




1.信号
1.1概念
(1)信号是在软件层次上对中断机制的一种模拟,是一种异步通信方式。
(2)信号可以直接进行用户空间进程和内核进程之间的交互,内核进程也可以利用它来通知用户空间进程发生了哪些系统事件。
(3)3)如果该进程当前并未处于执行态,则该信号就由内核保存起来,直到该进程恢复执行再传递给它;如果一个信号被进程设置为阻塞,则该信号的传递被延迟,直到其阻塞被取消时才被传递给进程。
信号的声明周期:
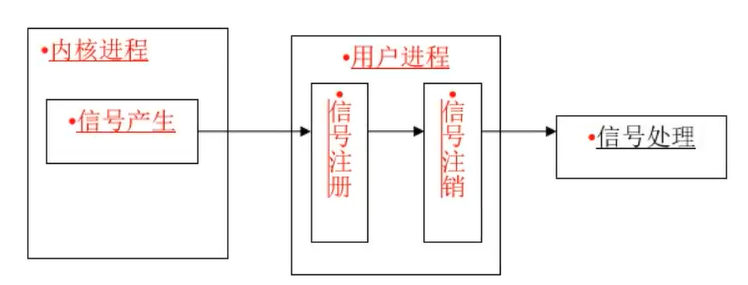
1.2信号的相应方式
1)忽略信号:对信号不做任何处理,但是有两个信号不能忽略:即SIGKILL及SIGSTOP。
2)捕捉信号:定义信号处理函数,当信号发生时,执行相应的处理函数。
3)执行缺省操作:Linux对每种信号都规定了默认操作
1.3信号种类
SIGINT(2):中断信号,Ctrl-C 产生,用于中断进程
SIGQUIT(3):退出信号, Ctrl-\ 产生,用于退出进程并生成核心转储文件
SIGKILL(9): 终止信号,用于强制终止进程。此信号不能被捕获或忽略。
SIGALRM(14):闹钟信号,当由 alarm() 函数设置的定时器超时时产生。
SIGTERM(15):终止信号,用于请求终止进程。此信号可以被捕获或忽略。termination
SIGCHLD(17):子进程状态改变信号,当子进程停止或终止时产生。
SIGCONT(18):继续执行信号,用于恢复先前停止的进程。
SIGSTOP(19):停止执行信号,用于强制停止进程。此信号不能被捕获或忽略。
SIGTSTP(20):键盘停止信号,通常由用户按下 Ctrl-Z 产生,用于请求停止进程。
2函数接口
2.1信号的发送与挂起
#include <signal.h>
int kill(pid_t pid, int sig);
功能:给指定进程发送信号
参数:pid:指定进程
sig:要发送的信号
返回值:成功:0
失败:-1
int raise( int sig);
功能:向当前进程发送信号
参数:sig:信号
返回值: 成功:0
失败:-1
相当于:kill(getpid(),sig);
int pause(void);
功能:用于将调用进程挂起,直到收到被捕获处理的信号为止。
#include <sys/types.h>
#include <signal.h>
#include <stdio.h>
#include <unistd.h>
int main(int argc, char const *argv[])
{
kill(getpid(), SIGKILL); // 给当前进程发送一个SIGKILL信号
// raise(SIGKILL); // 给当前进程发送一个SIGKILL信号
pause(); // 将进程挂起,作用和死循环类似,但是不占用CPU
while (1)
;
return 0;
}
2.2定时器
unsigned int alarm( unsigned int seconds)
功能:功能:在进程中设置一个定时器。 当定时器指定的时间到了时,它就向进程发送SIGALARM信号。系统对SIGALARM信号默认处理方式是退出进程。
参数:参数: seconds: 定时时间,单位为秒
返回值:返回值:如果调用此alarm()前,进程中已经设置了闹钟时间,则返回上一个闹钟时间的剩余时间,否则返回0。
注意:注意:一个进程只能有一个闹钟时间。如果在调用alarm时已设置过闹钟时间,则之前的闹钟时间被新值所代替。
常用操作:取消定时器alarm(0),返回旧闹钟余下秒数。
注意:
系统默认对SIGALRM(闹钟到点后内核发送的信号)信号的响应: 如果不对SIGALRM信号进行捕捉或采取措施,默认情况下,闹钟响铃时刻会退出进程。
#include <unistd.h>
#include <stdio.h>
#include<signal.h>
int main(int argc, char const *argv[])
{
printf("%d \n", alarm(10)); // 设置闹钟十秒,到点会向当前进程发送SIGKILL信号,第一次调用,返回值为0;
sleep(2); // 睡眠两秒,此时闹钟还剩八秒
printf("%d \n", alarm(2)); // 设置闹钟两秒,到点会向当前进程发送SIGKILL信号,第二次调用,返回值为上次闹钟的剩余秒数;
// 以最后一次闹钟为准
pause(); // 闹钟响后进程直接退出,所以挂起肯定也结束了
return 0;
}
2.3信号处理函数 signal()
typedef void( *sighandler_t)(int);
sighandler_t signal( int signum, sighandler_t handler);
功能:信号处理函数
参数:signum:要处理的信号
handler:信号处理方式
SIG_IGN:忽略信号 (忽略 ignore)
SIG_DFL:执行默认操作 (默认 default)
handler:捕捉信号 (handler为函数名,可以自定义)
void handler( int sig){} //函数名可以自定义, 参数为要处理的信号
返回值:成功:设置之前的信号处理方式
失败:-1
3.练习
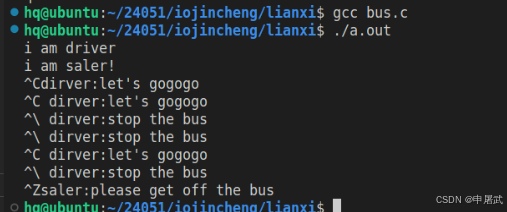
用信号的知识实现司机和售票员问题。
1)售票员捕捉SIGINT(代表开车)信号,向司机发送SIGUSR1信号,司机打印(let's gogogo)
2)售票员捕捉SIGQUIT(代表停车)信号,向司机发送SIGUSR2信号,司机打印(stop the bus)
3)司机捕捉SIGTSTP(代表到达终点站)信号,向售票员发送SIGUSR1信号,售票员打印(please get off the bus)
4)司机等待售票员下车,之后司机再下车。
分析:司机(父进程)、售票员(子进程)
售票员:捕捉:SIGINT、SIGQUIT、SIGUSR1
忽略: SIGTSTP
司机: 捕捉:SIGUSR1、SIGUSR2、SIGTSTP
忽略: SIGINT、SIGQUIT
#include <sys/wait.h>
#include <sys/types.h>
#include <signal.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
/*
售票员捕捉SIGINT(开车)、SIGQUIT(停车)信号并向司机发送信号,捕捉司机发送的下车信号
司机捕捉售票员发出的开车和停车信号,SIGTSTP(到站信号).向售票员发送下车的信号
*/
pid_t pid;
void saler(int sig)
{
// 捕捉开车信号,并向司机发送gogogo信号
if (sig == SIGINT)
{
kill(getppid(), SIGUSR1);
}
// 捕捉停车信号,并向司机发送stop信号
if (sig == SIGQUIT)
{
kill(getppid(), SIGUSR2);
}
// 捕捉司机发送的下车信号
if (sig == SIGUSR1)
{
printf("saler:please get off the bus \n");
exit(0);
}
}
void dirver(int sig)
{
// 捕捉售票员发出的开车信号
if (sig == SIGUSR1)
{
printf("dirver:let's gogogo\n ");
}
// 捕捉售票员发出的停车信号
if (sig == SIGUSR2)
{
printf("dirver:stop the bus \n ");
}
// 捕捉到站信号并向售票员发出下车信号
if (sig == SIGTSTP)
{
kill(pid, SIGUSR1);
// 等待售票员下车
wait(NULL);
exit(0);
}
}
int main(int argc, char const *argv[])
{
pid = fork();
if (pid < 0)
{
perror("fork error");
return -1;
}
else if (pid == 0) // 子进程 售票员
{
printf("i am saler!\n");
signal(SIGINT, saler);
signal(SIGQUIT, saler);
signal(SIGUSR1, saler);
signal(SIGTSTP, SIG_IGN);
}
else // 父进程 司机
{
printf("i am driver\n");
signal(SIGTSTP, dirver);
signal(SIGUSR1, dirver);
signal(SIGUSR2, dirver);
signal(SIGINT, SIG_IGN);
signal(SIGQUIT, SIG_IGN);
}
while (1)
{
pause();
}
return 0;
}

















 1306
1306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









