



一、背景介绍
对通过结构光相机拍摄圆孔获取的点云进行处理,计算圆孔的圆心半径数据以及近似法向量
二、核心算法原理
-
点云平面拟合分割出圆孔底面
-
边界提取:识别平面内的孔边界点
-
3D 圆拟合:通过 RANSAC 算法拟合孔的三维圆参数
三、效果展示
原始点云
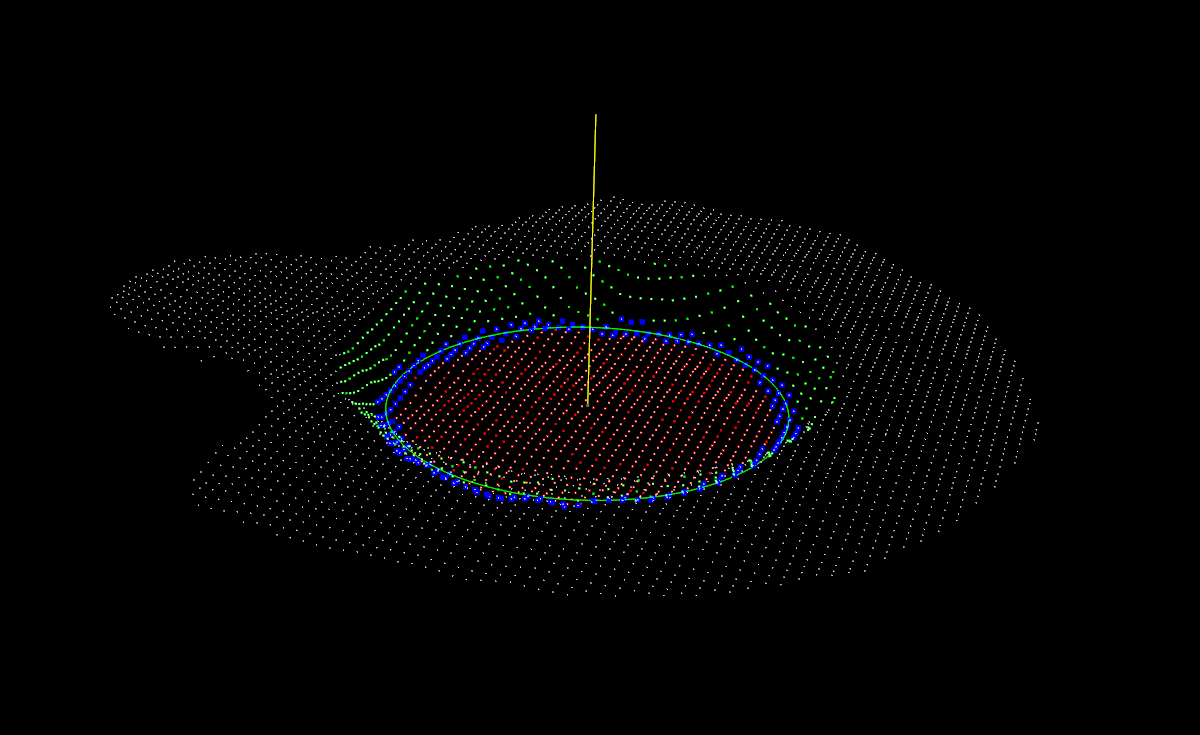
结果可视化
四、完整代码
#include <iostream>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/common/common_headers.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/features/boundary.h>
#include <pcl/sample_consensus/sac_model_circle3d.h>
#include <pcl/sample_consensus/ransac.h>
pcl::PointCloud<pcl::PointXYZ>::Ptr extractBoundary(
const pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud, int normalK = 20,
int boundaryK = 91500, float angleThreshold = M_PI / 4) {
// 1. 计算法线 (使用KNN)
pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> ne;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(
new pcl::search::KdTree<pcl::PointXYZ>);
ne.setInputCloud(cloud);
ne.setSearchMethod(tree);
ne.setKSearch(normalK); // 使用KNN而非半径搜索
ne.compute(*normals);
// 2. 边界提取 (使用KNN)
pcl::BoundaryEstimation<pcl::PointXYZ, pcl::Normal, pcl::Boundary> est;
pcl::PointCloud<pcl::Boundary> boundaries;
est.setInputCloud(cloud);
est.setInputNormals(normals);
est.setSearchMethod(tree);
est.setKSearch(boundaryK); // 一般K值越高,边界识别精度越好
est.setAngleThreshold(angleThreshold);
est.compute(boundaries);
// 3. 提取边界点索引
pcl::PointIndices::Ptr boundaryIndices(new pcl::PointIndices);
for (size_t i = 0; i < boundaries.size(); i++) {
if (boundaries[i].boundary_point) {
boundaryIndices->indices.push_back(i);
}
}
// 4. 分离边界点云
pcl::ExtractIndices<pcl::PointXYZ> extract;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_boundary(
new pcl::PointCloud<pcl::PointXYZ>);
extract.setInputCloud(cloud);
extract.setIndices(boundaryIndices);
extract.filter(*cloud_boundary);
return cloud_boundary;
}
// 平面拟合方法 返回拟合的内点和外点
void PlanarFitting(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in_points,
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out_points) {
// 计算法线
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(
new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(1);
ne.compute(*normals);
// 平面分割
pcl::SACSegmentationFromNormals<pcl::PointXYZ, pcl::Normal> seg;
pcl::ModelCoefficients::Ptr coefficients_plane(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers_plane(new pcl::PointIndices);
pcl::ExtractIndices<pcl::PointXYZ> extract;
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_NORMAL_PLANE);
seg.setNormalDistanceWeight(0.1);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setMaxIterations(500);
seg.setDistanceThreshold(0.3);
seg.setInputCloud(cloud);
seg.setInputNormals(normals);
seg.segment(*inliers_plane, *coefficients_plane);
std::cerr << "Plane coefficients: " << *coefficients_plane << std::endl;
extract.setInputCloud(cloud);
extract.setIndices(inliers_plane);
extract.setNegative(false);
extract.filter(*cloud_in_points);
extract.setNegative(true);
extract.filter(*cloud_out_points);
}
void circle_fitting(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
Eigen::VectorXf& coeff) {
pcl::SampleConsensusModelCircle3D<pcl::PointXYZ>::Ptr circle3D(
new pcl::SampleConsensusModelCircle3D<pcl::PointXYZ>(cloud));
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(
circle3D); // 定义RANSAC算法对象
ransac.setDistanceThreshold(0.1); // 设置距离阈值
ransac.setMaxIterations(1500); // 设置最大迭代次数
ransac.computeModel();
ransac.getModelCoefficients(coeff); // 参数
std::vector<int> ranSacInliers; // 获取属于拟合出的内点
ransac.getInliers(ranSacInliers);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudInliers(
new pcl::PointCloud<pcl::PointXYZ>);
}
int main(int argc, char** argv) {
// 创建可视化界面
pcl::visualization::PCLVisualizer viewer("PCL Viewer");
viewer.setBackgroundColor(0, 0, 0);
// 加载点云数据
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPLYFile("test.ply", *cloud) == -1) {
PCL_ERROR("Couldn't read the PLY file\n");
return (-1);
}
// 可视化原始点云
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_color(
cloud, 255, 255, 255);
viewer.addPointCloud<pcl::PointXYZ>(cloud, cloud_color, "cloud");
viewer.setPointCloudRenderingProperties(
pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "cloud");
// 提取平面内点
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane(
new pcl::PointCloud<pcl::PointXYZ>);
// 提取平面外点(剩余点云)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_remaining(
new pcl::PointCloud<pcl::PointXYZ>);
PlanarFitting(cloud, cloud_plane, cloud_remaining);
PlanarFitting(cloud_remaining, cloud_plane, cloud_remaining);
// 可视化分割出的平面(红色)
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> plane_color(
cloud_plane, 255, 0, 0);
viewer.addPointCloud<pcl::PointXYZ>(cloud_plane, plane_color, "plane");
viewer.setPointCloudRenderingProperties(
pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "plane");
// 可视化剩余点云(绿色)
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
remaining_color(cloud_remaining, 0, 255, 0);
viewer.addPointCloud<pcl::PointXYZ>(cloud_remaining, remaining_color,
"remaining");
viewer.setPointCloudRenderingProperties(
pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "remaining");
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_boundary =
extractBoundary(cloud_plane);
std::cerr << "Boundary points: " << cloud_boundary->size() << std::endl;
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
boundary_color(cloud_boundary, 0, 0, 255);
viewer.addPointCloud<pcl::PointXYZ>(cloud_boundary, boundary_color,
"boundary");
viewer.setPointCloudRenderingProperties(
pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "boundary");
Eigen::VectorXf coeff;
circle_fitting(cloud_boundary, coeff);
std::cout << "圆心的x坐标为: " << coeff[0] << std::endl;
std::cout << "圆心的y坐标为: " << coeff[1] << std::endl;
std::cout << "圆心的z坐标为: " << coeff[2] << std::endl;
std::cout << "圆心的半径为: " << coeff[3] << std::endl;
std::cout << "法线的x方向为: " << coeff[4] << std::endl;
std::cout << "法线的y方向为: " << coeff[5] << std::endl;
std::cout << "法线的z方向为: " << coeff[6] << std::endl;
{
// 显示圆心
pcl::PointXYZ center;
center.x = coeff[0];
center.y = coeff[1];
center.z = coeff[2];
viewer.addSphere(center, 0.05, "circle_center");
// 根据圆参数画圆
// 计算圆的方向向量
Eigen::Vector3f normals(coeff[4], coeff[5], coeff[6]);
normals.normalize();
// 创建一个正交基
Eigen::Vector3f u, v;
if (std::abs(normals[0]) < 0.9) {
u = Eigen::Vector3f(1, 0, 0).cross(normals);
} else {
u = Eigen::Vector3f(0, 1, 0).cross(normals);
}
u.normalize();
v = normals.cross(u);
// 生成圆上的点
pcl::PointCloud<pcl::PointXYZ>::Ptr circle_points(
new pcl::PointCloud<pcl::PointXYZ>);
const int num_points = 100;
for (int i = 0; i < num_points; i++) {
float angle = 2.0f * M_PI * i / num_points;
pcl::PointXYZ point;
point.x = center.x + coeff[3] * (u[0] * cos(angle) + v[0] * sin(angle));
point.y = center.y + coeff[3] * (u[1] * cos(angle) + v[1] * sin(angle));
point.z = center.z + coeff[3] * (u[2] * cos(angle) + v[2] * sin(angle));
circle_points->points.push_back(point);
}
// 添加线段连接圆上的点
for (int i = 0; i < num_points; i++) {
int j = (i + 1) % num_points;
std::string line_id = "line" + std::to_string(i);
viewer.addLine(circle_points->points[i], circle_points->points[j], 0.0,
1.0, 0.0, line_id);
}
// 绘制法线向量
pcl::PointXYZ normal_end;
normal_end.x = center.x + normals[0] * coeff[3] * 1.5;
normal_end.y = center.y + normals[1] * coeff[3] * 1.5;
normal_end.z = center.z + normals[2] * coeff[3] * 1.5;
viewer.addLine(center, normal_end, 1.0, 1.0, 0.0, "normal");
}
// 开始可视化循环
while (!viewer.wasStopped()) {
viewer.spinOnce(100);
}
return 0;
}

















 903
903

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









