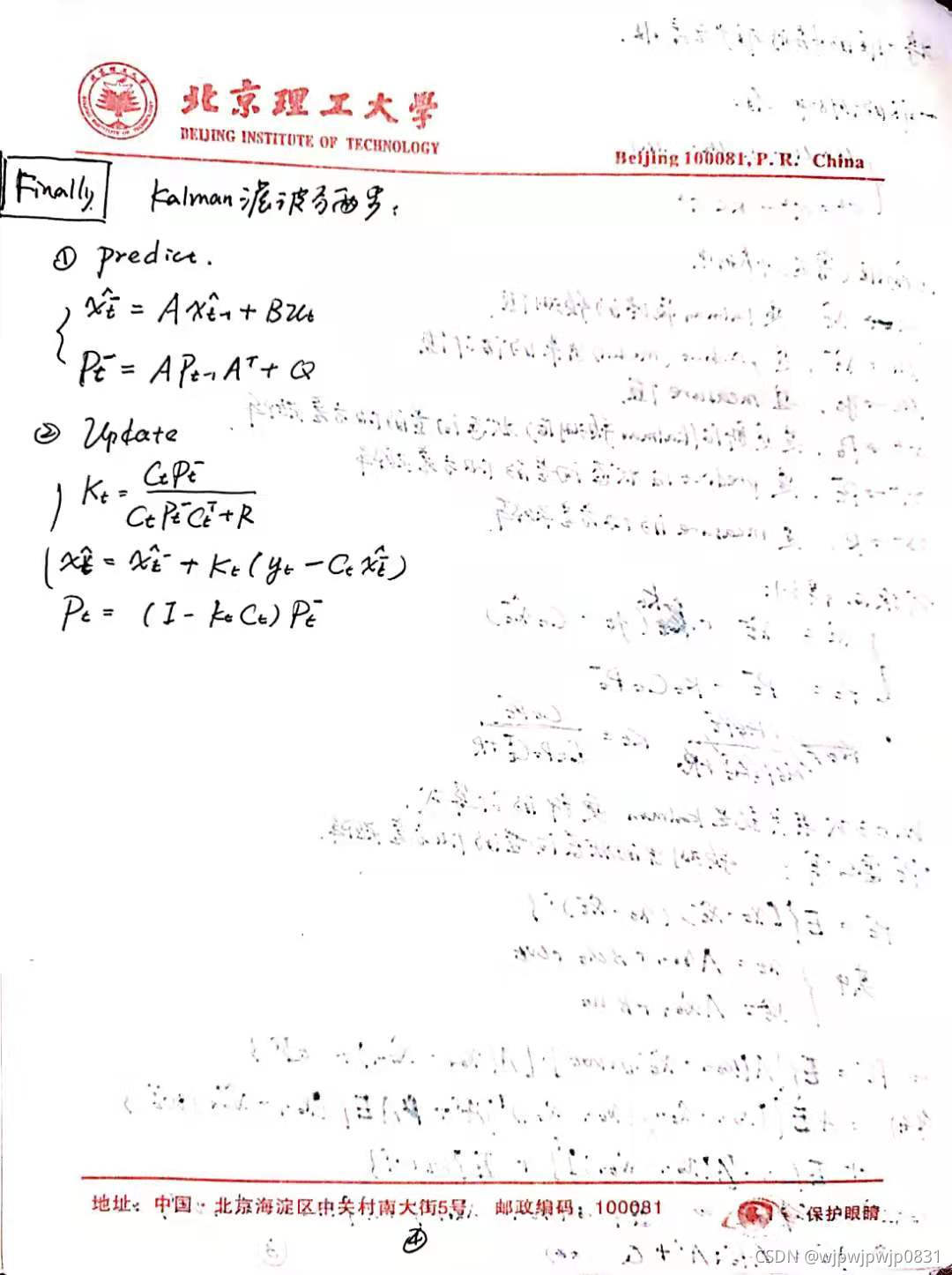
再总结一下,Kalman滤波分两步,
1.predict:
x
t
^
−
=
A
x
t
−
1
^
+
B
u
t
P
t
−
=
A
P
t
−
1
A
T
+
Q
\hat{x_t}^-=A\hat{x_{t-1}}+Bu_t \\ P_t^-=AP_{t-1}A^T+Q
xt^−=Axt−1^+ButPt−=APt−1AT+Q
2.update:
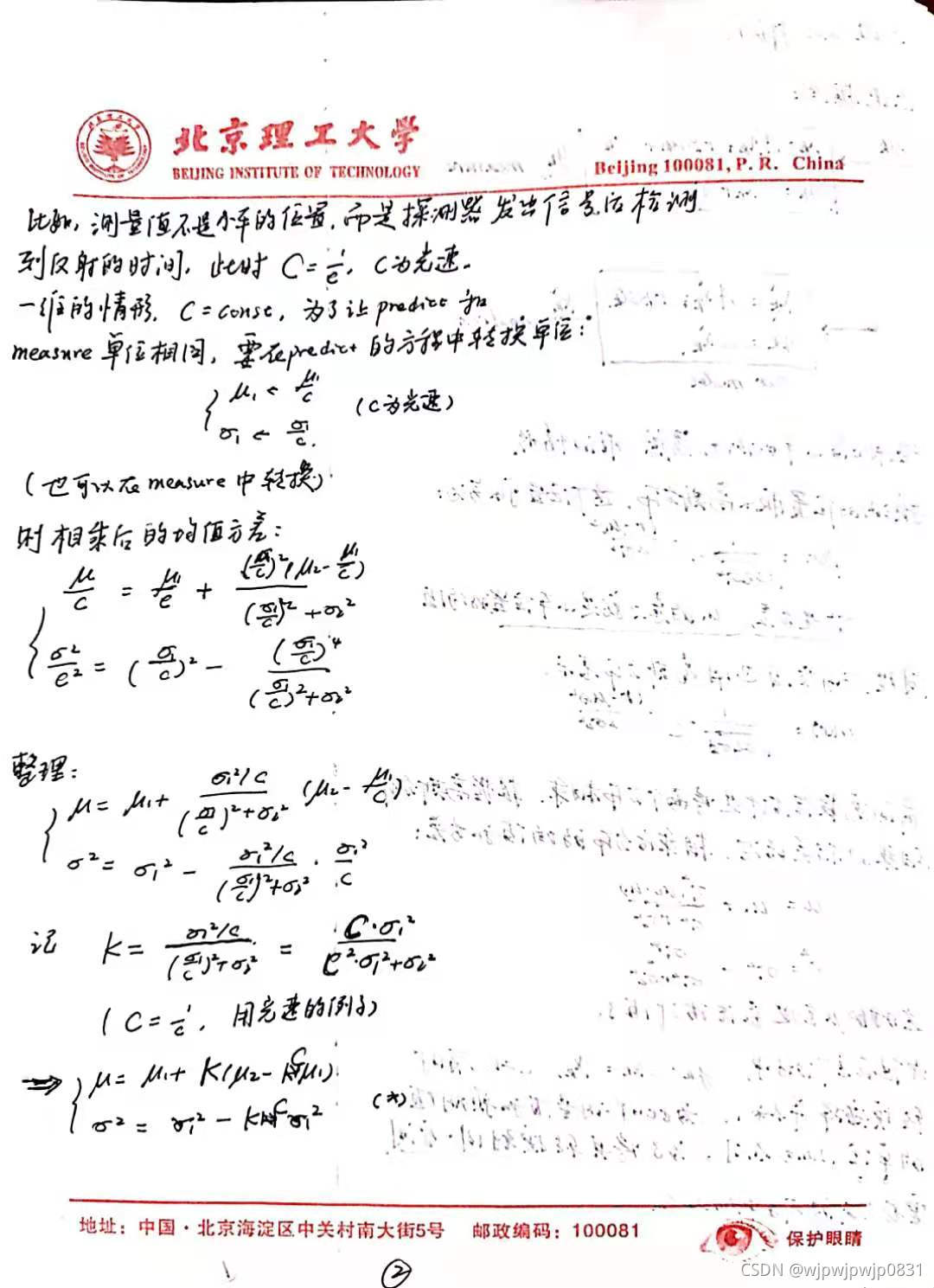
K
t
=
C
t
P
t
−
C
t
P
t
−
C
t
T
+
R
,
称
作
卡
尔
曼
增
益
x
t
^
=
x
t
^
−
+
K
t
(
y
t
−
C
t
x
t
^
−
)
P
t
=
(
I
−
K
t
C
t
)
P
t
−
K_t=\frac{C_tP_t^-}{C_tP_t^-C_t^T+R} ,称作卡尔曼增益\\ \hat{x_t}=\hat{x_t}^-+K_t(y_t-C_t\hat{x_t}^-) \\ P_t=(I-K_tC_t)P_t^-
Kt=CtPt−CtT+RCtPt−,称作卡尔曼增益xt^=xt^−+Kt(yt−Ctxt^−)Pt=(I−KtCt)Pt−
可以看到,状态更新方程 x t ^ = x t ^ − + K t ( y t − C t x t ^ − ) \hat{x_t}=\hat{x_t}^-+K_t(y_t-C_t\hat{x_t}^-) xt^=xt^−+Kt(yt−Ctxt^−)很像状态观测器方程,再次说明了卡尔曼滤波就是一种特殊的state observer。
\space
注
卡尔曼滤波只适用于线性高斯分布情形,对于其他情形有扩展卡尔曼滤波、粒子滤波等。以后再学,把他们的特点和使用条件先记一下。



















 913
913




 到【灌水乐园】发言
到【灌水乐园】发言







