







开发板有两个定时器:定时器A和定时器B。因为定时器B和定时器A差不多,所以就介绍一下定时器A。
定时器A一共有三个,定时器B有一个。其中定时器A分为Timer0_A,Timer1_A,Timer2_A。定时器A支持多重捕获/比较,PWM输出和定时功能,具备中断函数,可以通过定时器溢出或者捕获/比较触发。
这里介绍定时器A的定时器功能和输出PWM功能。其他没涉及的不做介绍。
下面介绍定时器A0相关的寄存器:
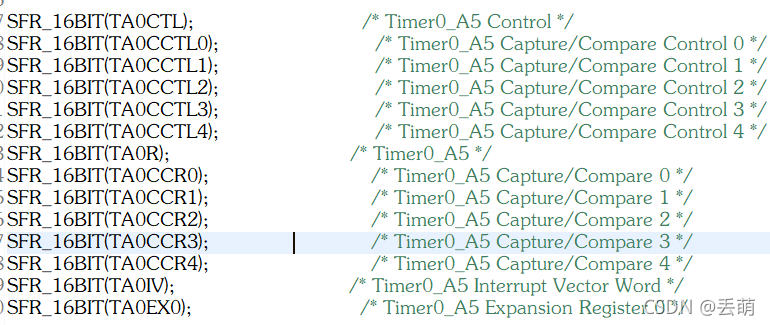
1.TA0CTL 寄存器是定时器A的总控制寄存器,可以通过写入宏定义好的单词来配置相关位
2.TA0CCTL0 寄存器是定时器A下第一个捕获/比较器的控制寄存器,也可以通过写入相关单词来配置对应的功能。
3.TA0CCR0 寄存器可以通过写入相关的值来决定多少个时间计时一次。
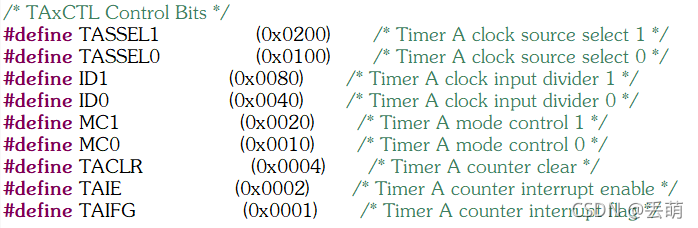
TA0CTL寄存器对应下的配置单词,通过写入这些宏定义好的单词可以完成对应位的功能配置。
a.TASSELn 位可以选择定时器的时钟源(我一般选择SMCLK,和主时钟一个频率)


b. IDn 位则是可以对主时钟进行分频操作,比如二分频的话,16Mhz的主时钟就变成8Mhz了,最高是八分频。

c. MCn 位可以配置寄存器对应的功能,按顺序分别为停止计数,增计数,持续计数,增减计数。PWM模式和定时器模式用增计数模式就可以了。

d.TACLR 位可以清空计数值,刚开始配置的时候应该写上让定时器变成初始态。
e.TAIE 位可以开启定时器中断功能。
f.TAIFG 位当定时器中断触发的时候会自动置一。
TA0CCTLn寄存器相关功能位介绍
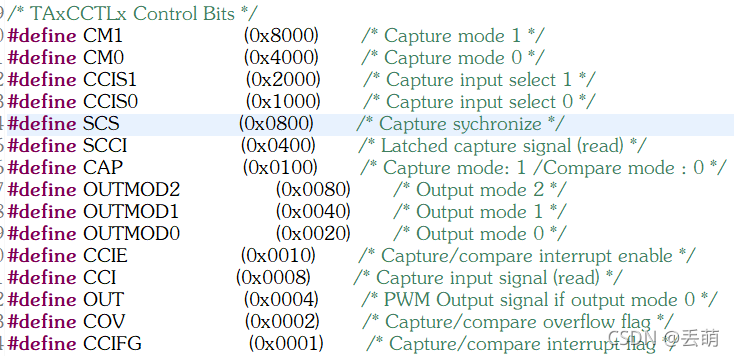
a. 用作定时器功能的时候只需要置位CCIE即可,即打开比较器中断使能。
b. PWM则通过置位OUTMOD_7即可,设置为复位/置位模式。
其他用作比较器/捕获器的功能位先不做介绍。
Timer0_A5,5的意思是有5个捕获/比较器。下面会给出两个配置例程,PWM例程可以通过示波器来观察对应引脚输出的情况。
例程1.定时器功能
对应TA0CCR0的值配置公式:
TA0CCR0=16M(时钟频率) / ( 2(默认二分频)*200(5ms对应频率) )
如果有配置对应分频,需要除去对应的分频值
#include <msp430.h>
void initClockTo16MHz()
{
UCSCTL3 |= SELREF_2; // Set DCO FLL reference = REFO
UCSCTL4 |= SELA_2; // Set ACLK = REFO
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
UCSCTL1 = DCORSEL_5; // Select DCO range 16MHz operation
UCSCTL2 = FLLD_0 + 487; // Set DCO Multiplier for 16MHz
// (N + 1) * FLLRef = Fdco
// (487 + 1) * 32768 = 16MHz
// Set FLL Div = fDCOCLK
__bic_SR_register(SCG0); // Enable the FLL control loop
// Worst-case settling time for the DCO when the DCO range bits have been
// changed is n x 32 x 32 x f_MCLK / f_FLL_reference. See UCS chapter in 5xx
// UG for optimization.
// 32 x 32 x 16 MHz / 32,768 Hz = 500000 = MCLK cycles for DCO to settle
__delay_cycles(500000);//
// Loop until XT1,XT2 & DCO fault flag is cleared
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
}
void time0Init(void)
{
TA0CTL |= MC_1 + TASSEL_2 + TACLR; //时钟为SMCLK,增计数模式,开始时清零计数器
TA0CCTL0 = CCIE; //比较器中断使能
TA0CCR0 = 40000; //中断(周期)5ms
}
void GPIO_init(void){
P4DIR |= BIT7;
}
void main(void){
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
initClockTo16MHz(); //配置系统时钟为16Mhz
GPIO_init();
time0Init();
_EINT();
while(1){
}
}
/************************定时器中断函数********************************/
#if 1
#pragma vector = TIMER0_A0_VECTOR
__interrupt void Timer_A(void)
{
P4OUT ^= BIT7;
}
#endif例程2.PWM模式
实际输出频率以示波器显示为主。
具体哪些引脚能用于输出PWM波请看自带的引脚功能图。
#include <msp430.h>
void initClockTo16MHz()
{
UCSCTL3 |= SELREF_2; // Set DCO FLL reference = REFO
UCSCTL4 |= SELA_2; // Set ACLK = REFO
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
UCSCTL1 = DCORSEL_5; // Select DCO range 16MHz operation
UCSCTL2 = FLLD_0 + 487; // Set DCO Multiplier for 16MHz
// (N + 1) * FLLRef = Fdco
// (487 + 1) * 32768 = 16MHz
// Set FLL Div = fDCOCLK
__bic_SR_register(SCG0); // Enable the FLL control loop
// Worst-case settling time for the DCO when the DCO range bits have been
// changed is n x 32 x 32 x f_MCLK / f_FLL_reference. See UCS chapter in 5xx
// UG for optimization.
// 32 x 32 x 16 MHz / 32,768 Hz = 500000 = MCLK cycles for DCO to settle
__delay_cycles(500000);//
// Loop until XT1,XT2 & DCO fault flag is cleared
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
}
void PWMInit(void)
{
#if 1
P2DIR |= BIT0;
P2SEL |= BIT0;
TA1CCTL1 |= OUTMOD_7; //复位置位模式
TA1CTL |= TASSEL_2 + MC_1 + ID_3; //设置时钟源为SMCLK 16Mhz 8分频
TA1CCR0 = 400; // 400:16Mhz/8/400≈5000hz
TA1CCR1 = 200; //占空比 50% 时取值200
#endif
}
void GPIO_init(void){
P4DIR |= BIT7;
}
void main(void){
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
initClockTo16MHz(); //配置系统时钟为16Mhz
GPIO_init();
PWMInit();
_EINT();
while(1){
P4OUT |= BIT7; //亮灯
}
}
















 863
863

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









