







目录
一、实验目的
本实验旨在通过使用STM32F103ZET6单片机实现串口通信,加深对STM32单片机串口通信原理及操作的理解,并掌握串口通信在嵌入式系统中的应用。
二、实验原理
串口通信是一种通过串行数据线进行数据传输的通信方式。STM32F103ZET6单片机具有多个串口模块,其中USART(通用同步/异步收发传输器)模块可以用于串口通信。USART包含了发送和接收数据的寄存器、波特率发生器、时钟控制等功能。
在STM32F103ZET6串口通信中,需要配置串口的参数,包括波特率、数据位、停止位、校验位等。然后通过编程控制串口发送和接收数据,实现单片机与其他外部设备(如电脑)之间的数据传输。
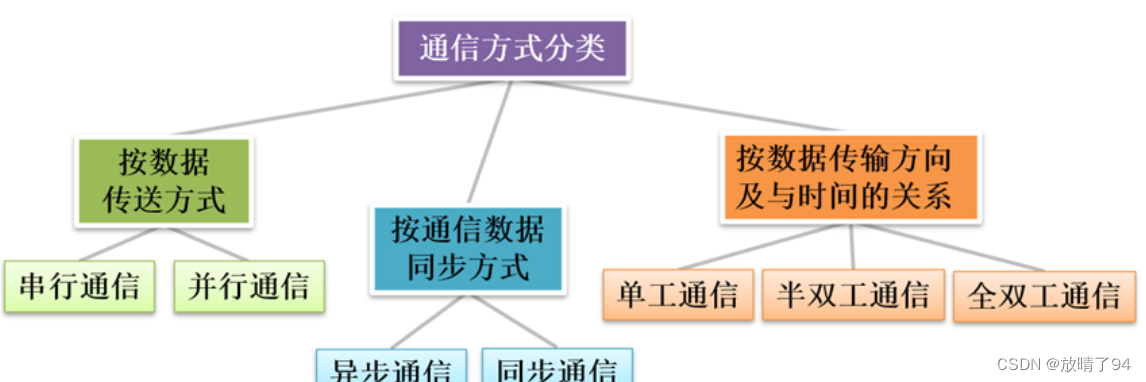
2.1通信的两种方式:
2.1.1并行通信
-传输原理:数据各个位同时传输。
-优点:速度快
-缺点:占用引脚资源多
2.1.2串行通信
-传输原理:数据按位顺序传输。
-优点:占用引脚资源少
-缺点:速度相对较慢
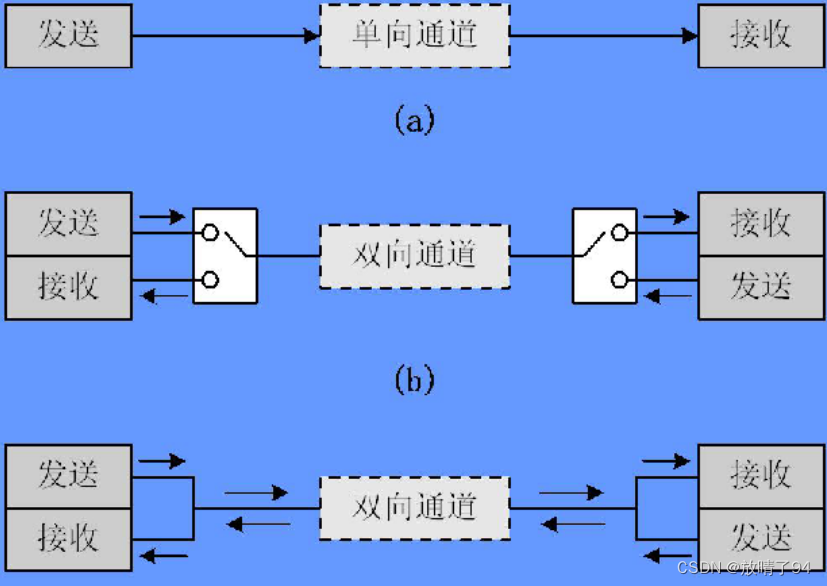
2.2串行通信分类(按照数据传送方向)
2.2.1单工(a):
数据传输只支持数据在一个方向上传输
2.2.2半双工(b):
允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信;
2.2.3全双工(c):
允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。
原文链接:https://blog.youkuaiyun.com/weixin_42645653/article/details/113341598
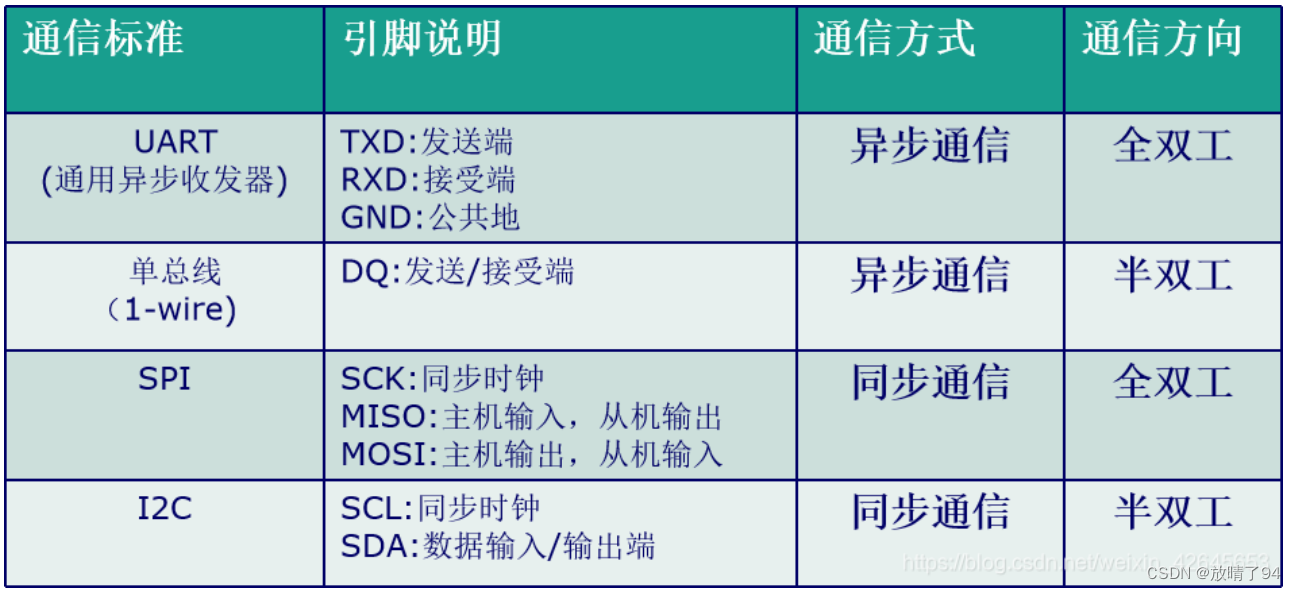
2.3串行通信的通信方式
2.3.1同步通信(带时钟同步信号传输):
SPI,IIC通信接口
2.3.2异步通信(不带时钟同步信号传输):
UART(通用异步收发器),单总线
2.4 异步串行通信协议
异步串行通信标准的数据帧由起始位、数据位、校验位、停止位四部分组成。数据传输速率为50、75、100、150、300、600、1200、2400、4800、9600、19200和38400波特。
起始位:占一位,位于数据帧的开头,以逻辑“0”表示传输数据的开始。
数据位:要发送的数据,数据长度可以是5~8位。
校验位:占一位,用于检测数据是否有效。
停止位:一帧传送结束的标志,根据实际情况定,可以是1、1.5或2位。
空闲位:数据传输完毕,用“1”表示当前线路上没有数据传输。
原文链接:https://blog.youkuaiyun.com/weixin_52411606/article/details/122738116
三、编程步骤
3.1STM32 USART编程模式
3.1.1轮询模式
CPU不断地查询I/O设备是否准备就绪,如果准备就绪就发送,否则提示超时错误;会占用CPU的大量时间,效率低。
3.1.2 中断方式
通过中断请求线,在I/O设备准备就绪时向CPU发出中断请求,CPU中止正在进行的工作转向处理I/O设备的中断事件;中断方式相比轮询方式效率较高。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









