







1.介绍:
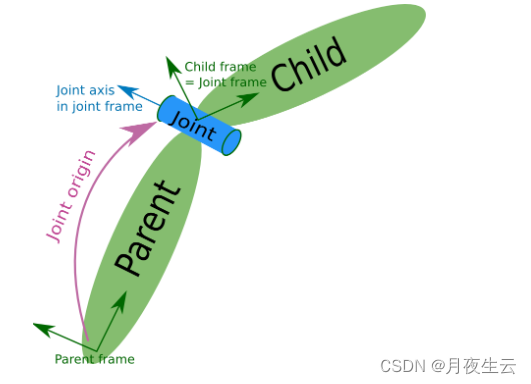
urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式: 旋转、滑动、固定、旋转速度、旋转角度限制....,比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。joint标签对应的数据在模型中是不可见的。
2.属性:
-
name ---> 为关节命名
-
type ---> 关节运动形式
-
continuous: 旋转关节,可以绕单轴无限旋转
-
revolute: 旋转关节,类似于 continues,但是有旋转角度限制
-
prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
-
planer: 平面关节,允许在平面正交方向上平移或旋转
-
floating: 浮动关节,允许进行平移、旋转运动
-
fixed: 固定关节,不允许运动的特殊关节
-
3.子标签:
-
parent(必需的)
parent link的名字是一个强制的属性:
- link:父级连杆的名字,是这个link在机器人结构树中的名字。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1867
1867

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









