pybullet 抓取模型的获得和处理(七)
最新推荐文章于 2024-12-29 10:06:31 发布





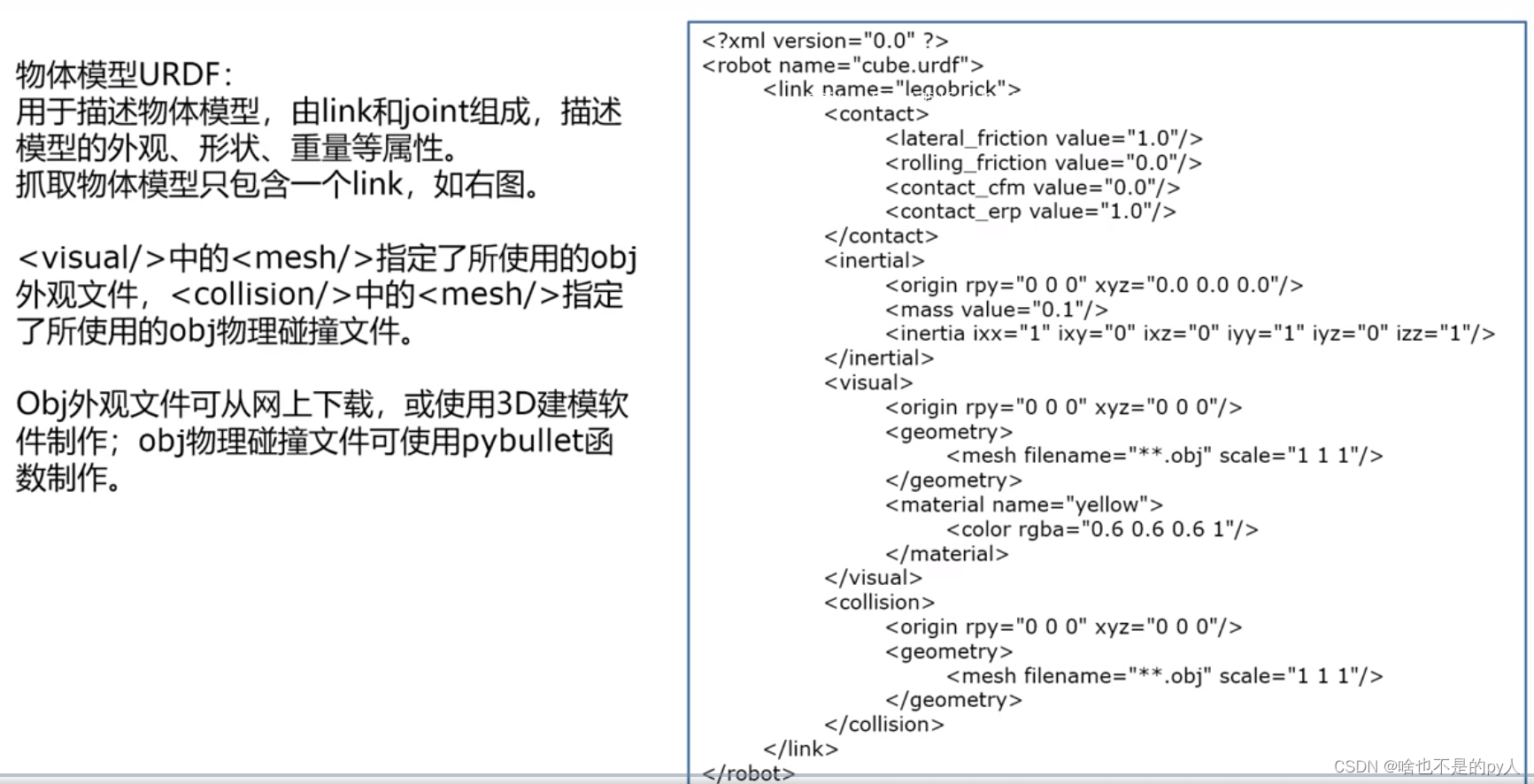
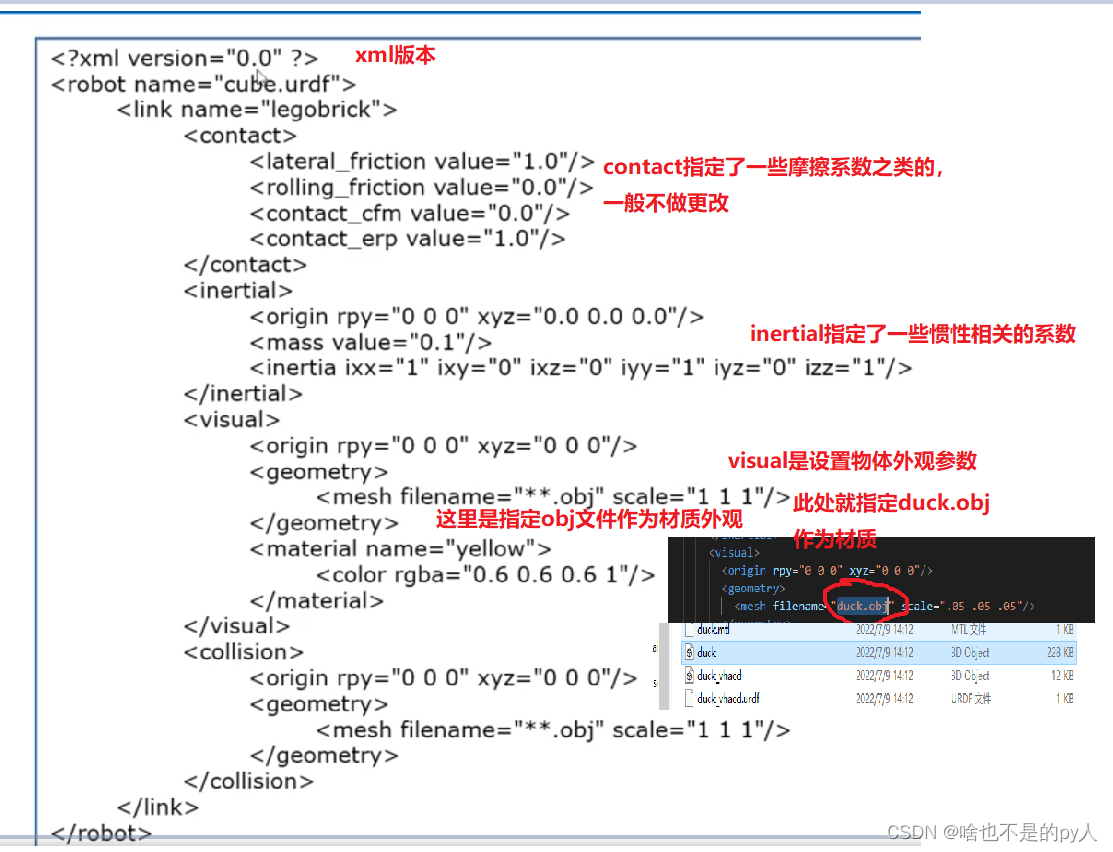
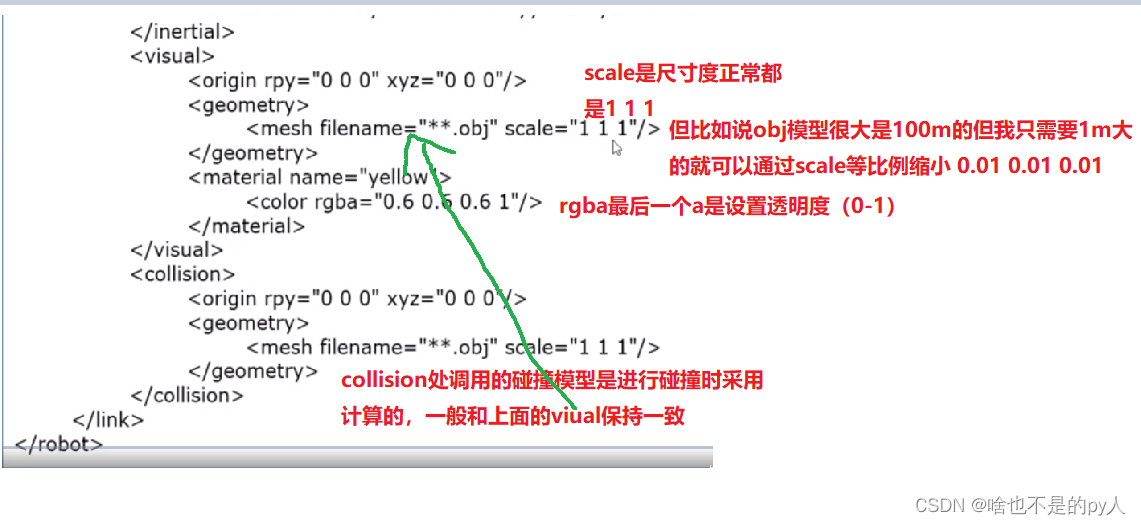
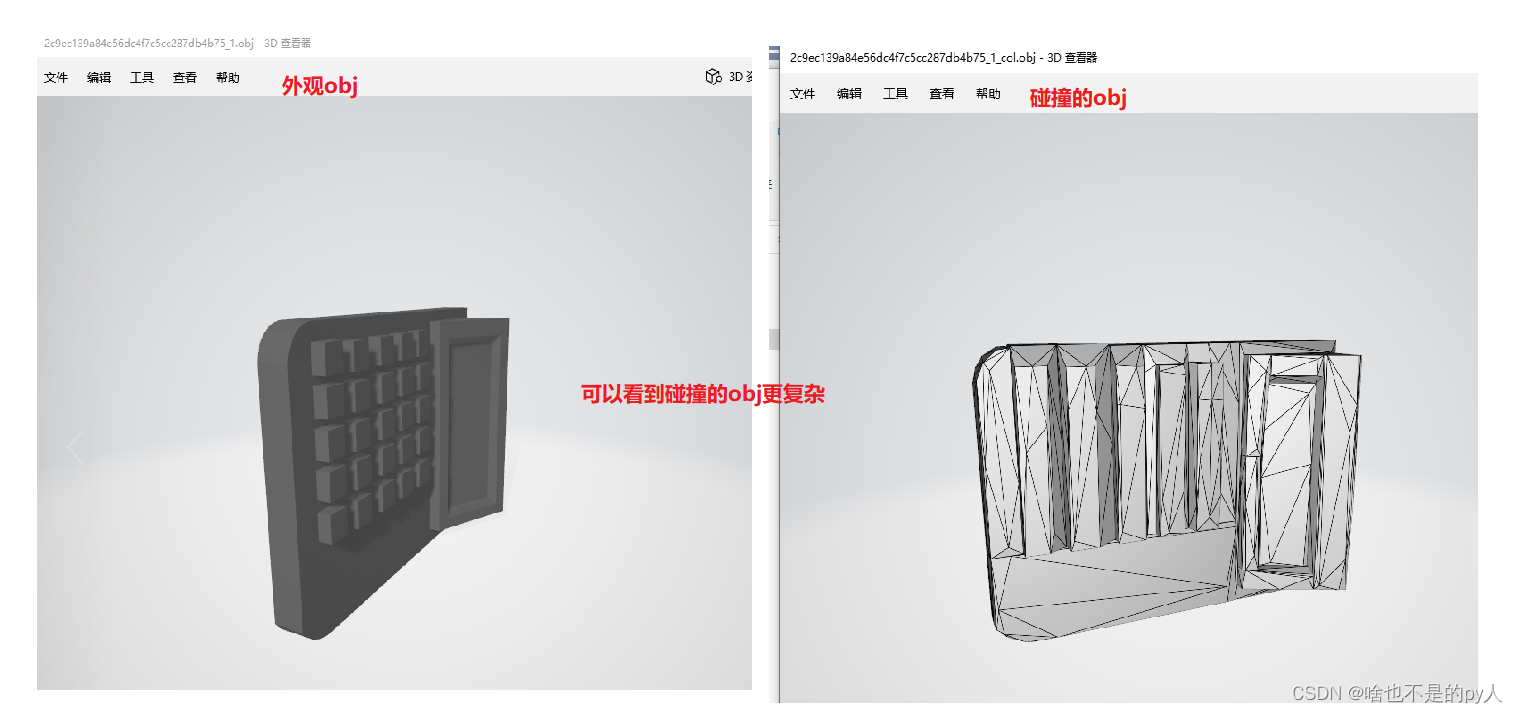
 本文介绍了如何在PyBullet环境中获取和处理模型,包括理解URDF基本概念,模型的下载、制作,以及利用Blender查看和调整模型尺寸。重点讲述了从OBJ文件生成URDF文件及碰撞模型的过程,并详细说明了如何生成包含模型列表的TXT文件,以便于后续抓取实验的加载。
本文介绍了如何在PyBullet环境中获取和处理模型,包括理解URDF基本概念,模型的下载、制作,以及利用Blender查看和调整模型尺寸。重点讲述了从OBJ文件生成URDF文件及碰撞模型的过程,并详细说明了如何生成包含模型列表的TXT文件,以便于后续抓取实验的加载。
本文介绍了如何在PyBullet环境中获取和处理模型,包括理解URDF基本概念,模型的下载、制作,以及利用Blender查看和调整模型尺寸。重点讲述了从OBJ文件生成URDF文件及碰撞模型的过程,并详细说明了如何生成包含模型列表的TXT文件,以便于后续抓取实验的加载。
本文介绍了如何在PyBullet环境中获取和处理模型,包括理解URDF基本概念,模型的下载、制作,以及利用Blender查看和调整模型尺寸。重点讲述了从OBJ文件生成URDF文件及碰撞模型的过程,并详细说明了如何生成包含模型列表的TXT文件,以便于后续抓取实验的加载。
 2821
2230
2960
2821
2230
2960

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 模型
模型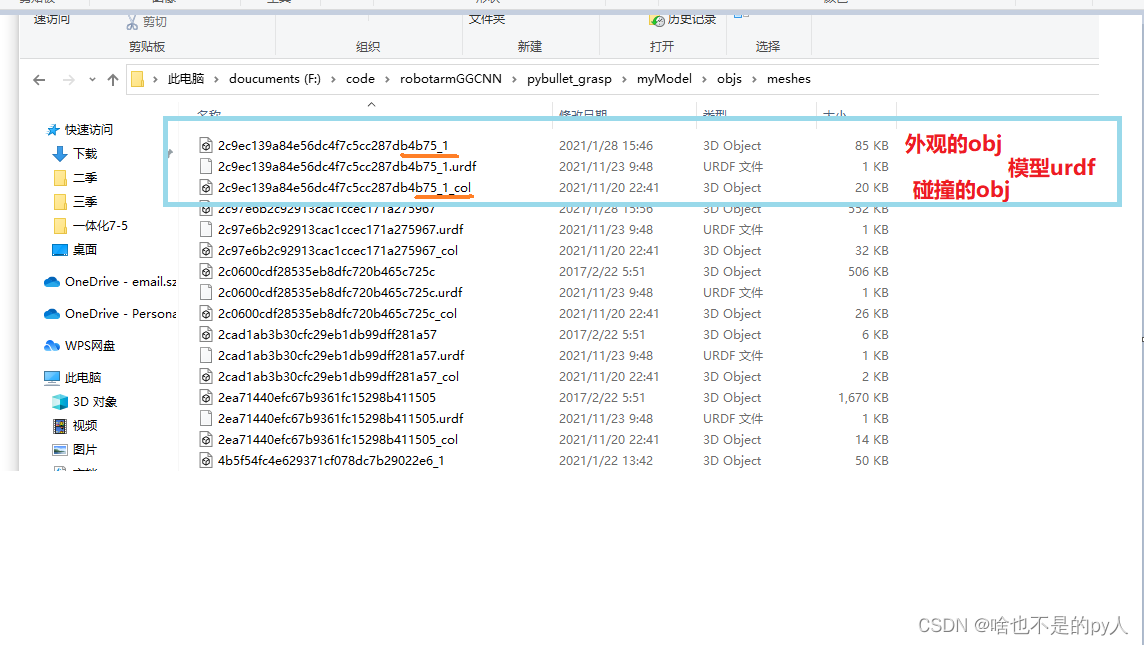
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























