



 本文探讨了多目标跟踪(MOT)领域的几个关键算法,包括Sort、DeepSort、MOTDT、ByteTrack和FairMOT。DeepSort通过去除分类层,仅用作特征提取以提高效率。MOTDT引入了候选框得分和细化,防止漏检。ByteTrack依赖于检测结果,其核心是BYTE数据关联方法。FairMOT指出 anchor-based 方法在追踪中的局限。同时,文章提到了Deepsort中的卡尔曼滤波(KF)缺陷及改进策略,如级联匹配和轨迹插值。评价指标如MOTA和IDF1用于衡量跟踪性能。
本文探讨了多目标跟踪(MOT)领域的几个关键算法,包括Sort、DeepSort、MOTDT、ByteTrack和FairMOT。DeepSort通过去除分类层,仅用作特征提取以提高效率。MOTDT引入了候选框得分和细化,防止漏检。ByteTrack依赖于检测结果,其核心是BYTE数据关联方法。FairMOT指出 anchor-based 方法在追踪中的局限。同时,文章提到了Deepsort中的卡尔曼滤波(KF)缺陷及改进策略,如级联匹配和轨迹插值。评价指标如MOTA和IDF1用于衡量跟踪性能。
祖师爷:Sort、DeepSort
deepsort中的reid 去除最后分类用的全连接层,即只利用该网络做特征提取不进行后续分类
2018 MOTDT:Real-Time Multiple People Tracking with Deeply Learned Candidate Selection and Person
MOTDT多目标跟踪论文学习笔记_x_yan033的博客-优快云博客_motdt
核心:候选框Score及Refine;为了避免漏检,所以分级数据关联

2021 ByteTrack
目标跟踪之 MOT 经典算法:ByteTrack 算法原理以及多类别跟踪_kuweicai的博客-优快云博客_多类别跟踪
ByteTrack 的核心在于 BYTE 一种数据关联方法
ByteTrack 没有采用外表特征进行匹配,所以跟踪的效果非常依赖检测的效果,也就是说如果检测器的效果很好,跟踪也会取得不错的效果,但是如果检测的效果不好,那么会严重影响跟踪的效果
(用到工地的话 工人的服装十分相似 所以可能不需要reid)
bug 1. No module named 'yolox' Successfully installed pycocotools-2.0.4 yolox-0.3.0
但是又引起了 cannot import name 'plot_tracking' 貌似是因为yolox版本不对
setup用的是 yolox==0.1.0
新开一个 不要忘记python setup.py develop 就不会有yolox问题
(36条消息) ByteTrack翻译_叫我老安的博客-优快云博客
”低置信度检测框有时指示对象的存在,例如被遮挡的物体。过滤掉这些对象会导致 MOT 出现不可逆转的错误,并带来不可忽略的缺失检测和碎片化轨迹。
byteTrack=yolox+BYTE
Similarity#1(IOU或Re-ID) Similarity#2(单独使用 IoU ) 相似度 分别用在第一次匹配和第二次匹配

评价指标
MOTA综合考虑轨迹中的FN、FP、IDSW的现象(即FP虚检、FN漏检、ID交换)更加注重检测
IDF1则是综合考虑IDP和IDR(综合ID准确率和ID召回率)
与MOTA不同的是,IDF1中的TP、FP、FN这些指标,是考虑进ID信息的,而MOTA中仅IDSW项考虑了ID信息。从这个角度讲,IDF1对轨迹中ID信息的准确性更敏感
2019 JDE(Towards Real-Time Multi-Object Tracking)
问题:deepsort等mot都是检测后跟踪
【多目标跟踪论文阅读笔记——JDE(Towards Real-Time Multi-Object Tracking)】_书玮嘎的博客-优快云博客_jde多目标跟踪
FairMot
(35条消息) 论文阅读-FairMOT:《A Simple Baseline for Multi-Object Tracking》_DJames23的博客-优快云博客_fairmot论文
这篇论文讲到anchor-based不适合做目标追踪
BoT-SORT: Robust Associations Multi-Pedestrian Tracking
Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking
主要改进KF
估计噪声-> OCM *
误差累积-> OOS (没看懂)
以估计为中心 -> OCR
IOU匹配:计算检测框和预测框之间的iou,1-iou得到cost matrix,把cost matrix作为匈牙利算法的输入,得到线性匹配的结果
但是级联匹配的cost matrix包含了运动特征(lamda=0)和外观特征
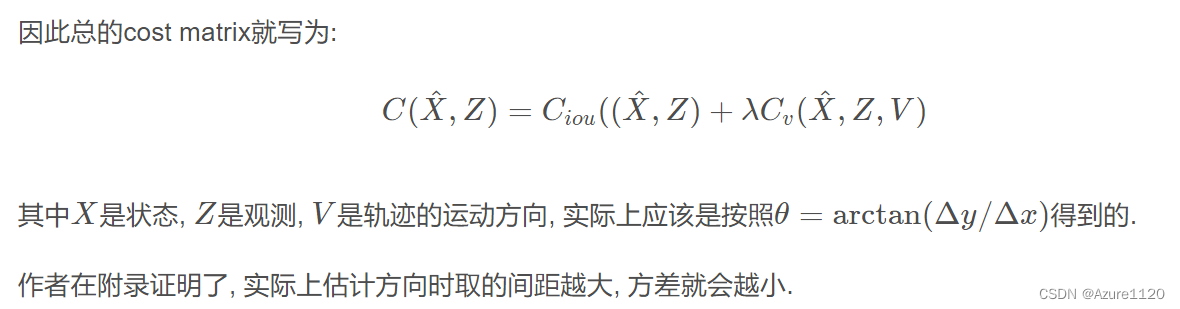
下图为OOS 额外加入了轨迹的运动方向
deepsort中KF的缺陷:
Deep sort算法论文解读_mini猿要成长QAQ的博客-优快云博客_deepsort论文解读
解决措施:用级联匹配
但是bytetrack ocsort中同样存在 并且为了解决误差累积 他们解决用的是轨迹插值 而不是最多30次的kf
意义:获取更好的KF估计

















 1174
1174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









