







0.前言
详细步骤已经放在我的古月居账号那边,具体如何搭建请跳转:古月居 - ROS机器人知识分享社区
我在网上找了一圈都没有看到有人教如何使用gazebo对宇树机器狗go2进行仿真实验环境构建,所以本期博客帮助大家进行宇树机器狗go2的gazebo仿真环境搭建。
1.仿真启动
1.启动
roslaunch unitree_guide gazeboSim.launch rname:=go2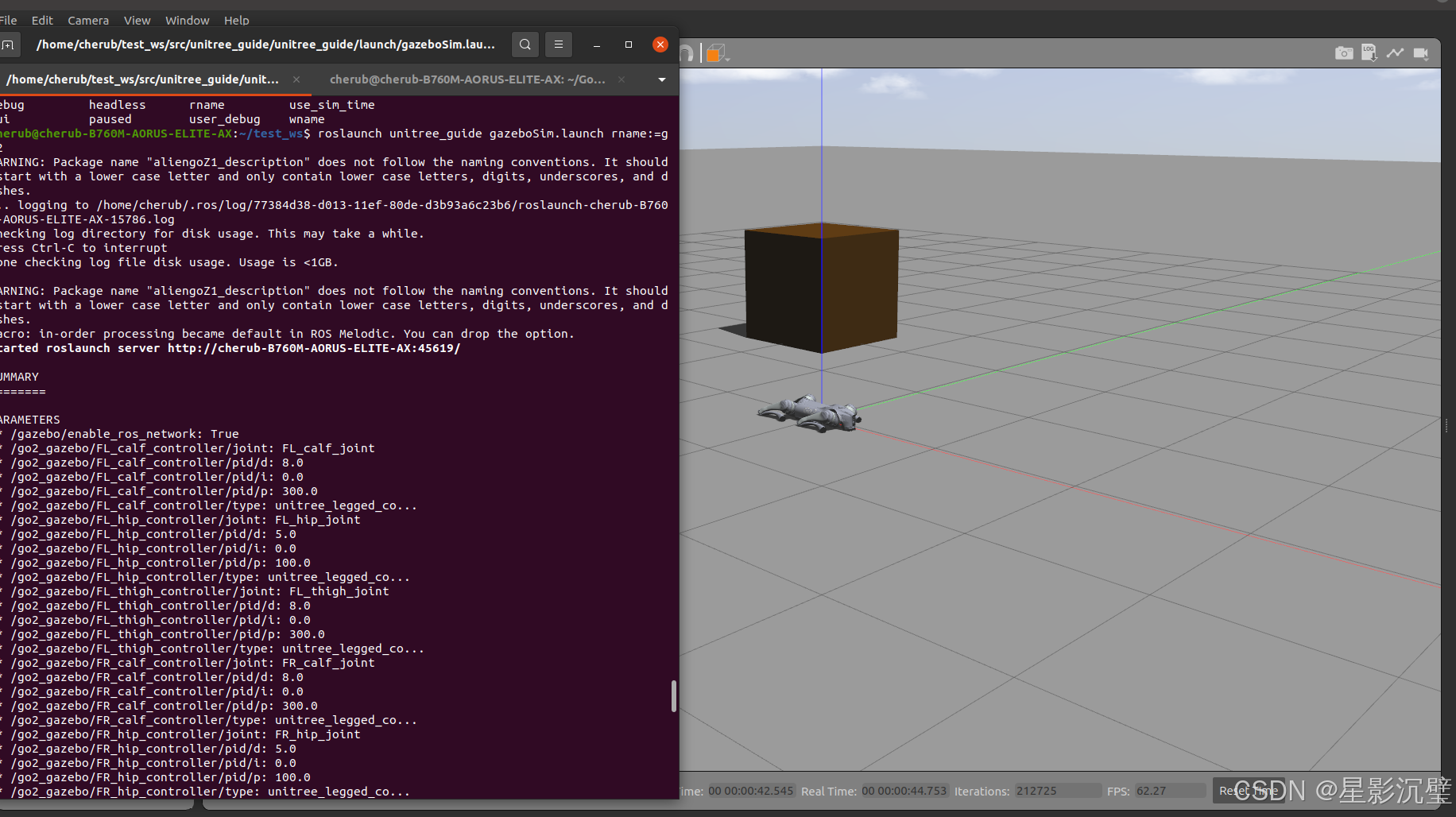
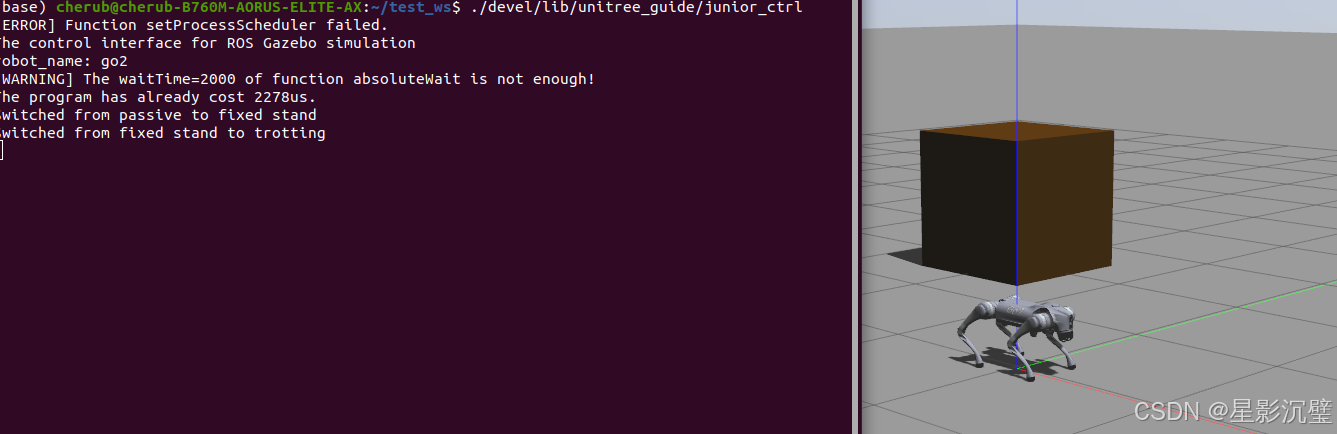
3.启动控制
./devel/lib/unitree_guide/junior_ctrl按键2是站立,按键4是行走模式,按下4键后就可以使用方向wasd键进行运动控制了,jl进行转向控制。

















 7625
7625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









