







1、三相PMSM数学建模
前面我们介绍了CLARK变换和PRAK变换,从繁琐强耦合的自然坐标系下解 放出来,接下来我们将在同步旋转坐标系和静止坐标系下建立三相PMSM数学 模型和对应的仿真序列。从繁到简,先介绍同步选择坐标系下的三相PMSM数 学模型,在回过头看静止坐标系。
2、同步旋转坐标系
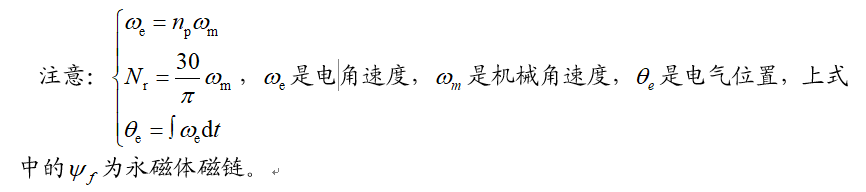
通过坐标变换,我们将复杂的三相PMSM模型简化为类似于直流电机的D/Q 模型,大大降低了后期控制器的设计难度,在d-q模型下,三相PMSM的定子 电压方程为:
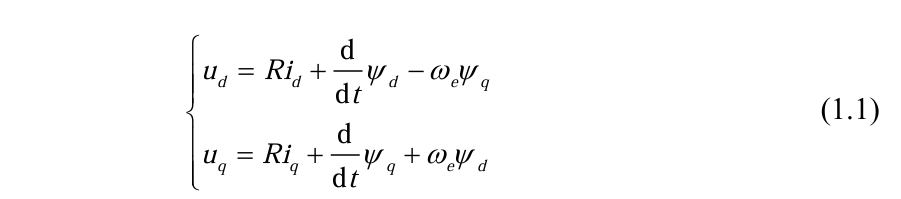
相应的定子磁链方程为:

综合上面两个式子,得到:

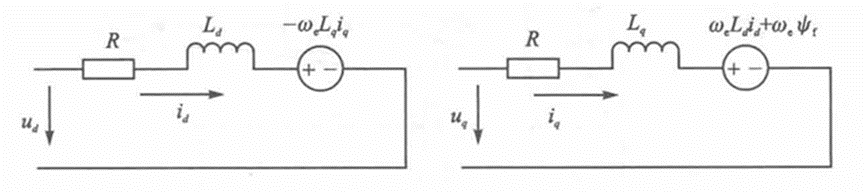
从式(1.3)可以看出,三相PMSM数学模型已经实现完全解耦,得出下图三相PMSM的电压等效电路:
得到此时的电磁转矩方程:

至此,我们就完成了内置式三相PMSM的数学模型,对于表贴式三相PMSM,由于气隙均匀对称,有,相对简单。
2.1、MATLAB仿真
下面就利用MATLAB中的SIMULINK根据搭建仿真。话不多说,先看图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2579
2579

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









