







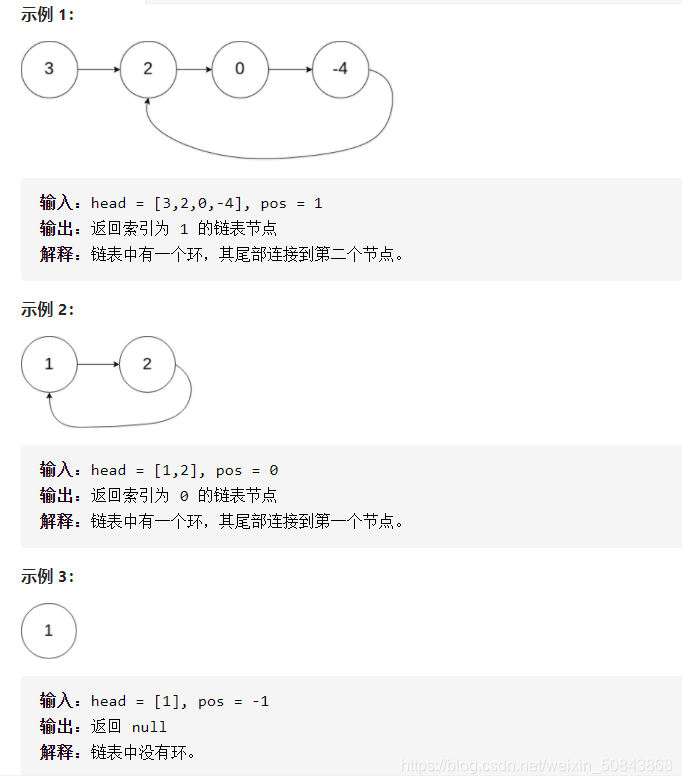
给定一个链表,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
为了表示给定链表中的环,我们使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。 如果 pos 是 -1,则在该链表中没有环。注意,pos 仅仅是用于标识环的情况,并不会作为参数传递到函数中。 说明:不允许修改给定的链表。
解题思路:
1.使用快慢指针判断有无环:让慢指针每次走一步,快指针每次走俩步。
不理解为什么快慢指针可以来判断有无环的可以看上一篇博客:
环形链表1
slow = slow->next;
fast = fast->next->next;
2.当有环时:fast与slow会相遇,再让头结点head与相遇结点fast一起每次走一步,
head与fast相遇时,就是环的第一个结点。
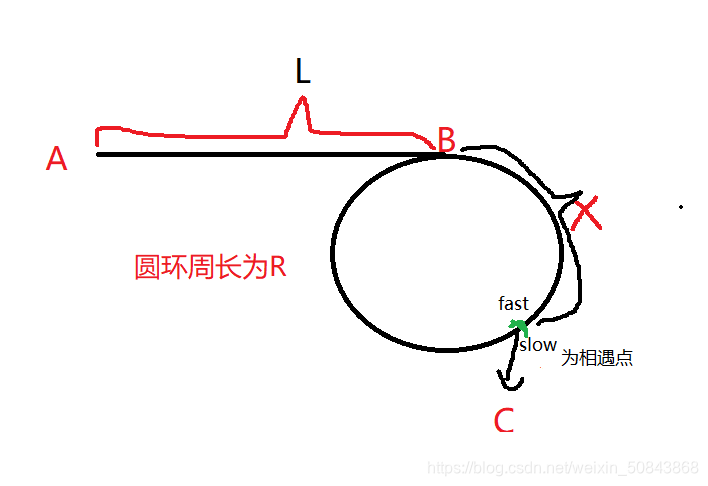
如下图所示:
A为链表头结点的位置,B为入环结点的位置,C为快慢指针相遇位置。
设AB=L,BC=X,圆环周长为R。
CB=R-C
当快慢指针相遇时:慢指针slow的路程为L+X
快指针为L+X+nR
根据快指针走的路程时慢指针走的二倍:
2(L+X) = L+X+nR
化解得:L = n*R-X
L = (n-1)R + (R-X)
代码实现:
/**
* Definition for singly-linked list.
* struct ListNode {
* int val;
* struct ListNode *next;
* };
*/
struct ListNode *detectCycle(struct ListNode *head) {
//创建快慢指针slow,fast
struct ListNode* slow = head,*fast = head;
//判断是否有环
while(fast && fast->next)
{
slow = slow->next;//慢指针每次走一步
fast = fast->next->next;//快指针每次走俩步
if(fast == slow)
{
break;//相遇跳出
}
}
if(fast == NULL || fast->next == NULL)//判断无环的情况
{
return NULL;
}
//有环
while(head != fast)//fast从与slow相遇的结点走,head从头开始走,head与fast相遇点就是环的头结点
{
head = head->next;
fast = fast->next;
}
return head;
}

















 1330
1330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









