









一、探究目标
1.运用中断点灯
1)用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。如果完成后,尝试在main函数while循环中加入一个串口每隔1s 发送一次字符的代码片段,观察按键中断对串口发送是否会带来干扰或延迟。
2.中断实现串口收发
(1)当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”(提示:采用一个全局标量做信号灯);
(2)当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”(提示:要将接收到的连续字符保存到一个字符数组里,进行判别匹配。写一个接收字符串的函数。
二、中断原理
2.1 中断
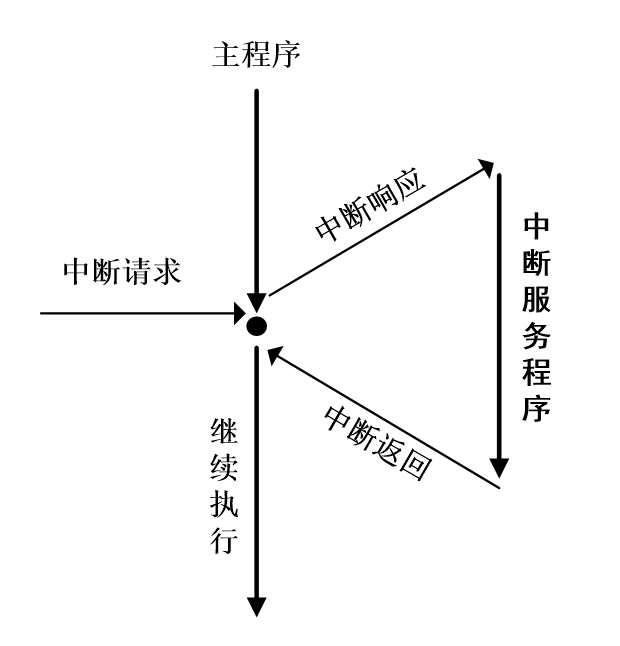
计算机在执行程序过程中,当出现异常情况(断电等)或特殊请求(数据传输等)时,计算机暂停现行程序的运行,转向对这些异常情况或特殊请求进行处理,处理完毕后再返回到现行程序的中断处,继续执行原程序,这就是“中断”。
2.1.1 中断处理流程
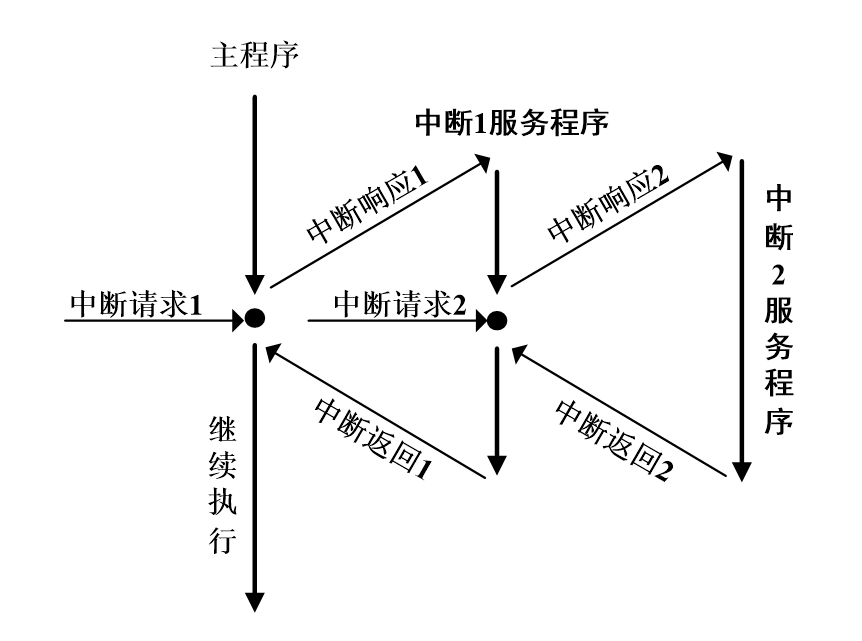
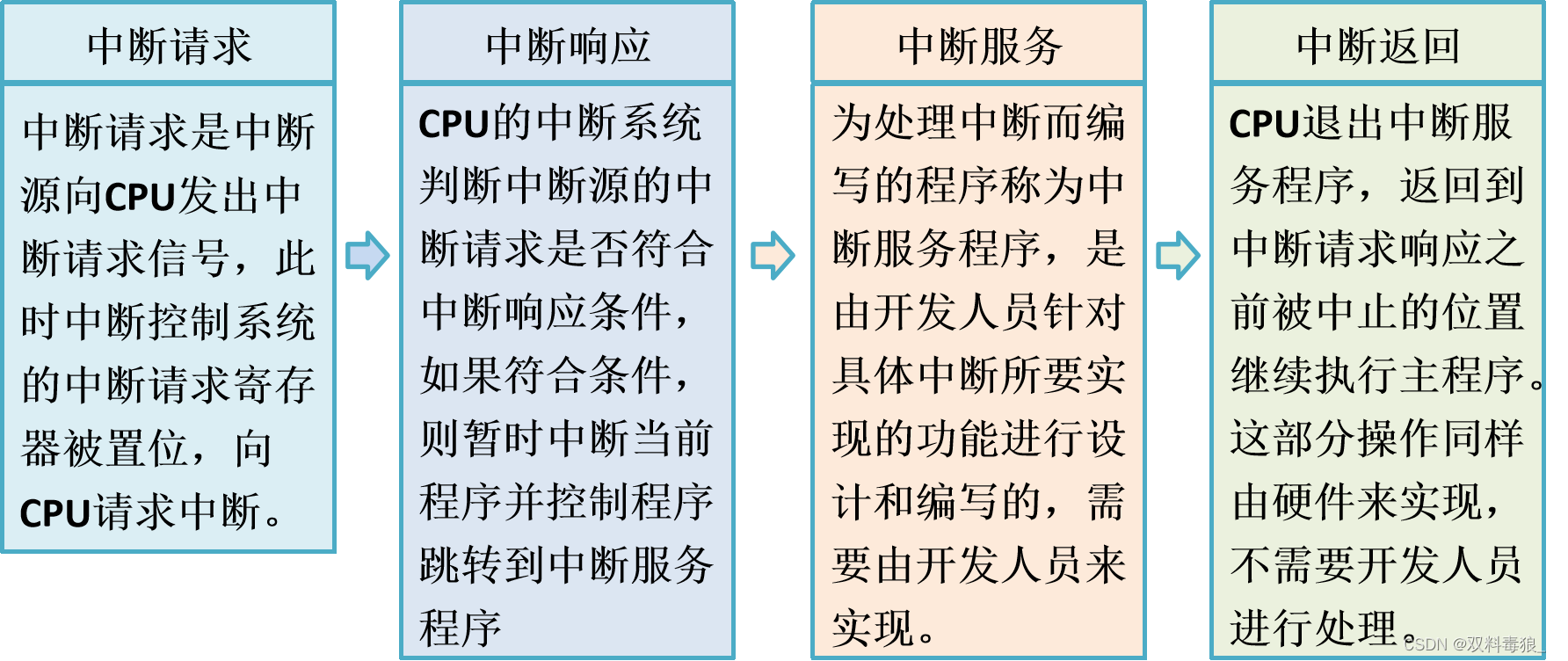
中断处理流程:中断请求、中断响应、中断服务和中断返回。
2.1.2 STM32的内部中断处理机制
STM32F103系列芯片只有60个可屏蔽中断。
2.1.3 STM32中断优先级
STM32使用Cortex-M3的8位优先级寄存器中的4位来配置中断优先级,即STM32中的NVIC只支持16级中断优先级的管理。
用于设置中断的优先级分组,此函数只有一个参数NVIC_PriorityGroup,其取值共有5组,每组的抢占优先级和响应优先级所占位数均不同,取值范围不同。
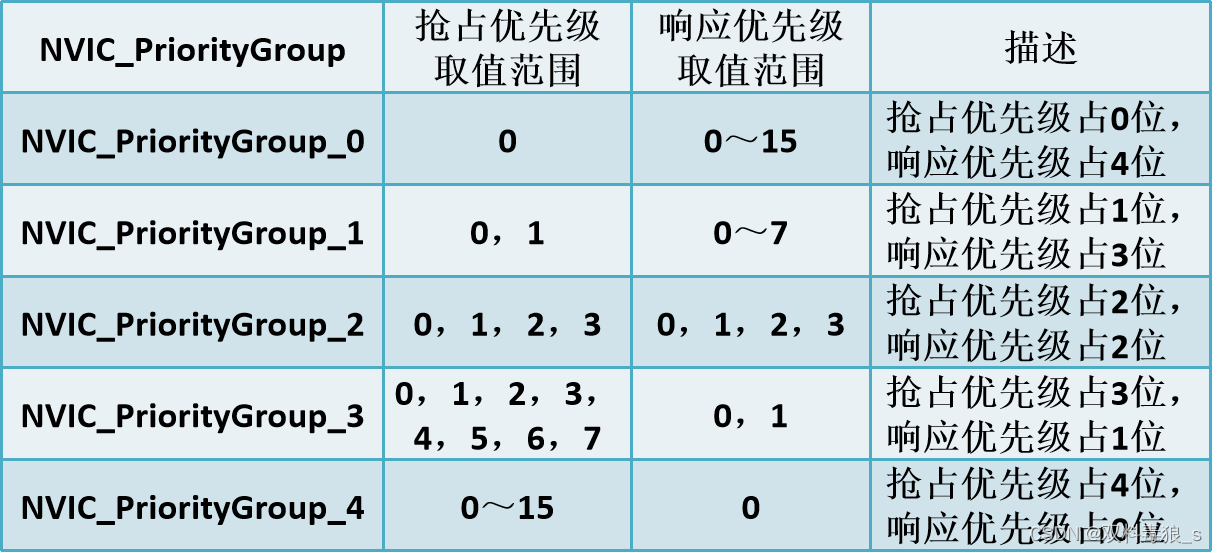
中断优先级判断原则:
- 中断优先级的数值越小,优先级级别越高;
- 抢占优先级的优先级总是高于响应优先级;
- 高抢先优先级的中断可以打断低抢先优先级的中断服务,构成中断嵌套;
- Reset NMI Hard Fault的优先级为负,且不可修改,高于普通的中断优先级。
- 中断优先级判断:先判断抢占优先级的大小,如果抢占优先级相同,则比较响应优先级的大小,若抢占优先级和响应优先级均相同,则根据中断向量表中的顺序来决定;
中断向量表
当发生了异常或中断,内核要想响应这些异常或中断,就需要知道这些异常或中断的服务程序的入口地址,再由入口地址找到相应的中断服务程序,由中断入口地址组成的表称作中断向量表。
入口地址一般存放在程序存储器(ROM),默认情况下,Cortex-M3内核的中断向量表从零地址处开始,且每个向量占用4个字节。
STM32将中断服务程序统一放在标准外设库stm32f10x_it.c文件中,其中的每个中断服务函数都只有函数名,函数体都是空的,需要用户自己编写相应的函数体,但中断服务程序的函数名是不能更改的。
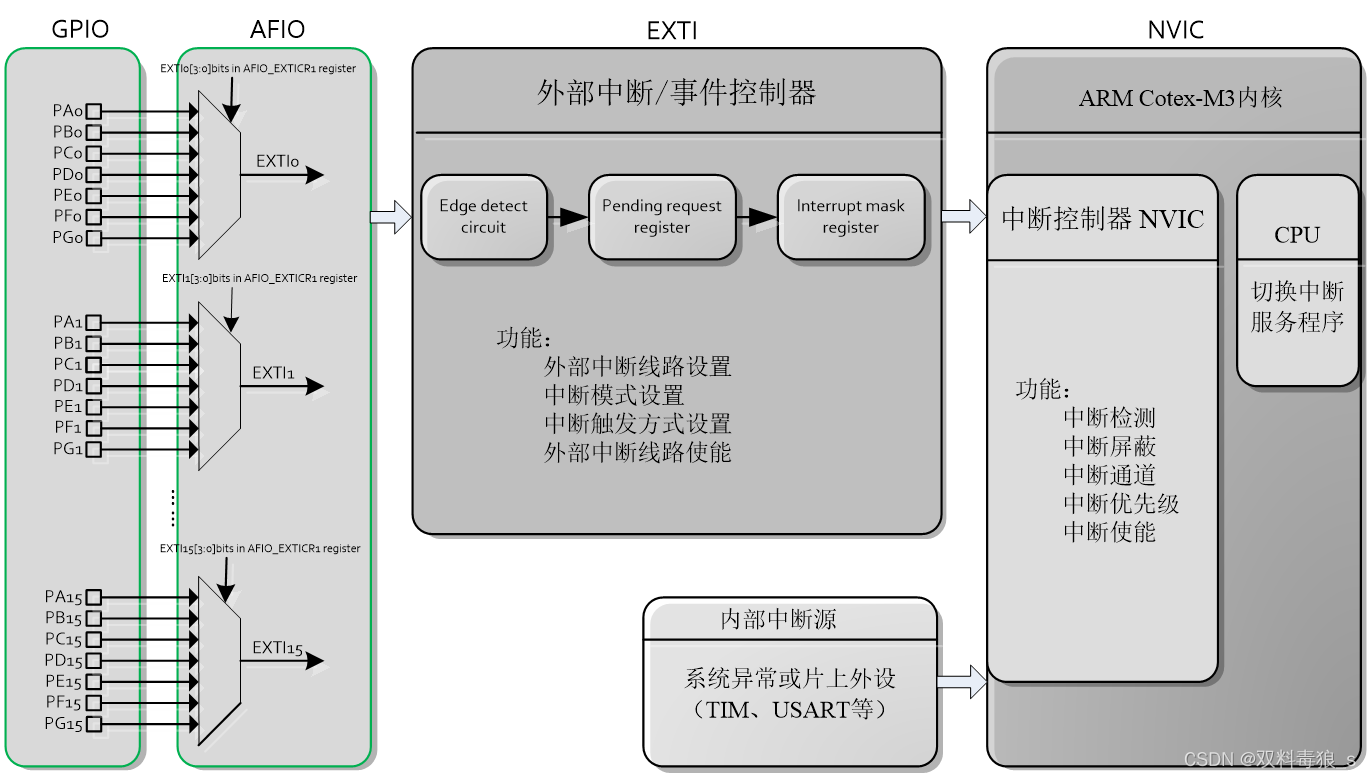
2.2 EXTI
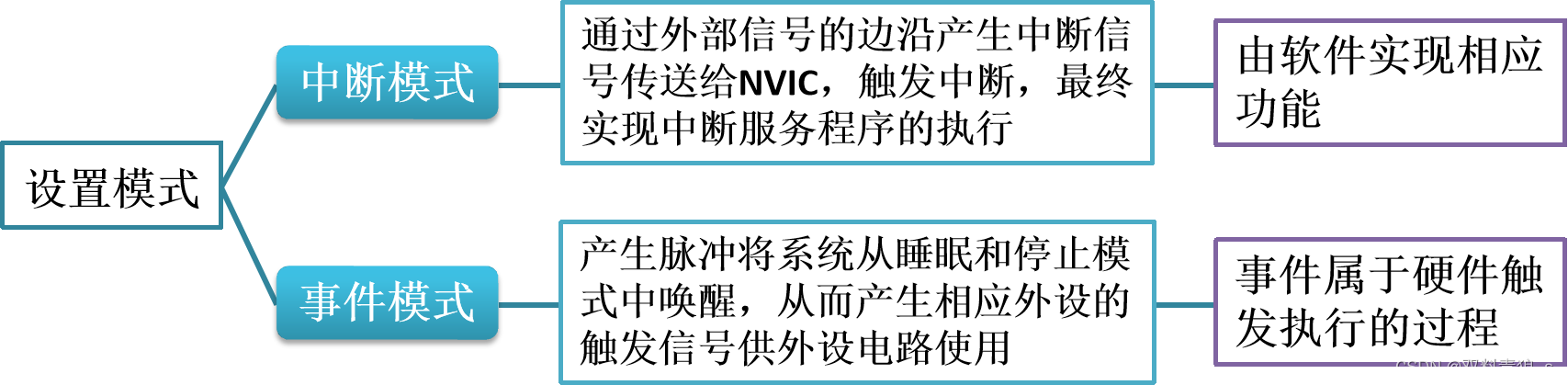
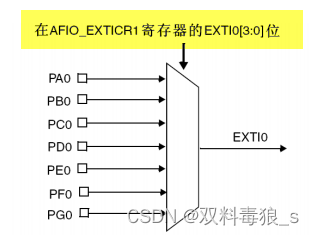
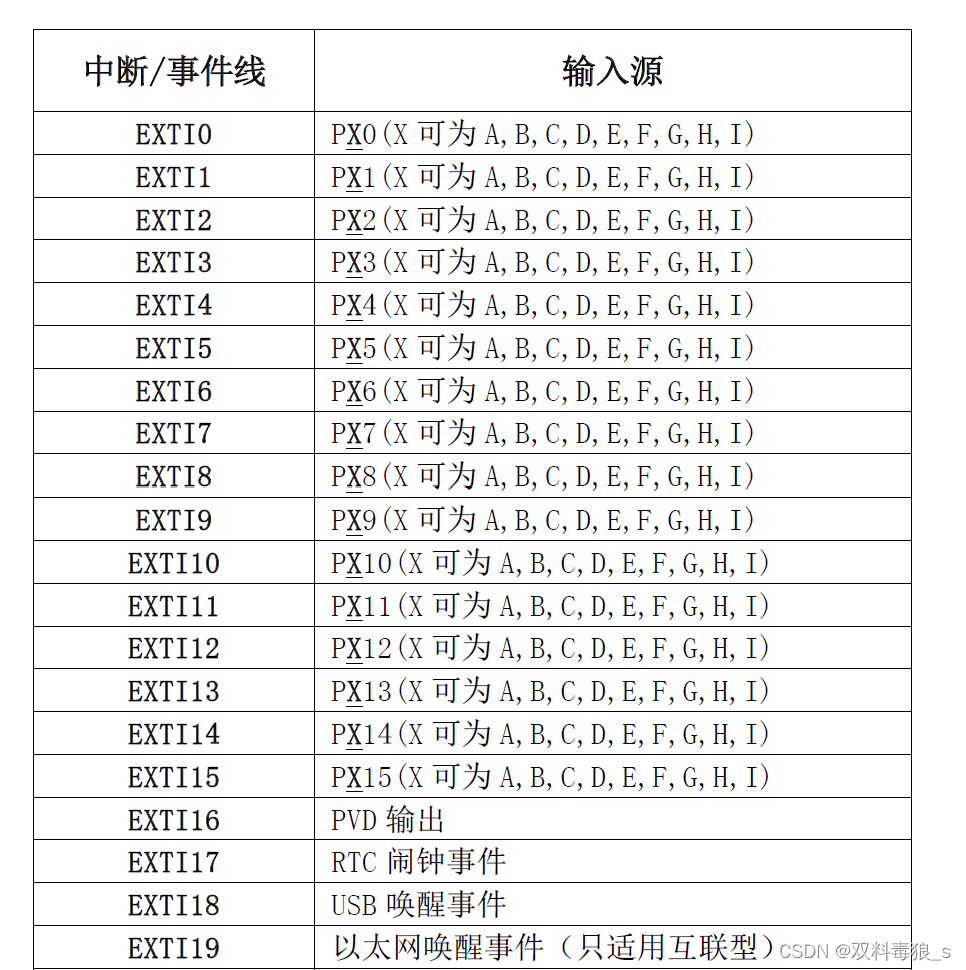
EXTI(External interrupt/event controller,外部中断/事件控制器)支持19个外部中断/事件请求,每个中断/事件都有独立的触发和屏蔽设置,具有中断模式和事件模式两种设置模式。
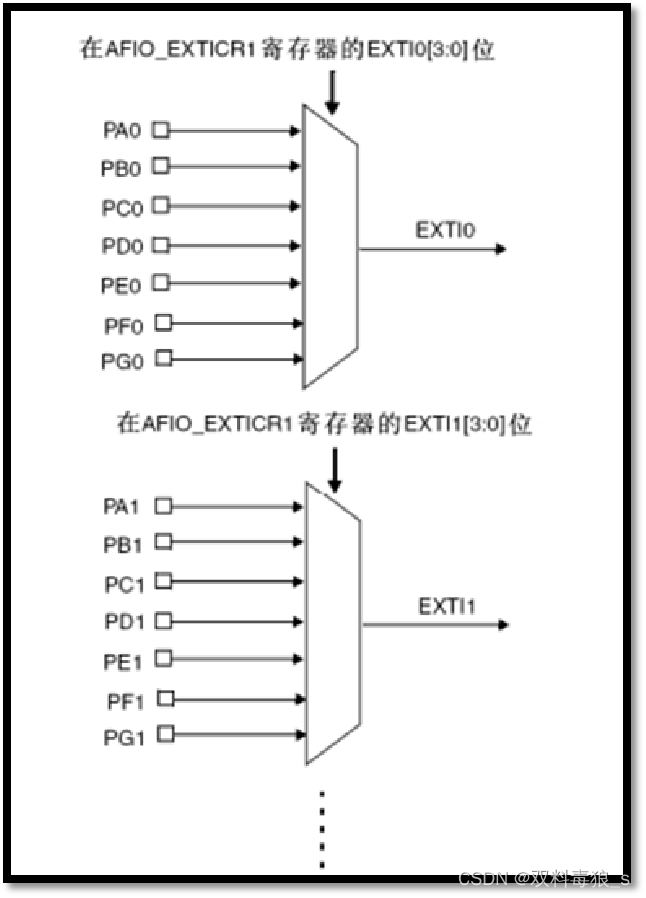
STM32芯片之外的外设的中断(I/O端口)由EXTI和NVIC共同负责,即STM32的每一个GPIO引脚都可以配置成一个外部中断触发源。
GPIO的中断是以组为单位的,同组的外部中断公用一条外部中断线。

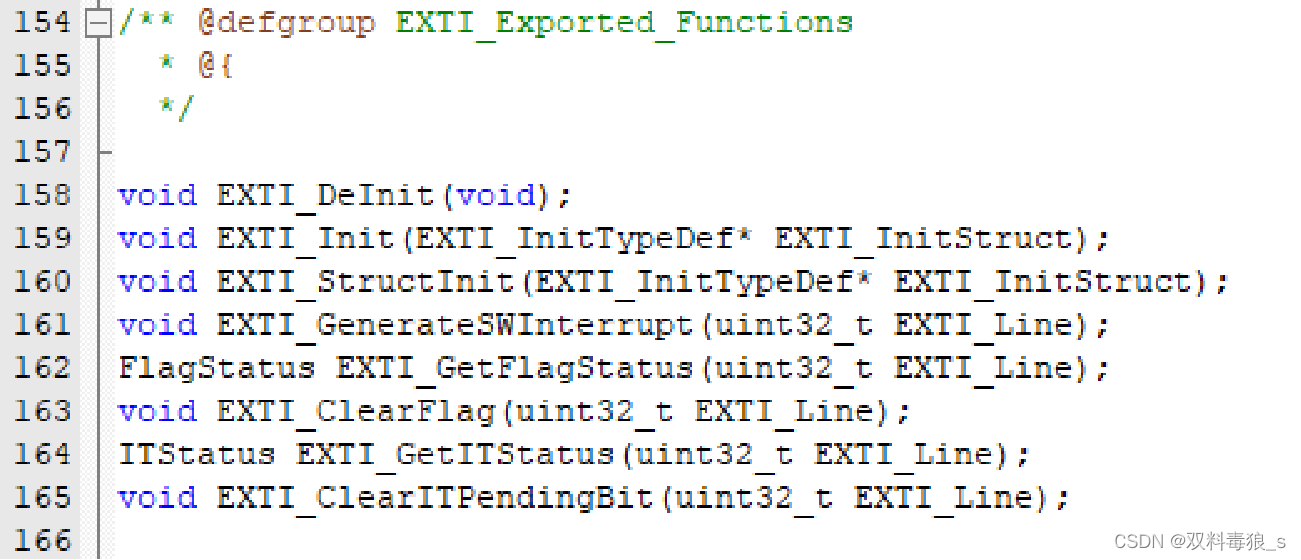
2.2.1 EXTI标准外设库接口函数
标准外设库的stm32f10x_exti.c文件定义了EXTI相关的库函数。
| 函数 | 作用 |
|---|---|
| EXTI_Init | 定义了EXTI_InitTypeDef结构体 |
| EXTI_GetITStatus | 用于检查指定的EXTI线路触发请求发生与否,返回值:SET或RESET |
| EXTI_ClearITPendingBit | 用于清除EXTI线路挂起位 |
| GPIO_EXTILineConfig | 用于选择GPIO管脚用作外部中断线路 |
typedef struct
{
uint32_t EXTI_Line;
//中断/事件线:指定某个具体的外部中断线路,如外部中断线0,EXTI_Line0
EXTIMode_TypeDef EXTI_Mode;
//EXTI模式:EXTI_Mode_Interrupt或EXTI_Mode_Event
EXTITrigger_TypeDef EXTI_Trigger;
//触发类型:用于设置外部中断的触发方式,上升沿触发或下降沿触发等
FunctionalState EXTI_LineCmd;
//EXTI使能:用于使能或失能外部中断线路,取值为ENABLE或DISABLE
}EXTI_InitTypeDef;
2.2.1 EXTI标准外设库中断配置步骤
从之前的图可以看到,外部中断的信号从GPIO到AFIO、EXTI再到NVIC。
因此,我们的代码也是按照这个顺序编写。
void EXTI_Init(void)
{
//1.开启I/O端口的时钟和复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//2.GPIO初始化配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//3.设置I/O引脚与中断线路的映射关系
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
//4.初始化EXTI,配置EXTI相关参数并使能
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
//5.配置NVIC优先级分组的函数
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//6.初始化NVIC,配置NVIC参数并使能
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
//7.编写中断服务程序
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET)
{
GPIO_WriteBit(GPIOB,GPIO_Pin_9,(BitAction)((1-GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_9))));
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
注意:在实验3.1配置过程中,按键所连引脚为PB0,所以EXTI0。如果你要设置PB9,就要用EXTI9。
三、代码实现
3.1 中断控制LED
3.1.1 LED.c
#ifndef __LED_H
#define __LED_H
void LED_Init(void);
#endif
3.1.2 LED.c
#include "stm32f10x.h" // Device header
void LED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_9);
}
3.1.3 Key.h
#ifndef __KEY_H
#define __KEY_H
void Key_EXTI_Init(void);
#endif
3.1.4 Key.c
#include "stm32f10x.h" // Device header
void Key_EXTI_Init(void)
{
//1.开启I/O端口的时钟和复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//2.GPIO初始化配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//3.设置I/O引脚与中断线路的映射关系
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
//4.初始化EXTI,配置EXTI相关参数并使能
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
//5.配置NVIC优先级分组的函数
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//6.初始化NVIC,配置NVIC参数并使能
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
//7.编写中断服务程序
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET)
{
GPIO_WriteBit(GPIOB,GPIO_Pin_9,(BitAction)((1-GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_9))));
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
3.1.5 main.c
#include "stm32f10x.h" // Device header
#include "Key.h"
#include "Led.h"
int main(void)
{
LED_Init();
Key_EXTI_Init();
while (1)
{
}
}
3.2 中断对串口发送的影响
3.2.1 完整代码
#include "stm32f10x.h" // Device header
#include "Key.h"
#include "Led.h"
#include "Delay.h"
void UART_Init(void)
{
//1.开启GPIOA和USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
//2.结构体定义
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
//3.USART设置RX/TX
//USART1_TX,默认情况下复用PA9引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX,默认情况下复用PA10引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
//4.USART1参数配置
USART_InitStructure.USART_BaudRate = 9600;
//设置波特率为9600
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位占8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1位停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无校验
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
//5.初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
}
//串口发送字符串函数
void USART_SendString(USART_TypeDef* USARTx, uint8_t *str)
{
while (*str)
{
USART_SendData(USARTx, *str++);
// 等待发送完成
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
}
}
int main(void)
{
LED_Init();
Key_EXTI_Init();
char *str = "hello windows!";
UART_Init();
while(1)
{
USART_SendString(USART1, "hello windows!\r\n");//发送字符串
// 等待一段时间,以便在串口调试工具中可以看到消息之间的间隔
Delay_ms(1000);
}
}
3.2.2
通过实际操作我们可以看到,按键确实会对串口发送带来干扰以及延迟,但是这个干扰和延迟是比较小的。
3.3 串口中断控制LED
3.3.1 核心代码(串口中断)
// 串口中断服务函数
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
// 读取接收到的字符
uint8_t RxData = (char)USART_ReceiveData(USART1);
// 根据接收到的字符设置信号灯
if(RxData=='t'){
sendFlag = 1;
}// 开始发送
else if(RxData=='s') {
sendFlag = 0;
}// 停止发送
LED_judge(sendFlag);
// 清除中断标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
3.3.2 完整代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include <stdio.h>
// 定义信号灯全局变量
volatile uint8_t sendFlag = 1; // 0表示不发送,1表示发送
// UART初始化函数
void UART_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
//5.初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
}
void SendString(USART_TypeDef* USARTx, uint8_t *str) {
while (*str)
{
USART_SendData(USARTx, *str++);
// 等待发送完成
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
}
}
void LED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_9);
}
void LED_judge(uint8_t sendFlag)
{
if(sendFlag){
GPIO_SetBits(GPIOB,GPIO_Pin_9);
}else{
GPIO_ResetBits(GPIOB,GPIO_Pin_9);
}
}
// 主函数
int main(void) {
UART_Init();
while (1) {
if (sendFlag == 1) {
SendString(USART1, "hello windows!\r\n");
// 可以在这里添加适当的延时,例如Delay_ms(2000);
Delay_ms(2000);
}
}
}
// 串口中断服务函数
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
// 读取接收到的字符
uint8_t RxData = (char)USART_ReceiveData(USART1);
// 根据接收到的字符设置信号灯
if(RxData=='t'){
sendFlag = 1;
}// 开始发送
else if(RxData=='s') {
sendFlag = 0;
}// 停止发送
LED_judge(sendFlag);
// 清除中断标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
3.4 串口接收长字符串
3.4.1 串口接收长字符串
// 处理接收到的命令
void ProcessCommand(void) {
if (strncmp(rxBuffer, "stop stm32!", 11) == 0) {
sendFlag = 0; // 停止发送
} else if (strncmp(rxBuffer, "go stm32!", 10) == 0) {
sendFlag = 1; // 开始发送
}
}
3.4.2 完整代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include <stdio.h>
volatile uint8_t sendFlag=1;
// 定义接收缓冲区大小和接收缓冲区
#define RX_BUFFER_SIZE 20
char rxBuffer[RX_BUFFER_SIZE];
uint8_t rxIndex = 0;
void UART_Init(void)
{
//1.开启I/O端口的时钟和复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//2.GPIO初始化配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//3.设置I/O引脚与中断线路的映射关系
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
//4.初始化EXTI,配置EXTI相关参数并使能
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
//5.配置NVIC优先级分组的函数
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//6.初始化NVIC,配置NVIC参数并使能
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
// 处理接收到的命令
void ProcessCommand(void) {
if (strncmp(rxBuffer, "stop stm32!", 11) == 0) {
sendFlag = 0; // 停止发送
} else if (strncmp(rxBuffer, "go stm32!", 10) == 0) {
sendFlag = 1; // 开始发送
}
}
// 串口中断服务函数
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
// 读取接收到的字符
char receivedChar = (char)USART_ReceiveData(USART1);
// 添加字符到接收缓冲区
if (rxIndex < RX_BUFFER_SIZE - 1) {
rxBuffer[rxIndex++] = receivedChar;
}
// 检查是否接收完毕(假设以换行符结束)
if (receivedChar == '\n') {
rxBuffer[rxIndex] = '\0'; // 字符串结束符
ProcessCommand(); // 处理接收到的命令
rxIndex = 0; // 重置索引,准备接收下一条命令
}
// 清除中断标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
//串口发送字符串函数
void USART_SendString(USART_TypeDef* USARTx, uint8_t *str)
{
while (*str)
{
USART_SendData(USARTx, *str++);
// 等待发送完成
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
}
}
int main(void)
{
UART_Init();
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 使能USART1的接收中断
char sendBuffer[] = "hello windows!\r\n"; // 发送的字符串,加上回车和换行
while (1) {
if (sendFlag == 1) {
USART_SendString(USART1, sendBuffer);
Delay_ms(2000); // 发送间隔
}
}
}
四、探究总结
在实际硬件操控时,会遇到很多情况。比如本次探究中,就发现下载代码后并没有按照预想的那样实现功能,可以试试
1.按下Stm32的RESET复位键。
2.如果是无法收发串口信息,可以先按复位观察,如果没反应就更换串口助手软件。
3.检查代码中的波特率。
4.更换硬件。
以上则是我本次探究的全部内容,如有错漏请各位大佬留言指正。

















 9007
9007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









