







前言

在多机器人系统中,多个机器人需要在同一环境中同时进行导航、自主定位和任务协作。AMCL(Adaptive Monte Carlo Localization,自适应蒙特卡洛定位)作为基于粒子滤波的高效定位算法,广泛应用于机器人在已知地图中的自定位。然而,默认 AMCL 通常仅支持单机器人定位,在多机器人场景下,因坐标变换冲突、粒子分布混乱以及 ROS 话题命名空间未隔离等问题,难以直接应用。
本章将深度讲解 AMCL 在多机器人系统中的支持及其实现,包括解决问题的方法、多机器人 AMCL 的实现流程及关键点,最后通过实例和代码展示完整实现,帮助读者理解和部署多机器人 AMCL 系统。
原理介绍
1. 多机器人 AMCL 的核心问题
-
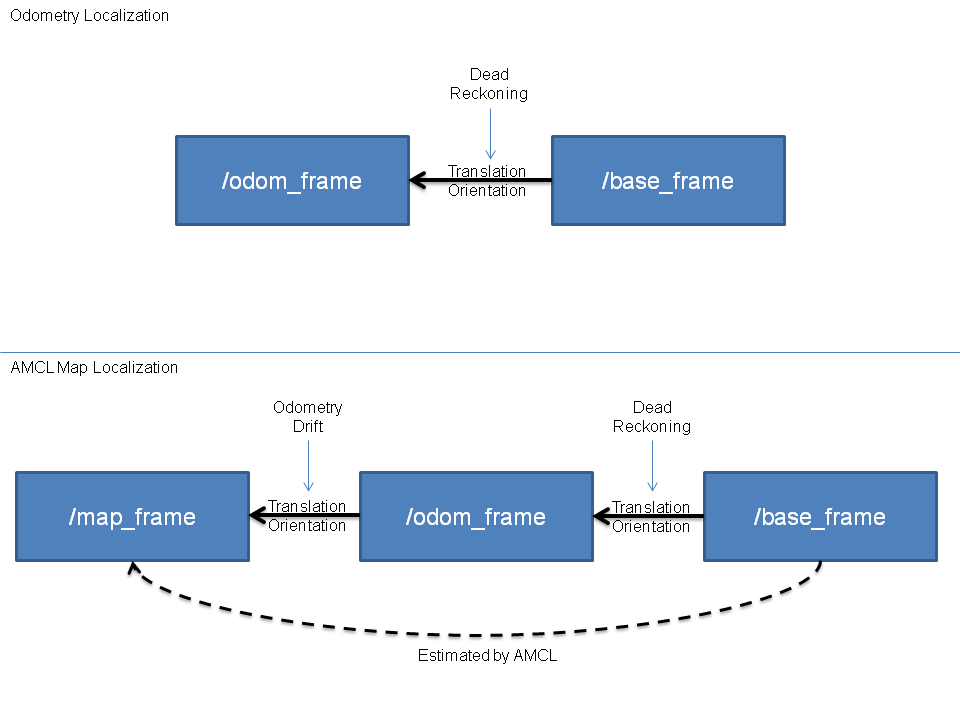
坐标系冲突: 每个机器人都有独立的
base_link、odom和map坐标系。如果不加区分,多机器人定位可能导致坐标系混淆。 -
话题冲突: 多个机器人需要使用相同的传感器数据话题(如
/scan、/odom),这些话题在 ROS 中无法直接共享,需通过命名空间隔离。 -
粒子滤波冲突: AMCL 粒子滤波器需要为每个机器人独立运行,以避免多个机器人的粒子分布相互干扰。
2. 解决方案
-
命名空间隔离: 为每个机器人分配独立的命名空间,如
/robot1和/robot2,隔离各自的话题、参数和坐标系。 -
独立 AMCL 实例: 每个机器人运行一个独立的 AMCL 节点实例,粒子滤波器在各自的实例中独立执行。
-
多传感器支持: 支持每个机器人使用独立的激光雷达数据(
/robot1/scan和/robot2/scan),并融合里程计、IMU 数据进行更精确的定位。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









