







本文导读
上节课程给大家介绍了ZMC432CL-V2硬件接口(详情点击→步进的光栅尺全闭环EtherCAT运动控制器ZMC432CL-V2(一):硬件接口介绍),本节主要讲解如何通过RTSys开发软件调试ZMC432CL-V2的脉冲闭环功能。
一、ZMC432CL-V2产品简介
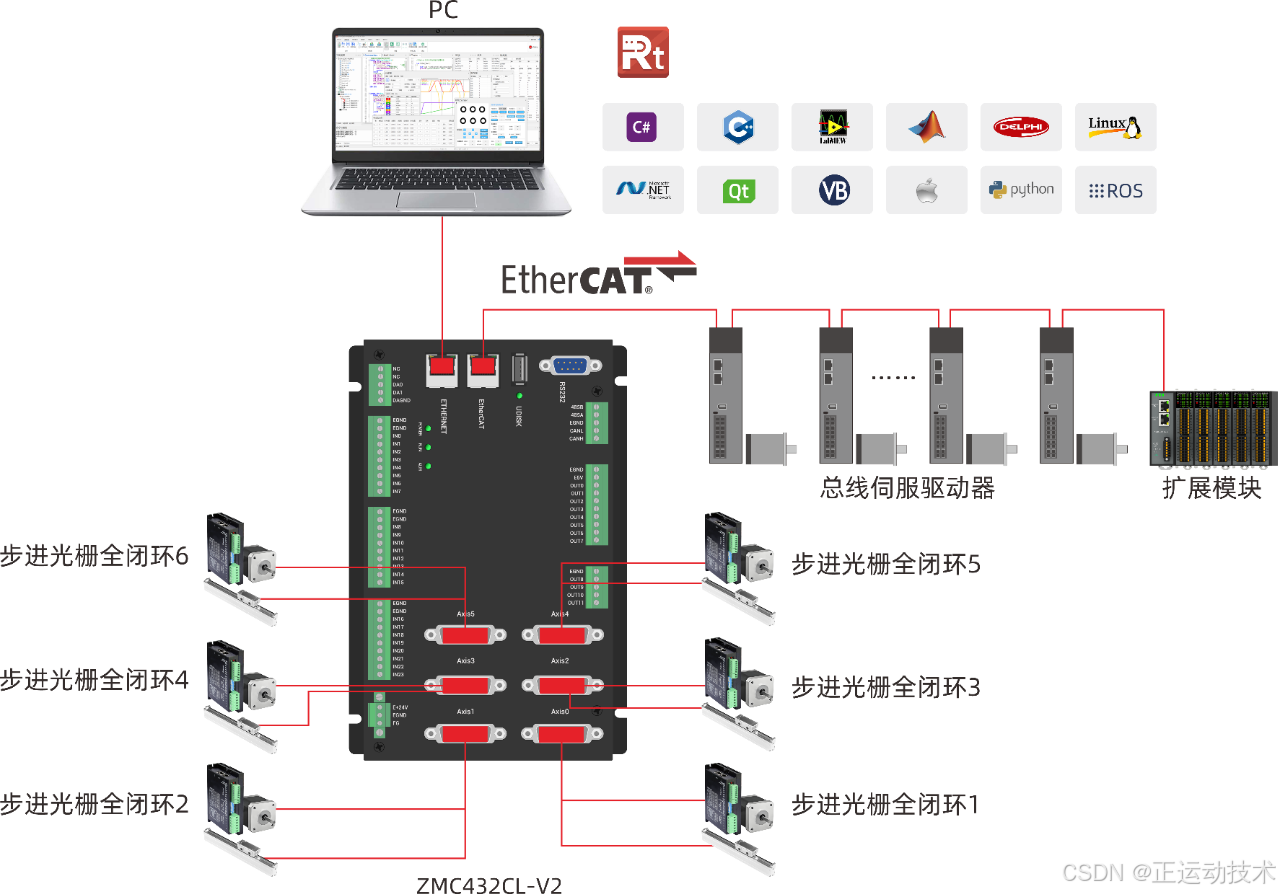
ZMC432CL-V2高性能多轴运动控制器是一款兼容EtherCAT总线和脉冲型的独立式运动控制器,具备高速实时反馈功能,支持脉冲全闭环控制,能够实现高精度、高响应速度的运动控制。高精度定位,有效消除机械传动误差,满足高精密加工场景应用要求。
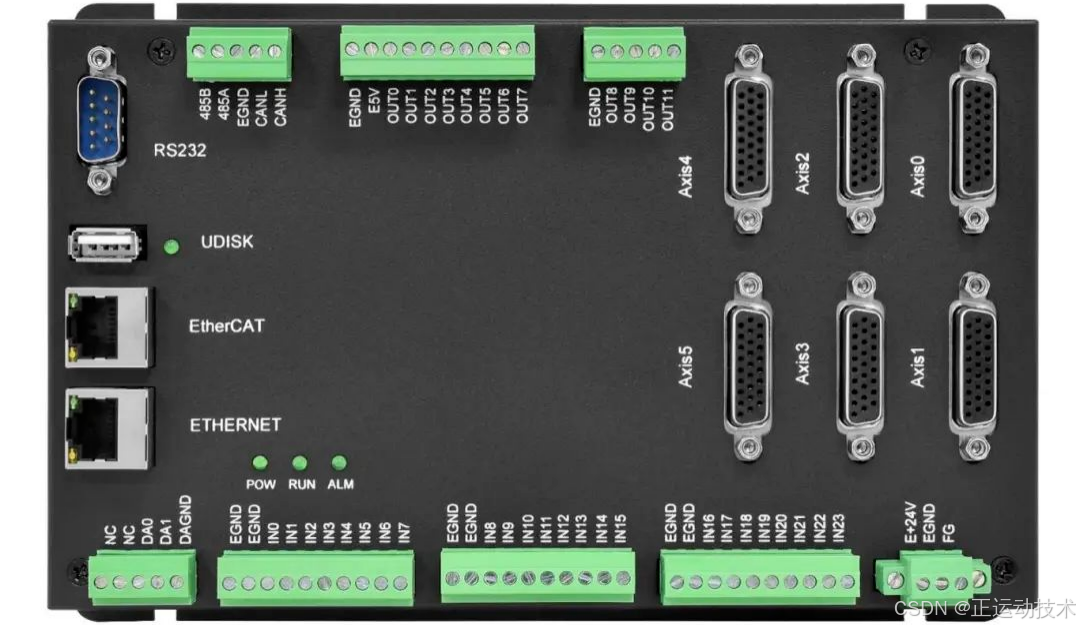
1.ZMC432CL-V2硬件功能
- (1)丰富的运动控制功能:支持直线、圆弧、空间圆弧、螺旋插补等。
- (2)硬件接口丰富:支持脉冲轴(带编码器反馈)和EtherCAT总线轴,具备24路输入和12路输出的通用IO,部分为高速IO,2路模拟量输出(DA)。
- (3)EtherCAT刷新周期最快达250us,满足高速通信需求。
- (4)支持4通道硬件比较输出、硬件定时器、运动中精准输出,适用于多通道视觉飞拍等场合。
- (5)支持掉电检测、掉电存储,多种程序加密方式,能够有效防止系统故障,保护项目工程文件数据,并提高系统的可靠性。
- (6)通过纯国产IDE开发环境RTSys进行项目开发,可实时仿真、在线跟踪以及诊断与调试,简便易用,支持多种高级上位机语言联合编程进行二次开发。
ZMC432CL-V2视频介绍请点击→步进控制的光栅尺全闭环解决方案:32轴EtherCAT总线运动控制器ZMC432CL-V2。
更多关于ZMC432CL-V2详情介绍点击→步进控制的光栅尺全闭环解决方案:32轴EtherCAT总线运动控制器ZMC432CL-V2。
二、RTSys调试ZMC432CL-V2的脉冲闭环功能
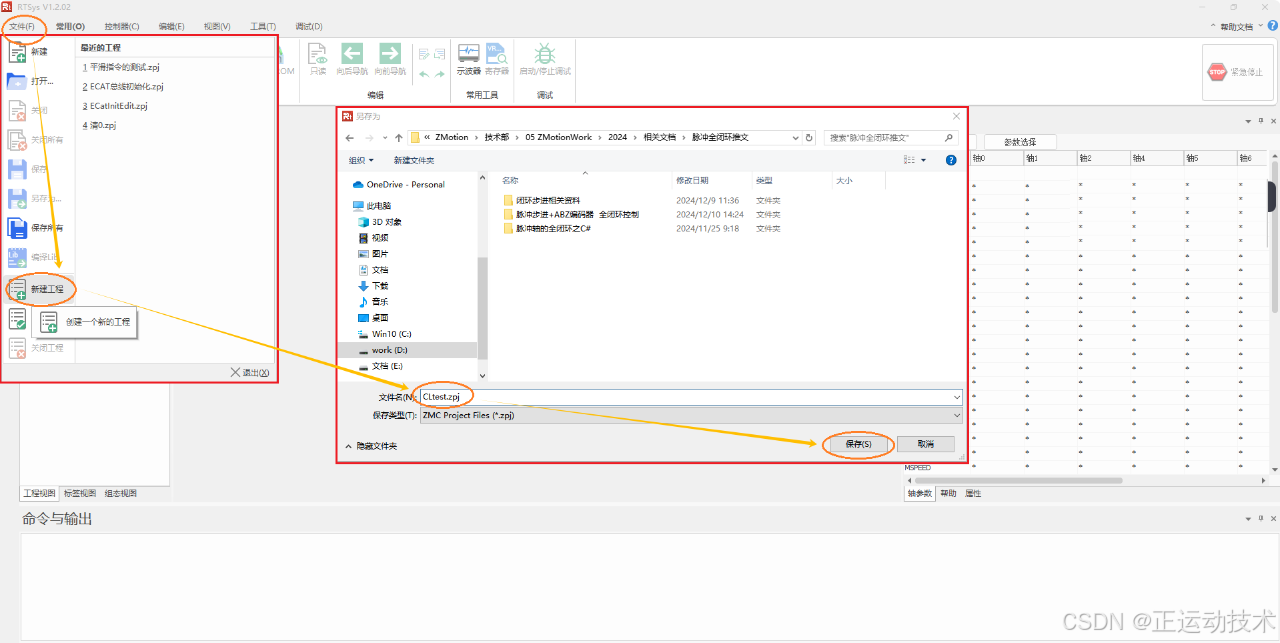
1.新建RTSys的项目文件
点击【文件】→【新建工程】→【输入文件名】→【保存】。
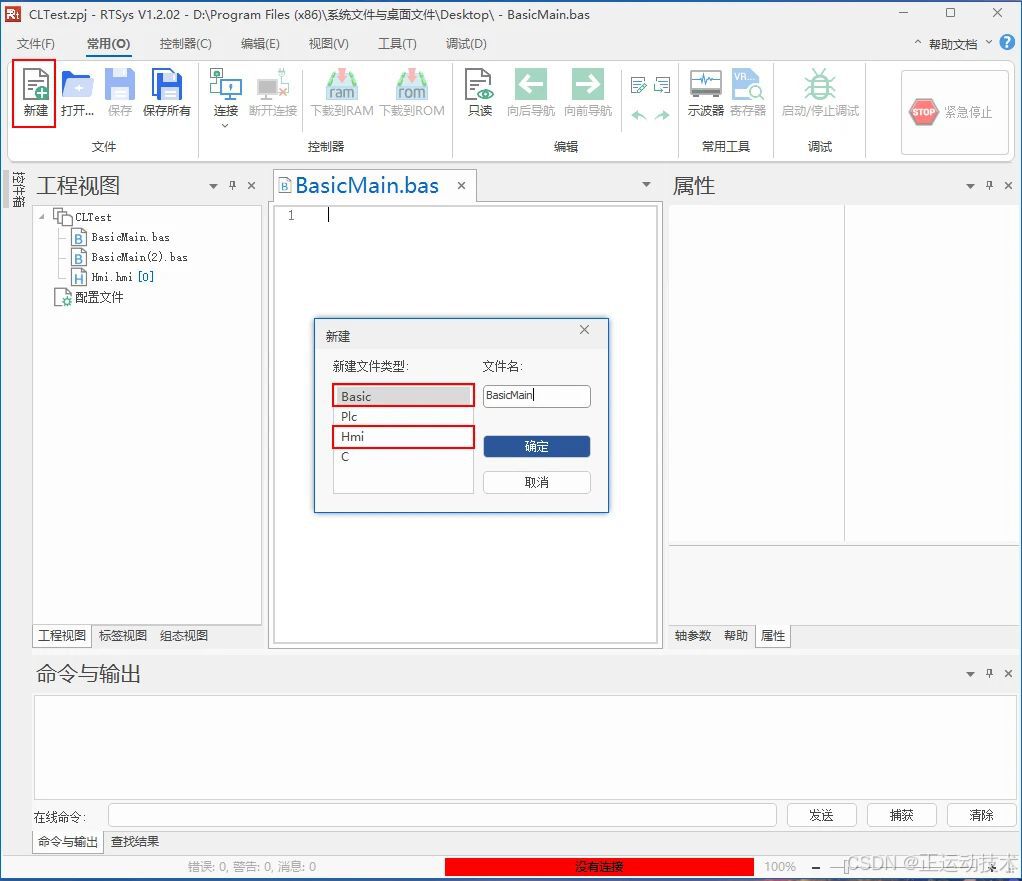
2.新建RTBasic文件和RTHmi文件
点击【新建】→【选择Basic/Hmi】→【确定】,完成Basic和Hmi文件的创建,其中Basic文件用于运动逻辑的编写,Hmi文件用于人机交互界面的设计。
右击【工程视图】下的HMI文件名称,在弹出的选项框中选择【设置任务号】,并将其设置为0,表示控制器启动后将一任务0去执行Hmi文件程序。
3.在BasicMain.bas文件里面编写系统初始化函数和周期扫描函数
'/****************************************************************************
'任务编号:无
'函数功能:系统初始化
'Input:无
'Output:无
'返回值:无
'备注:无
'******************************************************************************/
GLOBAL SUB SysInit()
'测试固件信息
?"测试固件信息:ver 24.8.28 : "version_build, "SERVO_PERIOD: "SERVO_PERIOD
'轴分配
GLOBAL CONST TestAxisId=0
'线程分配
GLOBAL CONST IntCycleTask=1
GLOBAL CONST OtherTask=2
'其他变量
GLOBAL gvCLStstus,gv_HandMode
GLOBAL gv_P,gv_I,gv_D
GLOBAL gv_VF,gv_AF,gv_OV
'轴初始化参数
GLOBAL gv_Speed,gv_Accel,gv_Decel
GLOBAL gv_Sramp,gv_Inch
GLOBAL gv_Units
GLOBAL gv_mpos,gv_input
GLOBAL VpMode
'*********************轴参数初始化 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 996
996

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











