




文章目录
一、Convolutional Social Pooling for Vehicle Trajectory Prediction
Convolutional Social Pooling for Vehicle Trajectory Prediction
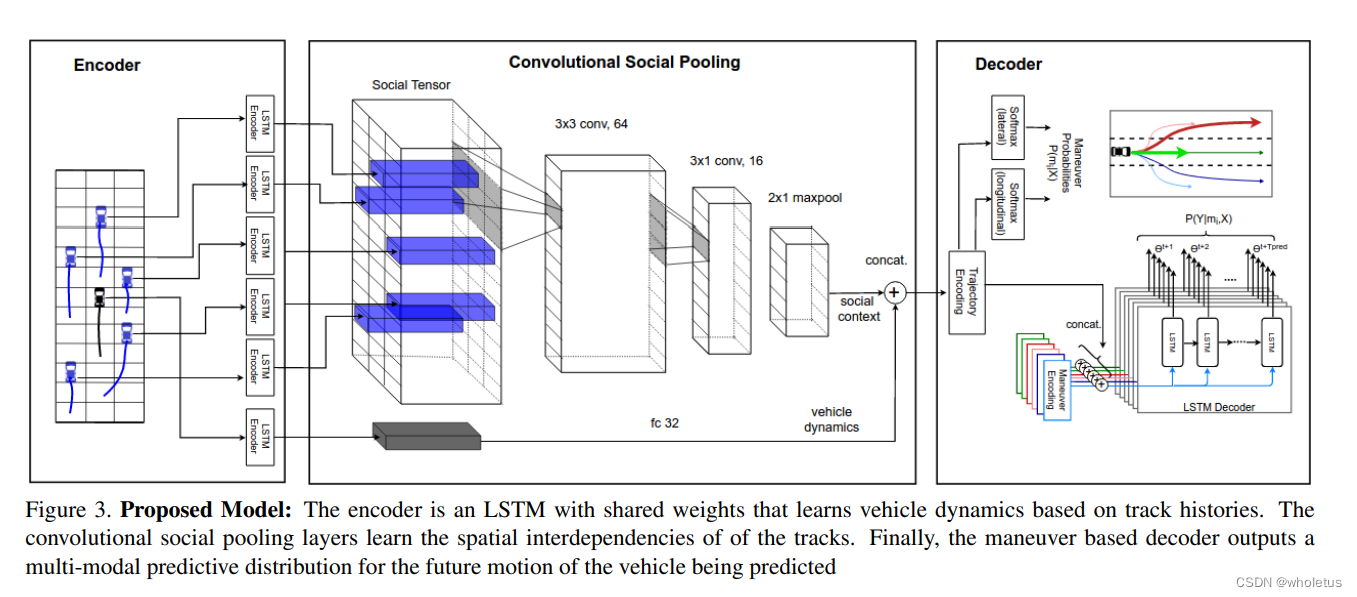
提出一个lstm的encoder和decoder,用cnn social pooling替换social pooling来更健壮的学习车辆运动过程中的相互依赖性,加cnn的好处是:cnn能感知局部车辆相对位置来弥补lstm不能感知相对位置的缺点。另外,模型基于机动类输出一个多模态的预测分布在未来轨迹上。
Convolutional social pooling:我们对于lstm隐藏状态的社会张量(social-tensor)(该状态编码相邻车辆的过去运动),应用cnn和最大池化层来代替一个全连接层
基于机动的解码器:我们的lstm解码器给生成6个机动类的概率分布在未来运动上,并且给每个类分配一个概率,这就是未来运动的多模态性质
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1731
1731




 到【灌水乐园】发言
到【灌水乐园】发言







