






 本文介绍了ROS(Robot Operating System)中的几个核心工具,包括rqt_graph用于展示系统计算图,rosnode显示节点信息,rostopiclist列出所有主题,rosmsgshow查看消息结构,rosservicelist列举服务,以及rosbag用于话题记录和复现。这些工具对于理解和调试ROS系统至关重要。
本文介绍了ROS(Robot Operating System)中的几个核心工具,包括rqt_graph用于展示系统计算图,rosnode显示节点信息,rostopiclist列出所有主题,rosmsgshow查看消息结构,rosservicelist列举服务,以及rosbag用于话题记录和复现。这些工具对于理解和调试ROS系统至关重要。
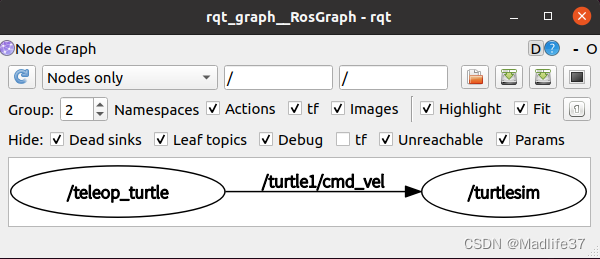
以小海龟为例:
rqt_graph 显示系统计算图的工具
rosnode 显示系统中所有节点相关信息的指令
rosnode list 列出所有节点
 (rosout 为系统默认topic)
(rosout 为系统默认topic)
rosnode info 查看某个节点的具体信息
rostopic list 当前系统所有topic列表
rostopic pub 发布数据给某个topic
rosmsg show **** 查看message数据结构
rosservice list 所有service服务内容
rosservice call 发布服务请求
话题记录 rosbag record -a -O cmd_record (-a表示-all,即保存所有数据;-O表示保存成压缩包;cmd_record为文件名)
话题复现 rosbag play cmd_record.bag


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









