






一、两个消息类型
通过tf2库来实现不同坐标系之间的变换,需要用到两个重要的消息类型。
geometry_msgs::TransformStampedgeometry_msgs::PointStamped
geometry_msgs::TransformStamped 是 ROS中的一个消息类型,定义在 geometry_msgs 包内,主要用于存储变换信息。它通常用于 tf2 库,用来表示坐标系之间的变换关系,包括平移、旋转以及时间戳。
geometry_msgs::PointStamped 是 ROS中的一个消息类型,定义在 geometry_msgs 包内,主要用于表示带有时间戳和坐标系信息的 3D 点。它通常用于存储某个坐标系下的点的位置,并在 tf2 变换中转换到其他坐标系。
下面展示一下两个消息类型的结构定义。
# geometry_msgs::TransformStamped
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
float64 z
float64 w
# geometry_msgs::PointStamped
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Point point
float64 x
float64 y
float64 z
二、问题例子描述
参考资料:AutoLabor ROS学习
现有一机器人模型,核心构成包含主体与雷达,各对应一坐标系,坐标系的原点分别位于主体与雷达的物理中心,已知雷达原点相对于主体原点位移关系如下: x 0.2 y0.0 z0.5。当前雷达检测到一障碍物,在雷达坐标系中障碍物的坐标为 (2.0 3.0 5.0),请问该障碍物相对于主体的坐标是多少?
三、C++编码实现
// tf_pub.cpp
#include "ros/ros.h"
#include "tf2_ros/static_transform_broadcaster.h"
#include "tf2/LinearMath/Quaternion.h"
#include "geometry_msgs/TransformStamped.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc, argv, "tf_pub");
tf2_ros::StaticTransformBroadcaster broadcaster;
geometry_msgs::TransformStamped ts;
// 定义消息类型信息
ts.header.stamp = ros::Time::now();
ts.header.frame_id = "base_link";
ts.child_frame_id = "laser";
ts.transform.translation.x = 0.2;
ts.transform.translation.y = 0.0;
ts.transform.translation.z = 0.5;
// 定义四元数并赋值
tf2::Quaternion qtn;
qtn.setRPY(0, 0, 0);
// 从四元数中获取欧拉角并赋值
ts.transform.rotation.x = qtn.getX();
ts.transform.rotation.y = qtn.getY();
ts.transform.rotation.z = qtn.getZ();
ts.transform.rotation.w = qtn.getW();
// 广播器发布坐标变换信息
broadcaster.sendTransform(ts);
ros::spin();
return 0;
}
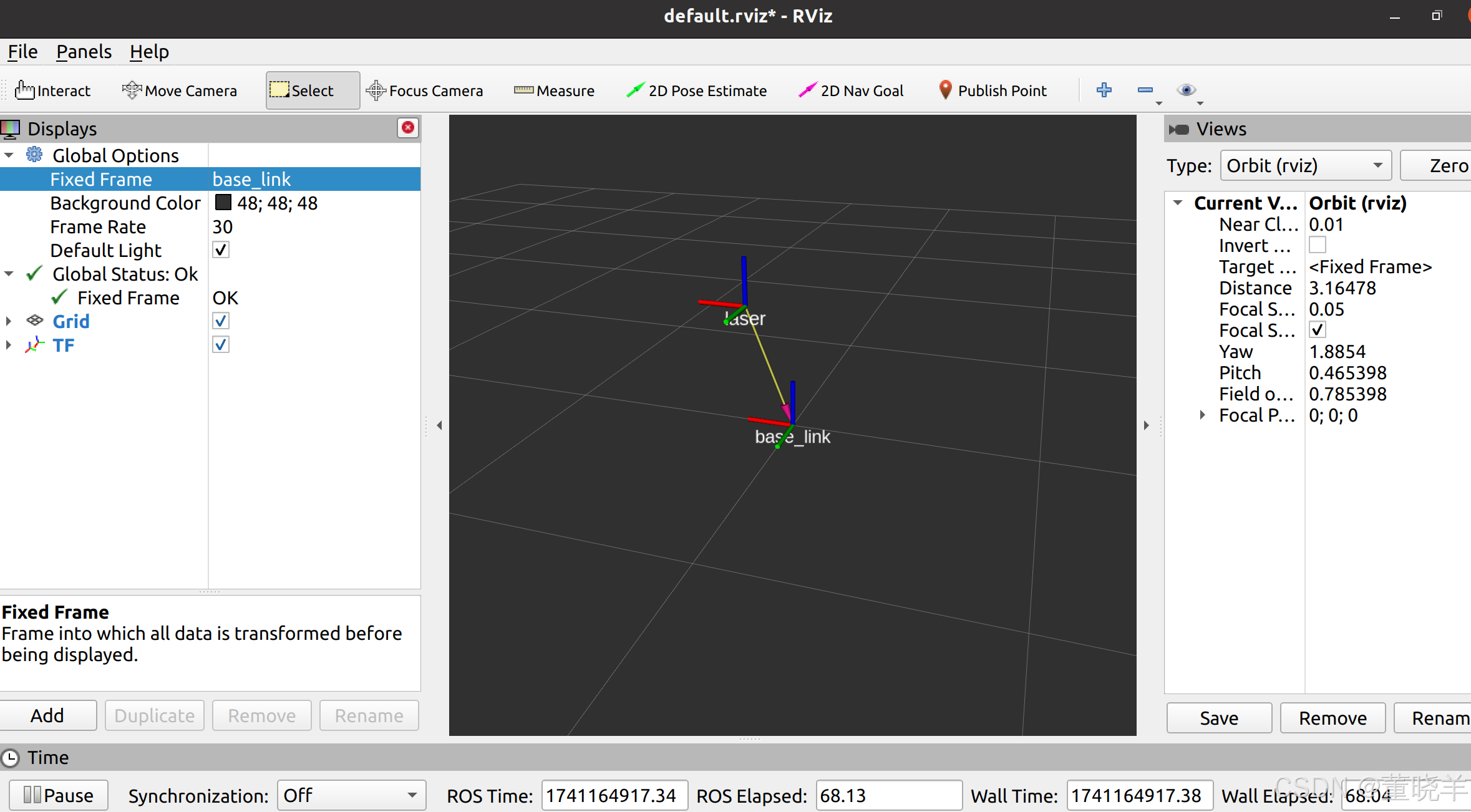
在广播器广播了坐标变换信息后,我们可以在rViz中查看到两个坐标点之间的变换情况。可以理解为让ROS服务器知道了有这两个坐标系的存在,并且告诉了它两个坐标系之间变换的关系。
// tf_sub.cpp
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h"
#include "tf2_ros/buffer.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc, argv, "tf_sub");
ros::NodeHandle nh;
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
ros::Rate rate(1);
while(ros::ok())
{
// 生成一个相对于激光坐标系的坐标点
geometry_msgs::PointStamped ps_laser;
ps_laser.header.frame_id = "laser";
ps_laser.header.stamp = ros::Time::now();
ps_laser.point.x = 2.0;
ps_laser.point.y = 3.0;
ps_laser.point.z = 5.0;
ROS_INFO("转换前的数据:(%.2f,%.2f,%.2f),参考的坐标系是:%s",
ps_laser.point.x,
ps_laser.point.y,
ps_laser.point.z,
ps_laser.header.frame_id.c_str());
try
{
geometry_msgs::PointStamped ps_base;
ps_base = buffer.transform(ps_laser, "base_link");
ROS_INFO("转换后的数据:(%.2f,%.2f,%.2f),参考的坐标系是:%s",
ps_base.point.x,
ps_base.point.y,
ps_base.point.z,
ps_base.header.frame_id.c_str());
}
catch(const std::exception& e)
{
ROS_INFO("ERROR: %s", e.what());
}
rate.sleep();
ros::spinOnce();
}
}
运行结果如下。

















 1907
1907

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









