










开坑,刚看完书,已经有些窒息了
先把坑挖了,再慢慢填,避免自己划水跳过
我爱线代,线代爱我,阿弥陀佛
为什么要学奇异值分解?
因为书本倒数第二章专门提到的,想必一定很重要,于是我上网查了一下奇异值分解的应用
wow 。。。很有用,增加了学习的动力
在机器学习中,奇异值分解,可以删除一些没什么作用的特征。
具体是如何删除的呢?需要先了解一下,奇异值分解的数学原理
不会吧。。。我难道要用markdown语法来写矩阵的推导过程吗。。。
太痛苦了吧
首先,奇异值是什么?分解又从何谈起?
- 奇异值分解的本质,其实是矩阵分解的延伸
什么是矩阵分解?矩阵分解又有什么意义呢?
- 矩阵分解,是将一个矩阵分解为多个形式简单的矩阵,可以更好地理解矩阵本身的作用
-
感觉像一句废话,举个栗子吧…oh不,举个up主:矩阵分解及正交矩阵
- 其实就是用矩阵的伸缩、旋转变换功能来举例
向量和矩阵
向量一般是竖着写的,几个向量组成一个矩阵
例如向量 X =
[
x
1
x
2
x
3
]
\begin{bmatrix} x_1\\ x_2\\ x_3\\ \end{bmatrix}
x1x2x3
,Y =
[
y
1
y
2
y
3
]
\begin{bmatrix} y_1\\ y_2\\ y_3\\ \end{bmatrix}
y1y2y3
,Z =
[
z
1
z
2
z
3
]
\begin{bmatrix} z_1\\ z_2\\ z_3\\ \end{bmatrix}
z1z2z3
,K =
[
k
1
k
2
k
3
]
\begin{bmatrix} k_1\\ k_2\\ k_3\\ \end{bmatrix}
k1k2k3
矩阵是几个向量的组合
[
x
1
y
1
z
1
k
1
x
2
y
2
z
2
k
2
x
3
y
3
z
3
k
3
]
\begin{bmatrix} x_1&y_1&z_1&k_1\\ x_2&y_2&z_2&k_2\\ x_3&y_3&z_3&k_3\\ \end{bmatrix}
x1x2x3y1y2y3z1z2z3k1k2k3
向量和矩阵的代数表示
向量可以用于表示 一个 多元齐次方程的系数,也可以表示自变量
- w 1 x 1 + w 2 x 2 + w 3 x 3 = 0 w_1x_1+w_2x_2+w_3x_3=0 w1x1+w2x2+w3x3=0
那么这个多元齐次方程的系数,可以用向量 W → W^→ W→表示W = [ w 1 w 2 w 3 ] \begin{bmatrix} w_1\\ w_2\\ w_3\\ \end{bmatrix} w1w2w3 ,自变量标为X = [ x 1 x 2 x 3 ] \begin{bmatrix} x_1\\ x_2\\ x_3\\ \end{bmatrix} x1x2x3
如果有多个多元齐次方程,但系数可能只有一组,而自变量可能有多组数据,如下多个多元齐次方程
| 第一组齐次方程 | 自变量为 |
|---|---|
| w 1 x 11 + w 2 x 12 + w 3 x 13 = 0 w_{1}x_{11}+w_2x_{12}+w_{3}x_{13}=0 w1x11+w2x12+w3x13=0 | X1 = [ x 11 x 12 x 13 ] \begin{bmatrix}x_{11}\\x_{12}\\x_{13}\\\end{bmatrix} x11x12x13 |
| w 1 x 21 + w 2 x 22 + w 3 x 23 = 0 w_{1}x_{21}+w_{2}x_{22}+w_3x_{23}=0 w1x21+w2x22+w3x23=0 | X2 = [ x 21 x 22 x 23 ] \begin{bmatrix}x_{21}\\x_{22}\\x_{23}\\\end{bmatrix} x21x22x23 |
| w 1 x 31 + w 2 x 32 + w 3 x 33 = 0 w_{1}x_{31}+w_{2}x_{32}+w_{3}x_{33}=0 w1x31+w2x32+w3x33=0 | X3 = [ x 31 x 32 x 33 ] \begin{bmatrix}x_{31}\\x_{32}\\x_{33}\\\end{bmatrix} x31x32x33 |
| W = [ w 1 w 2 w 3 ] \begin{bmatrix}w_{1}\\w_{2}\\w_{3}\\\end{bmatrix} w1w2w3 | X = [ x 11 x 21 x 31 x 12 x 22 x 32 x 13 x 23 x 33 ] X=\begin{bmatrix}x_{11}&x_{21}&x_{31}\\x_{12}&x_{22}&x_{32}\\x_{13}&x_{23}&x_{33}\\\end{bmatrix} X= x11x12x13x21x22x23x31x32x33 |
系数只有一组,即W = [ w 1 w 2 w 3 ] \begin{bmatrix} w_1\\ w_2\\ w_3\\ \end{bmatrix} w1w2w3 ,自变量数据有多组,X = [ x 11 x 21 x 31 x 12 x 22 x 32 x 13 x 23 x 33 ] \begin{bmatrix} x_{11}&x_{21}&x_{31}\\ x_{12}&x_{22}&x_{32}\\ x_{13}&x_{23}&x_{33}\\ \end{bmatrix} x11x12x13x21x22x23x31x32x33
这时候,要表示多元齐次方程组的计算式,需要将向量W转置后,再与X相乘
即
W
T
X
=
[
w
1
w
2
w
3
]
[
x
11
x
21
x
31
x
12
x
22
x
32
x
13
x
23
x
33
]
W^TX=\begin{bmatrix} w_1&w_2&w_3\\ \end{bmatrix}\begin{bmatrix} x_{11}&x_{21}&x_{31}\\ x_{12}&x_{22}&x_{32}\\ x_{13}&x_{23}&x_{33}\\ \end{bmatrix}
WTX=[w1w2w3]
x11x12x13x21x22x23x31x32x33
这是一种基础的矩阵乘法的代数意义,系数可能只有一组
- w 1 x 11 + w 2 x 12 + w 3 x 13 = 0 w_1x_{11}+w_2x_{12}+w_3x_{13}=0 w1x11+w2x12+w3x13=0
- w 1 x 21 + w 2 x 22 + w 3 x 23 = 0 w_1x_{21}+w_2x_{22}+w_3x_{23}=0 w1x21+w2x22+w3x23=0
- w 1 x 31 + w 2 x 32 + w 3 x 33 = 0 w_1x_{31}+w_2x_{32}+w_3x_{33}=0 w1x31+w2x32+w3x33=0
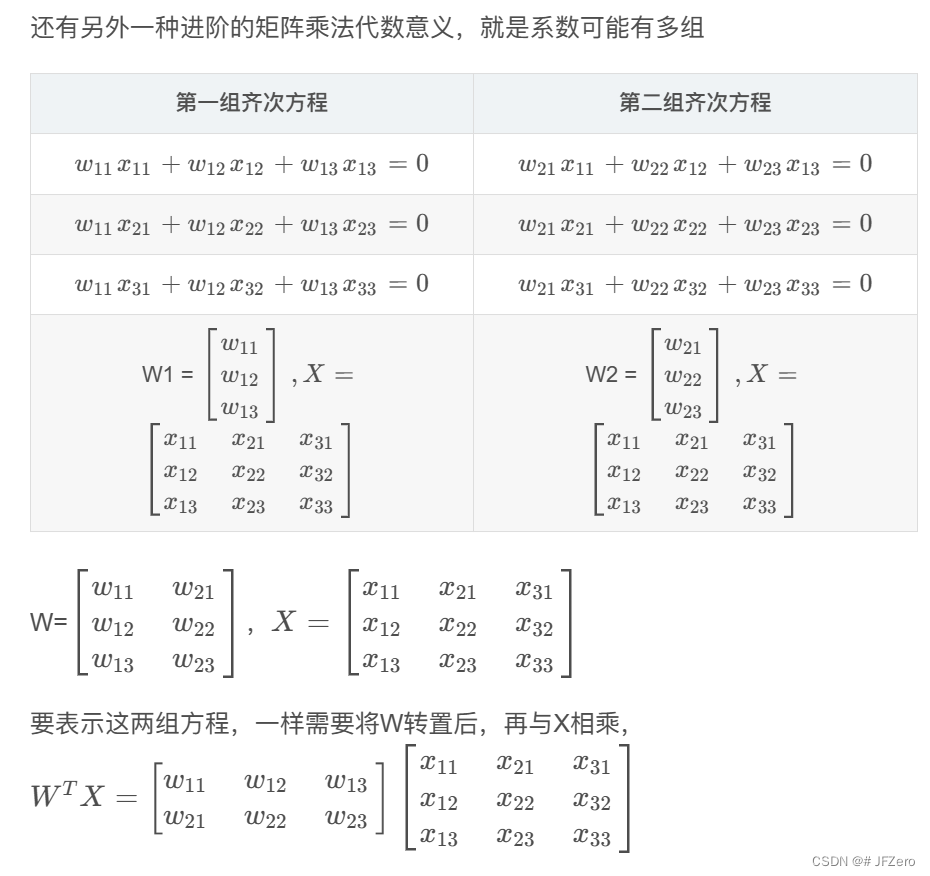
还有另外一种进阶的矩阵乘法代数意义,就是系数可能有多组
| 第一组齐次方程 | 第二组齐次方程 |
|---|---|
| w 11 x 11 + w 12 x 12 + w 13 x 13 = 0 w_{11}x_{11}+w_{12}x_{12}+w_{13}x_{13}=0 w11x11+w12x12+w13x13=0 | w 21 x 11 + w 22 x 12 + w 23 x 13 = 0 w_{21}x_{11}+w_{22}x_{12}+w_{23}x_{13}=0 w21x11+w22x12+w23x13=0 |
| w 11 x 21 + w 12 x 22 + w 13 x 23 = 0 w_{11}x_{21}+w_{12}x_{22}+w_{13}x_{23}=0 w11x21+w12x22+w13x23=0 | w 21 x 21 + w 22 x 22 + w 23 x 23 = 0 w_{21}x_{21}+w_{22}x_{22}+w_{23}x_{23}=0 w21x21+w22x22+w23x23=0 |
| w 11 x 31 + w 12 x 32 + w 13 x 33 = 0 w_{11}x_{31}+w_{12}x_{32}+w_{13}x_{33}=0 w11x31+w12x32+w13x33=0 | w 21 x 31 + w 22 x 32 + w 23 x 33 = 0 w_{21}x_{31}+w_{22}x_{32}+w_{23}x_{33}=0 w21x31+w22x32+w23x33=0 |
| W1 = [ w 11 w 12 w 13 ] , X = [ x 11 x 21 x 31 x 12 x 22 x 32 x 13 x 23 x 33 ] \begin{bmatrix}w_{11}\\w_{12}\\w_{13}\\\end{bmatrix},X=\begin{bmatrix}x_{11}&x_{21}&x_{31}\\x_{12}&x_{22}&x_{32}\\x_{13}&x_{23}&x_{33}\\\end{bmatrix} w11w12w13 ,X= x11x12x13x21x22x23x31x32x33 | W2 = [ w 21 w 22 w 23 ] , X = [ x 11 x 21 x 31 x 12 x 22 x 32 x 13 x 23 x 33 ] \begin{bmatrix}w_{21}\\w_{22}\\w_{23}\end{bmatrix},X=\begin{bmatrix}x_{11}&x_{21}&x_{31}\\x_{12}&x_{22}&x_{32}\\x_{13}&x_{23}&x_{33}\\\end{bmatrix} w21w22w23 ,X= x11x12x13x21x22x23x31x32x33 |
W= [ w 11 w 21 w 12 w 22 w 13 w 23 ] \begin{bmatrix}w_{11}&w_{21}\\w_{12}&w_{22}\\w_{13}&w_{23}\\\end{bmatrix} w11w12w13w21w22w23 , X = [ x 11 x 21 x 31 x 12 x 22 x 32 x 13 x 23 x 33 ] X=\begin{bmatrix}x_{11}&x_{21}&x_{31}\\x_{12}&x_{22}&x_{32}\\x_{13}&x_{23}&x_{33}\\\end{bmatrix} X= x11x12x13x21x22x23x31x32x33
要表示这两组方程,一样需要将W转置后,再与X相乘,
W
T
X
=
[
w
11
w
12
w
13
w
21
w
22
w
23
]
[
x
11
x
21
x
31
x
12
x
22
x
32
x
13
x
23
x
33
]
W^TX=\begin{bmatrix}w_{11}&w_{12}&w_{13}\\w_{21}&w_{22}&w_{23}\\\end{bmatrix}\begin{bmatrix}x_{11}&x_{21}&x_{31}\\x_{12}&x_{22}&x_{32}\\x_{13}&x_{23}&x_{33}\\\end{bmatrix}
WTX=[w11w21w12w22w13w23]
x11x12x13x21x22x23x31x32x33
最终得到的是2x3的矩阵,第一行表示第一组的齐次方程,第二行表示第二组的齐次方程
我常常迷糊的矩阵乘法,忽然变得眉目清晰
并且从后边穿越回来后,似乎更透彻了我的天呐
仿佛参透天机
注意:W,就相当于自变量的权重系数,它所表示的代数意义和几何意义其实是异曲同工的!!!!!
向量和矩阵的几何表示
一维向量与矩阵
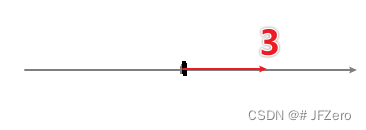
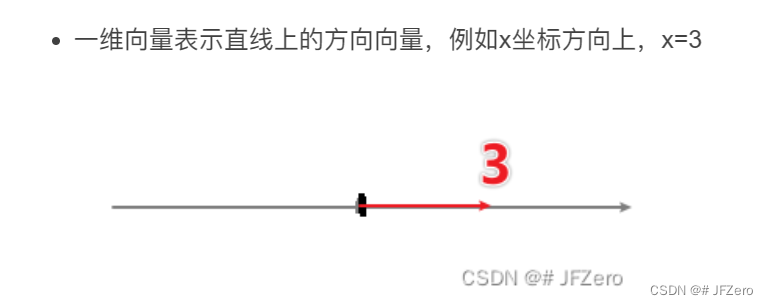
- 一维向量表示直线上的方向向量,例如x坐标方向上,x=3
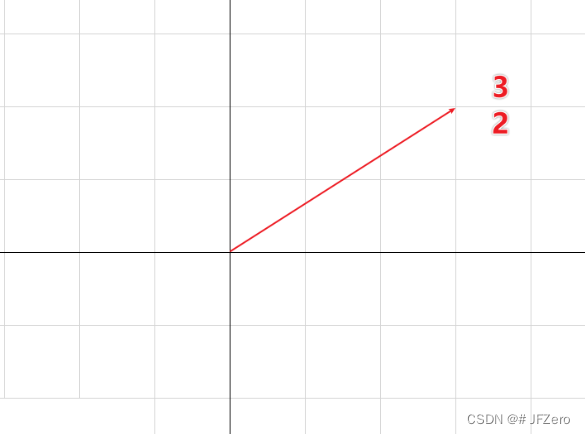
二维向量与矩阵
- 二维向量表示XY平面上的方向向量,如 [ x y ] = [ 3 2 ] \begin{bmatrix} x\\ y\\ \end{bmatrix}=\begin{bmatrix} 3\\ 2\\ \end{bmatrix} [xy]=[32]
当然,xy只是我们几何上习惯的叫法,如果要跟代数产生联想,其实可以把x和y,当成x1和x2来叫
- 二维矩阵,则表示多个二维向量的组合,如 [ x y ] : [ 3 3 5 2 4 9 ] \begin{bmatrix} x\\ y\\ \end{bmatrix}: \begin{bmatrix} 3&3&5\\ 2&4&9\\ \end{bmatrix} [xy]:[323459],这是三个二维向量,组合成的矩阵
三维向量与矩阵
- 三维向量表示xyz空间上的方向向量 [ x y z ] = [ 0 1 1 ] \begin{bmatrix} x\\ y\\ z\\ \end{bmatrix}=\begin{bmatrix} 0\\ 1\\ 1\\ \end{bmatrix} xyz = 011
哭了,用上matplotlib吧
- 三维矩阵则表示在xyz空间上的多个向量组合,如 [ x y z ] : [ 0 2 3 9 1 1 6 0 1 8 9 0 ] \begin{bmatrix} x\\ y\\ z\\ \end{bmatrix}:\begin{bmatrix} 0&2&3&9\\ 1&1&6&0\\ 1&8&9&0\\ \end{bmatrix} xyz : 011218369900 ,这是4个三维向量组成的矩阵
同样的,xyz只是几何上的习惯叫法,要跟代数产生联想的话,也可以叫做 x1 和x2和x3,表示3个维度
向量和矩阵的乘法
向量乘法,一般指的是点乘,即
A =
[
a
1
a
2
a
3
]
\begin{bmatrix} a_1\\ a_2\\ a_3\\ \end{bmatrix}
a1a2a3
,B =
[
b
1
b
2
b
3
]
\begin{bmatrix} b_1\\ b_2\\ b_3\\ \end{bmatrix}
b1b2b3
,则
A
B
=
a
1
∗
b
1
+
a
2
∗
b
2
+
a
3
∗
b
3
AB = a_1*b_1+ a_2*b_2+ a_3*b_3
AB=a1∗b1+a2∗b2+a3∗b3
向量点乘的代数意义
我猜,向量乘法,可以看作是自变量系数和自变量数值的相乘再加和
即
y
=
a
1
x
1
+
a
2
x
2
+
a
3
x
3
y = a_1x_1+a_2x_2+a_3x_3
y=a1x1+a2x2+a3x3
A =
[
a
1
a
2
a
3
]
\begin{bmatrix} a_1\\ a_2\\ a_3\\ \end{bmatrix}
a1a2a3
,B =
[
x
1
x
2
x
3
]
\begin{bmatrix} x_1\\ x_2\\ x_3\\ \end{bmatrix}
x1x2x3
,
y
=
A
T
B
=
[
a
1
a
2
a
3
]
[
x
1
x
2
x
3
]
y=A^TB=\begin{bmatrix} a_1&a_2&a_3\\ \end{bmatrix}\begin{bmatrix} x_1\\ x_2\\ x_3\\ \end{bmatrix}
y=ATB=[a1a2a3]
x1x2x3
向量和矩阵点乘的几何意义
几何数学意义:权重系数加权求和+升降维度
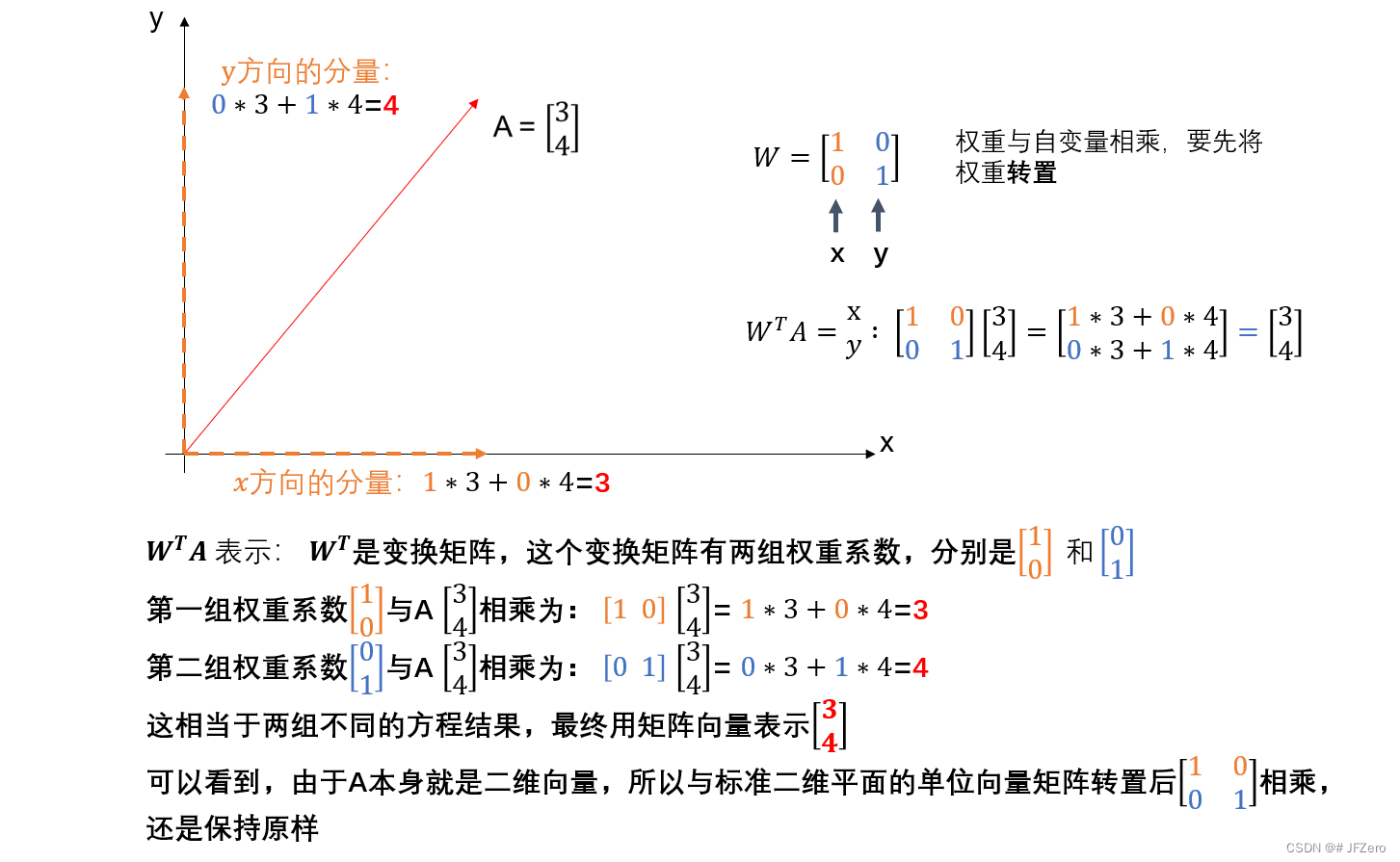
- 向量基础点乘,是将一个向量的各维度分量
加权求和,投影在标准维度上。
例如, A = [ 3 4 ] A = \begin{bmatrix} 3\\ 4\\ \end{bmatrix} A=[34]是一个二维向量,它的标准维度,应该标准二维平面上的x、y两个正交向量维度
即 x = [ 1 0 ] x= \begin{bmatrix} 1\\ 0\\ \end{bmatrix} x=[10], y = [ 0 1 ] y= \begin{bmatrix} 0\\ 1\\ \end{bmatrix} y=[01],用矩阵表示则是 W = [ 1 0 0 1 ] W = \begin{bmatrix} 1&0\\ 0&1\\ \end{bmatrix} W=[1001]
要知道,这里的 W = [ 1 0 0 1 ] W = \begin{bmatrix} 1&0\\ 0&1\\ \end{bmatrix} W=[1001],等价于代数中的两组权重系数,
| 第一组齐次方程 | 第二组齐次方程 |
|---|---|
| w 11 x 11 + w 12 x 12 = 3 w_{11}x_{11}+w_{12}x_{12}=3 w11x11+w12x12=3 | w 21 x 11 + w 22 x 12 = 4 w_{21}x_{11}+w_{22}x_{12}=4 w21x11+w22x12=4 |
| [ w 11 w 12 ] = [ 1 0 ] \begin{bmatrix}w_{11}\\w_{12}\\\end{bmatrix}= \begin{bmatrix}1\\0\\\end{bmatrix} [w11w12]=[10] | [ w 21 w 22 ] = [ 0 1 ] \begin{bmatrix}w_{21}\\w_{22}\\\end{bmatrix}= \begin{bmatrix}0\\1\\\end{bmatrix} [w21w22]=[01] |
| W = [ w 11 w 21 w 12 w 22 ] = [ 1 0 0 1 ] W=\begin{bmatrix}w_{11}&w_{21}\\w_{12}&w_{22}\\\end{bmatrix}=\begin{bmatrix}1&0\\0&1\\\end{bmatrix} W=[w11w12w21w22]=[1001] |
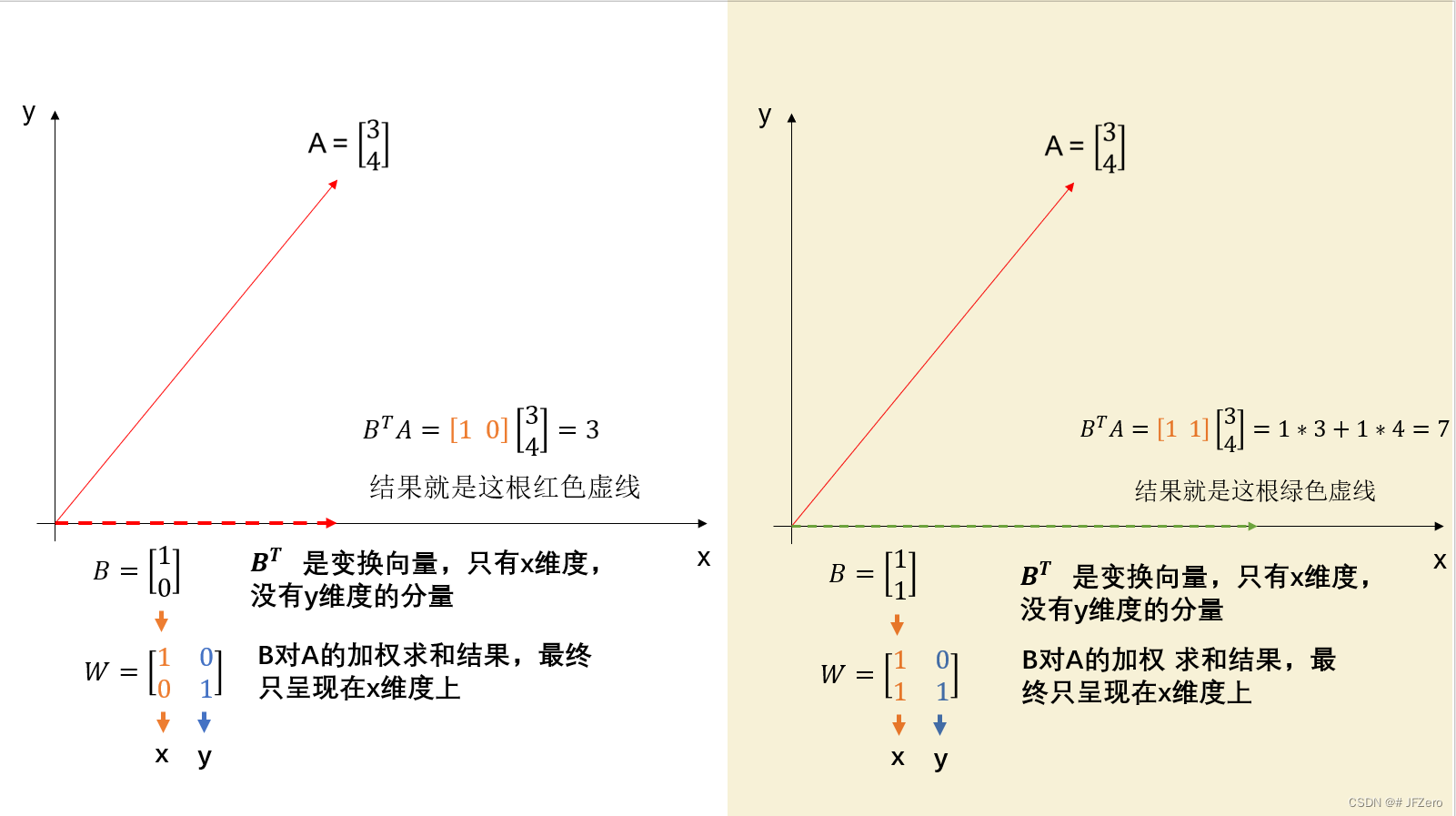
因此,所谓的变换矩阵W,其实就是各维度(组)分量的加权求和
并且,一个用于变换的向量表示这个空间只有一个维度,实际就是一维空间
例如变换向量B =
[
1
0
]
\begin{bmatrix} 1\\ 0\\ \end{bmatrix}
[10]表示只有x这个维度,没有y维度
二维向量A经过向量B的变换,表示A向量会根据B向量进行加权求和,结果为x维度值,并且删掉y维度
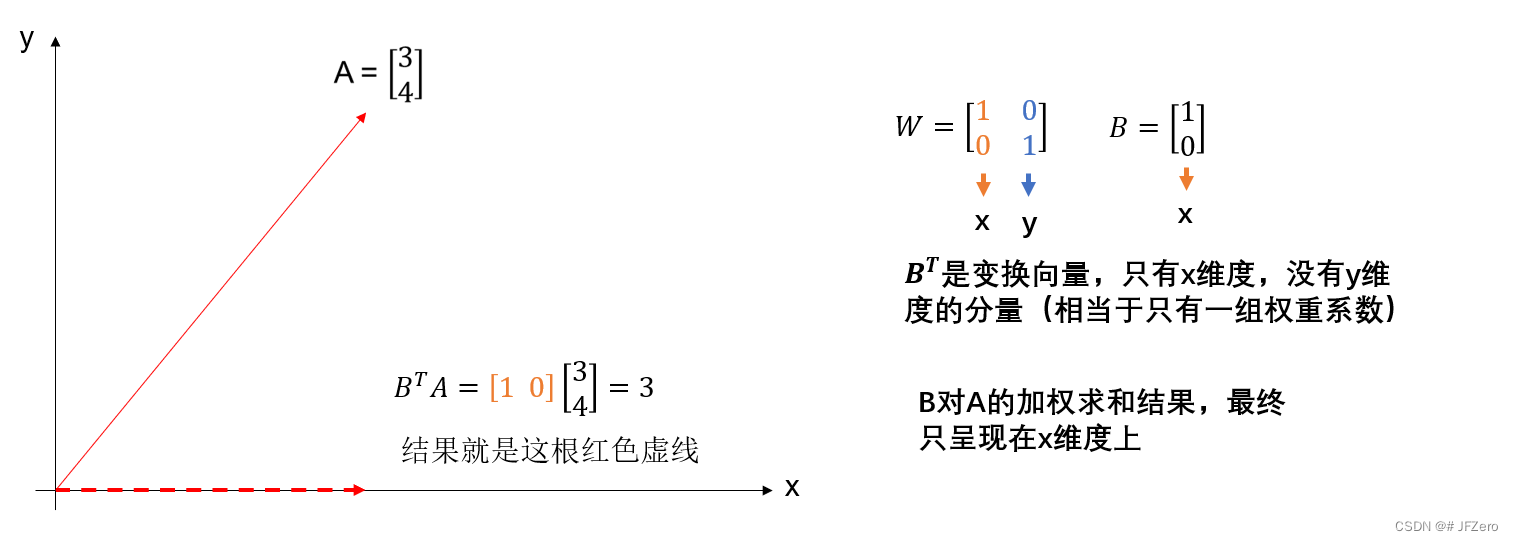
因此,就像是回到上边所说的一维空间
所以说,一个变换向量B乘以另外一个向量A(两个向量相乘),实际在几何里就是降维:将高维向量降为一维的过程
但要注意,一般向量相乘时,一般用
B
T
A
表示,
B^TA表示,
BTA表示,
即
B
T
A
=
[
1
0
]
[
3
4
]
=
3
即B^TA =\begin{bmatrix} 1&0\\ \end{bmatrix}\begin{bmatrix} 3\\ 4\\ \end{bmatrix}=3
即BTA=[10][34]=3,最终降成一维
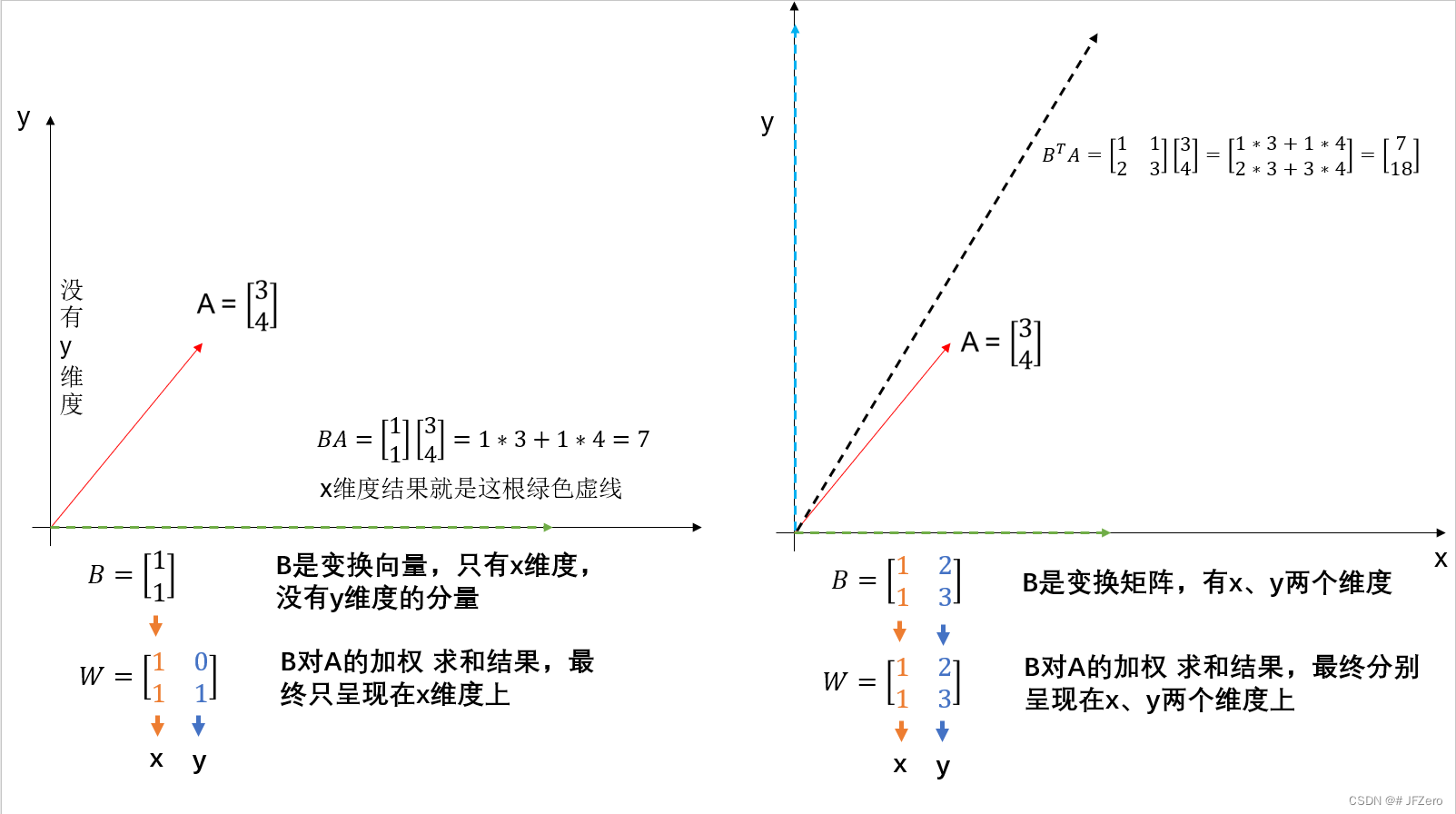
如果变换向量为B= [ 1 1 ] \begin{bmatrix} 1\\1\\ \end{bmatrix} [11]
当B= [ 1 1 ] \begin{bmatrix} 1\\1\\ \end{bmatrix} [11]转置后,与A= [ 3 4 ] \begin{bmatrix} 3\\4\\ \end{bmatrix} [34]相乘时,代表什么呢?
表示对A向量加权求和后,结果只呈现在x维度
A向量中,3的权重系数是1,4的权重系数也是1,那么加权求和结果是7
由于B只有一组权重系数,所以相当于只有一个维度的数据,即x维度数值为7
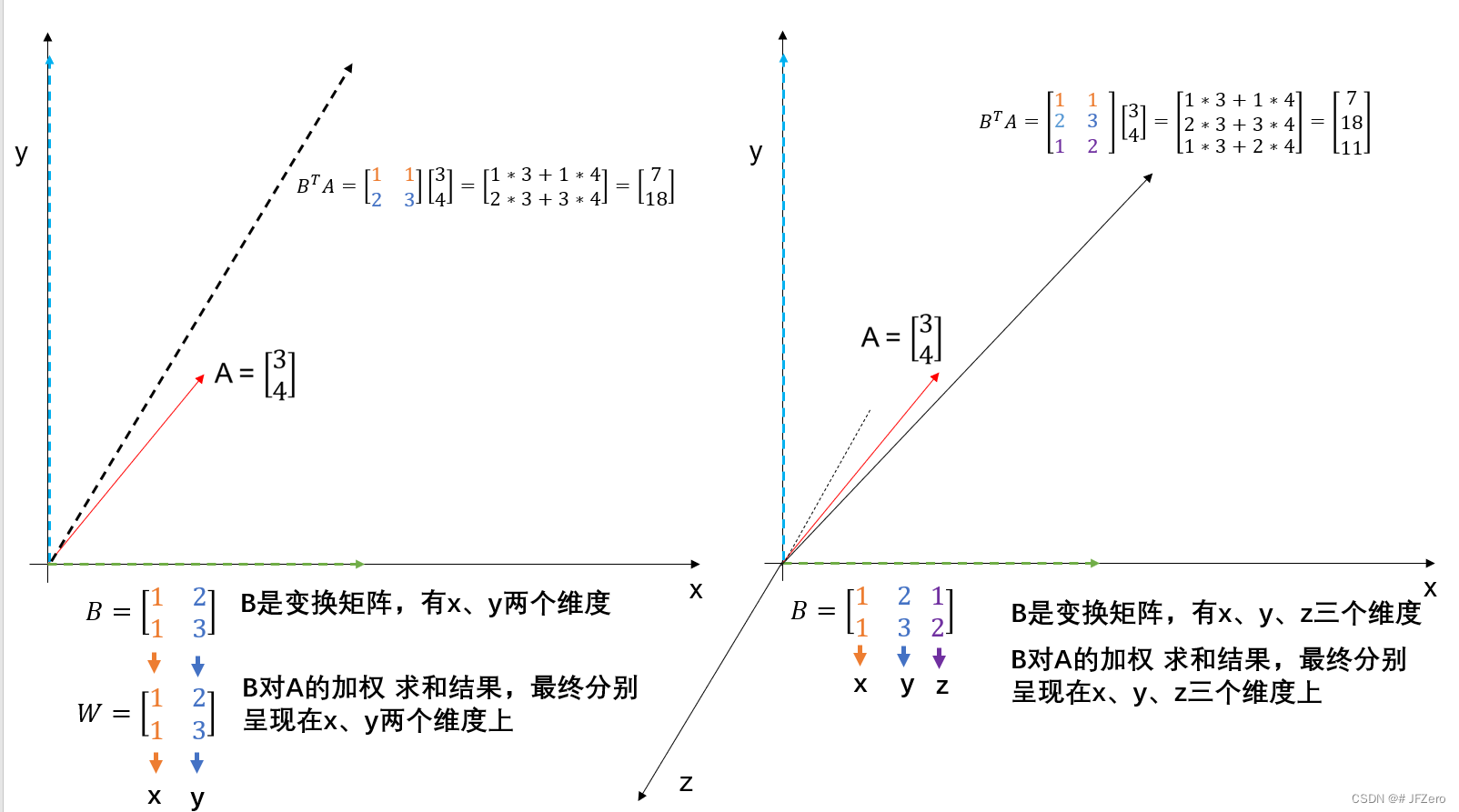
如果变换矩阵为B= [ 1 2 1 3 ] \begin{bmatrix} 1&2\\1&3\\ \end{bmatrix} [1123]
当B= [ 1 2 1 3 ] \begin{bmatrix} 1&2\\1&3\\ \end{bmatrix} [1123]转置后,与A= [ 3 4 ] \begin{bmatrix} 3\\4\\ \end{bmatrix} [34]相乘时,代表什么呢?
表示对A向量加权求和后,结果分别呈现在x、y两个维度上
在x维度上的权重系数分别为1和1,对A向量加权求和即为1*3+1*4=7
在y维度上的权重系数分别为2和3,对A向量加权求和即为2*3+3*4=18
因此,最终A向量经过B矩阵的变换,最终变为新的二维向量 [ 7 18 ] \begin{bmatrix} 7\\18\\ \end{bmatrix} [718]
如果变换矩阵为B= [ 1 2 1 1 3 2 ] \begin{bmatrix} 1&2&1\\1&3&2\\ \end{bmatrix} [112312]
当B= [ 1 2 1 1 3 2 ] \begin{bmatrix} 1&2&1\\1&3&2\\ \end{bmatrix} [112312]转置后,与A= [ 3 4 ] \begin{bmatrix} 3\\4\\ \end{bmatrix} [34]相乘时,代表什么呢?
表示对A向量加权求和后,结果分别呈现在x、y、z三个维度上
在x维度上的权重系数分别为1和1,对A向量加权求和即为1*3+1*4=7
在y维度上的权重系数分别为2和3,对A向量加权求和即为2*3+3*4=18
在z维度上的权重系数分别为1和2,对A向量加权求和即为1*3+2*4=11
因此,最终A向量经过B矩阵的变换,最终变为新的三维向量
低维升高维
所以几何中的变换矩阵与代数中权重系数的关系,其实是一致的
`代数中的权重系数矩阵W,需要经过转置 W T W^T WT,即可转化为几何的变换矩阵
几何功能效果:伸缩、旋转、伸缩+旋转
前边只是通过代数,来理解向量矩阵相乘,在几何上的意义
那么,向量矩阵相乘,为什么要投射到几何上认识呢?
em。。。我问了一个自己也无法回答的问题。。。
那先跳过这个问题吧,直接来看看它的几何效果
首先是伸缩功能。
伸缩功能,就是让向量在原空间里,保持一样的方向,只进行长度的改变。
伸缩功能,也是要靠变换矩阵来实现的。
例如要让向量 A = [ 3 4 ] A=\begin{bmatrix} 3\\ 4\\ \end{bmatrix} A=[34]在x 和 y方向上各伸长β倍
就需要左乘一个二维的变换矩阵 B = [ β 0 0 β ] = β [ 1 0 0 1 ] B = \begin{bmatrix} β&0\\ 0&β\\ \end{bmatrix}=β\begin{bmatrix} 1&0\\ 0&1\\ \end{bmatrix} B=[β00β]=β[1001]
即
A
′
=
B
A
=
[
β
0
0
β
]
[
3
4
]
=
[
β
∗
3
+
0
∗
4
0
∗
3
+
β
∗
4
]
=
[
3
β
4
β
]
A^{'}=BA = \begin{bmatrix} β&0\\ 0&β\\ \end{bmatrix}\begin{bmatrix} 3\\ 4\\ \end{bmatrix}= \begin{bmatrix} β*3+0*4\\ 0*3+β*4\\ \end{bmatrix} =\begin{bmatrix} 3β\\ 4β\\ \end{bmatrix}
A′=BA=[β00β][34]=[β∗3+0∗40∗3+β∗4]=[3β4β]
其次是旋转功能。
单纯的旋转功能,是不改变原向量的长度(专业称模长,为什么要这么专业称呢,不是很接地气),只改变原向量的方向
旋转功能,也是要靠变换矩阵来实现的。
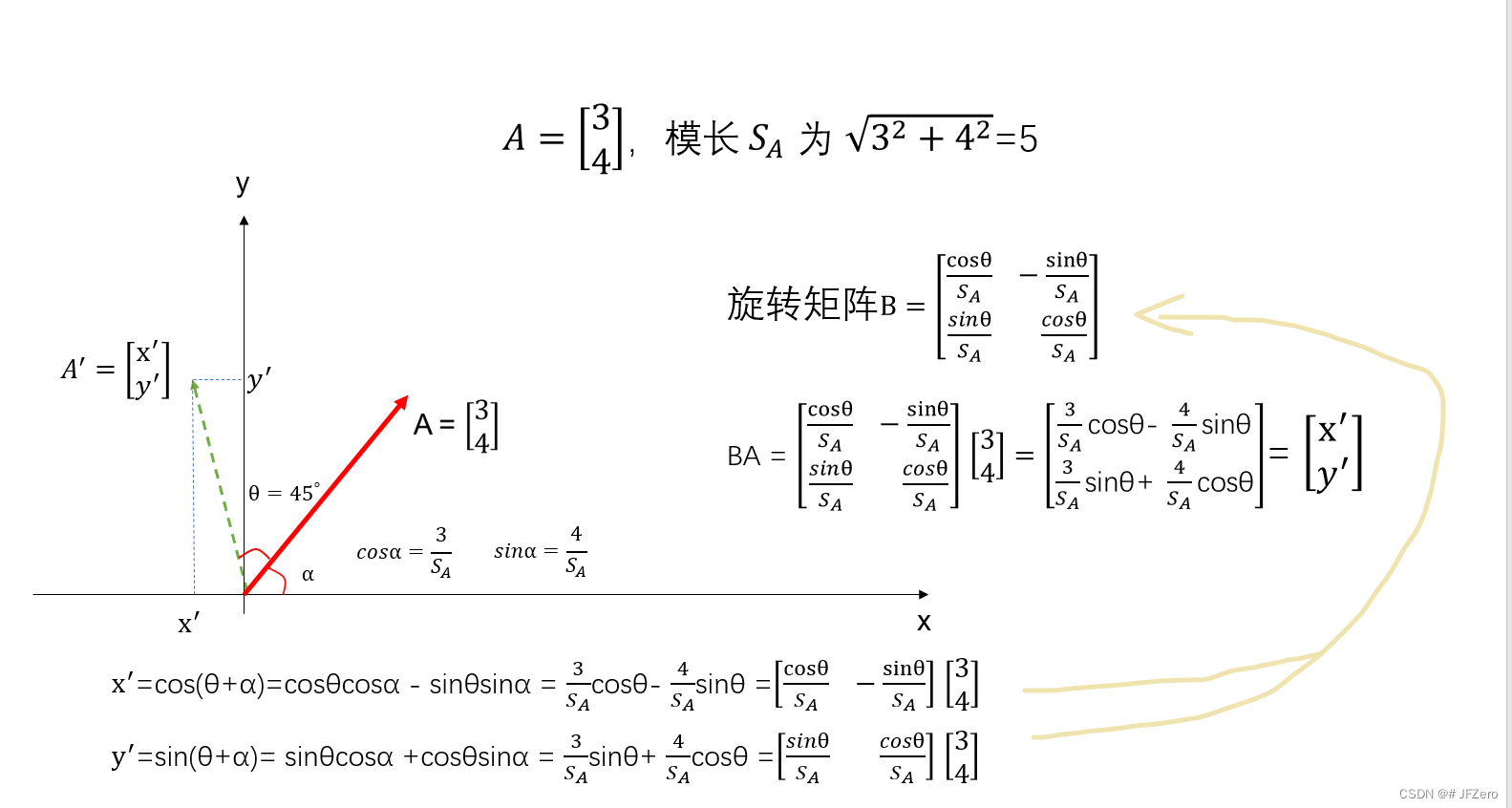
例如要让向量 A = [ 3 4 ] A=\begin{bmatrix} 3\\ 4\\ \end{bmatrix} A=[34]在x分量,y分量长度不变为 S A S_A SA,但是要逆时针旋转θ度
就需要左乘一个二维的变换矩阵 B = 1 S A [ c o s θ − s i n θ s i n θ c o s θ ] B = \frac{1}{S_A}\begin{bmatrix} cosθ&-sinθ\\ sinθ&cosθ\\ \end{bmatrix} B=SA1[cosθsinθ−sinθcosθ]
即 A ′ = B A = 1 S A [ c o s θ − s i n θ s i n θ c o s θ ] [ 3 4 ] A^{'}=BA = \frac{1}{S_A}\begin{bmatrix} cosθ&-sinθ\\ sinθ&cosθ\\ \end{bmatrix}\begin{bmatrix} 3\\ 4\\ \end{bmatrix} A′=BA=SA1[cosθsinθ−sinθcosθ][34]
当然,上边是二维平面内的绕0点旋转的简单案例,实际还有三维空间上的绕轴旋转,绕0点旋转等等,如果可以推导出来,就可以用三维空间上的旋转变换矩阵,替换掉我曾经用土法进行的三维旋转甜甜圈
好的!有空再推导一下,然后让甜甜圈用高级的三维旋转变换矩阵,来转圈圈~~
…发散的脑子,果然会给自己挖坑…
最后是旋转+伸缩
旋转+伸缩,相当于让向量A进行两次矩阵变换
先旋转: B 1 = 1 S A [ c o s θ − s i n θ s i n θ c o s θ ] B1 = \frac{1}{S_A}\begin{bmatrix} cosθ&-sinθ\\ sinθ&cosθ\\ \end{bmatrix} B1=SA1[cosθsinθ−sinθcosθ]
- 旋转后 A ′ = B 1 A = 1 S A [ c o s θ − s i n θ s i n θ c o s θ ] [ 3 4 ] A^{'}=B_1A = \frac{1}{S_A}\begin{bmatrix} cosθ&-sinθ\\ sinθ&cosθ\\ \end{bmatrix}\begin{bmatrix} 3\\ 4\\ \end{bmatrix} A′=B1A=SA1[cosθsinθ−sinθcosθ][34]
再伸缩: B 2 = β [ 1 0 0 1 ] B_2 = β\begin{bmatrix} 1&0\\ 0&1\\ \end{bmatrix} B2=β[1001]
- 伸缩后 A ′ ′ = B 2 A ′ = β S A [ 1 0 0 1 ] [ c o s θ − s i n θ s i n θ c o s θ ] [ 3 4 ] A^{''}=B_2A^{'} = \frac{β}{S_A}\begin{bmatrix} 1&0\\ 0&1\\ \end{bmatrix}\begin{bmatrix} cosθ&-sinθ\\ sinθ&cosθ\\ \end{bmatrix}\begin{bmatrix} 3\\ 4\\ \end{bmatrix} A′′=B2A′=SAβ[1001][cosθsinθ−sinθcosθ][34]
根据矩阵乘法的性质, A ′ ′ = β S A [ c o s θ − s i n θ s i n θ c o s θ ] [ 3 4 ] A^{''}= \frac{β}{S_A}\begin{bmatrix} cosθ&-sinθ\\ sinθ&cosθ\\ \end{bmatrix}\begin{bmatrix} 3\\ 4\\ \end{bmatrix} A′′=SAβ[cosθsinθ−sinθcosθ][34]
最终得到旋转θ度,伸缩β倍的变换矩阵为 β S A [ c o s θ − s i n θ s i n θ c o s θ ] \frac{β}{S_A}\begin{bmatrix} cosθ&-sinθ\\ sinθ&cosθ\\ \end{bmatrix} SAβ[cosθsinθ−sinθcosθ]
矩阵和矩阵的乘法
实际上,矩阵和矩阵的乘法,与向量和矩阵乘法的本质一样。
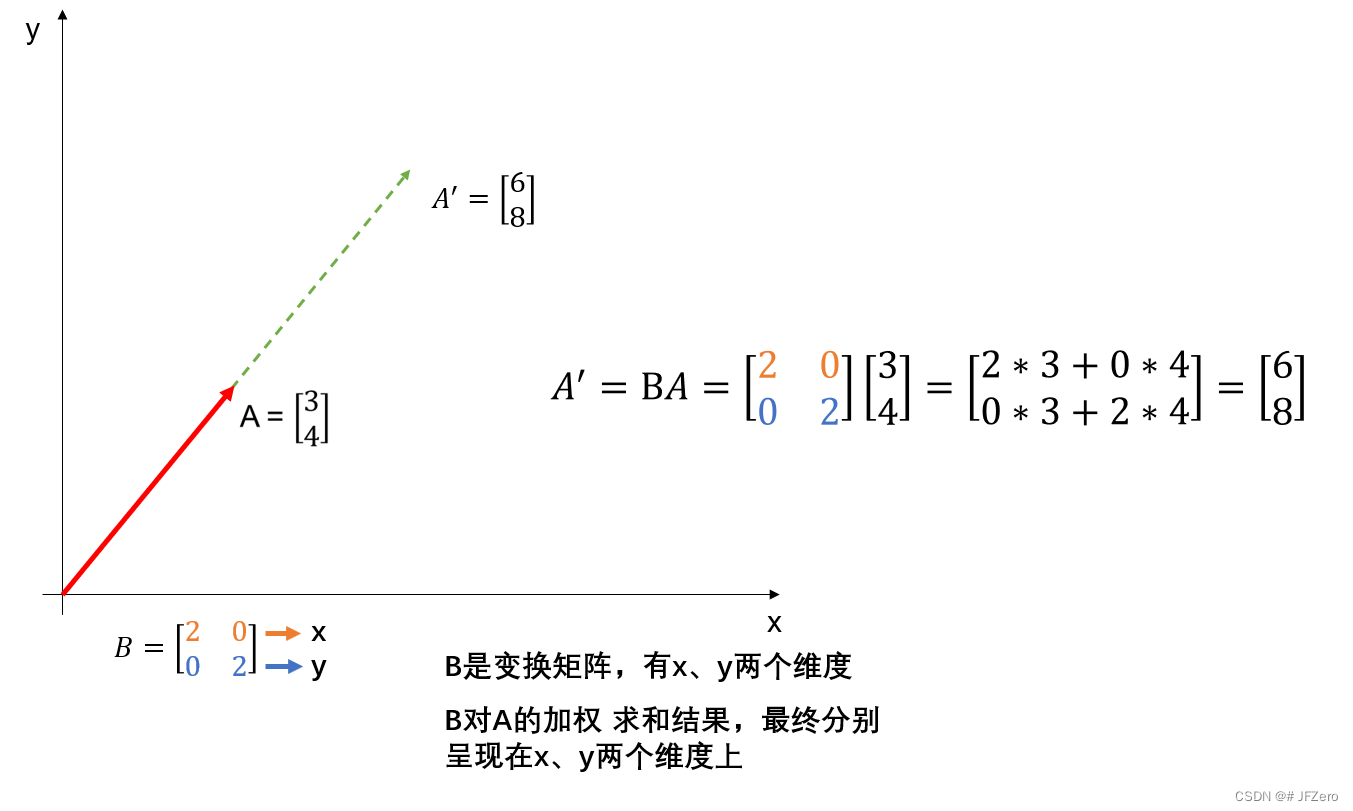
例如,变换矩阵B与向量A的相乘:BA
- 在代数意义上,是对向量A里的每个分量乘以对应的权重系数
- 在几何意义上,是对向量A【改变维度】【旋转伸缩】等变换
而,变换矩阵B与矩阵A的相乘:BA
矩阵A,实际是由多个向量组成的矩阵
向量A= [ 3 4 ] \begin{bmatrix} 3\\ 4\\ \end{bmatrix} [34],矩阵 A= [ 3 1 4 4 2 9 ] \begin{bmatrix} 3&1&4\\ 4&2&9\\ \end{bmatrix} [341249]由 3 个二维向量 [ 3 4 ] \begin{bmatrix} 3\\ 4\\ \end{bmatrix} [34]、 [ 1 2 ] \begin{bmatrix} 1\\ 2\\ \end{bmatrix} [12]、 [ 4 9 ] \begin{bmatrix} 4\\ 9\\ \end{bmatrix} [49]组合成的
那变换矩阵B与矩阵A相乘,其实就是将矩阵A里的每一个向量,逐一进行矩阵B的变换
例如变换矩阵B= [ 2 1 1 2 ] \begin{bmatrix} 2&1\\ 1&2\\ \end{bmatrix} [2112],与矩阵A= [ 3 1 4 4 2 9 ] \begin{bmatrix} 3&1&4\\ 4&2&9\\ \end{bmatrix} [341249]相乘,则相当于
[ 2 1 1 2 ] \begin{bmatrix} 2&1\\ 1&2\\ \end{bmatrix} [2112] [ 3 4 ] \begin{bmatrix} 3\\ 4\\ \end{bmatrix} [34]、 [ 2 1 1 2 ] \begin{bmatrix} 2&1\\ 1&2\\ \end{bmatrix} [2112] [ 1 2 ] \begin{bmatrix} 1\\ 2\\ \end{bmatrix} [12]、 [ 2 1 1 2 ] \begin{bmatrix} 2&1\\ 1&2\\ \end{bmatrix} [2112] [ 4 9 ] \begin{bmatrix} 4\\ 9\\ \end{bmatrix} [49]
对A矩阵里的每个向量,进行一样的旋转伸缩升降维等变换
所以,矩阵与矩阵的乘法,
-
从代数上看,是多组权重系数,与自变量的对应相乘
-
从几何上看,就是对向量进行批量的变换操作
当我重新梳理完矩阵的旋转、伸缩里对应的几何意义后,我对奇异值,已经忘得差不多干干净净的了
人类的海马体,就是这么不争气
看看别的up主对奇异值分解的推导,很生动,很形象
唯一的问题是,我还不是很理解一些矩阵的基础知识
比如矩阵的特征分解,但要了解特征分解,还需要从另外一个视角,来认识矩阵与向量、矩阵与矩阵相乘
⭐坐标系变换:向量、矩阵乘法
在前边的了解里,矩阵和矩阵,或矩阵和向量相乘,几何上是进行【升降维】【旋转伸缩】等变换效果。
但最终变换后的矩阵,都是基于正交基坐标系构成的标准平面(xy构成)、标准空间(xyz)等
而向量、矩阵乘法的几何意义,还可以从坐标系变换的角度看待。
打个比喻,运动是相对的
向量存在于一个平面、空间、超平面中,就像一个人存在于一个星球中。
之前的几何视角,是标准坐标系 I I I固定,向量进行变换
现在的几何视角,是向量固定,坐标系进行变换
参考矩阵乘法:坐标系变换,仿佛顿悟,又带一些迷离
按我看完后的理解,BA矩阵相乘,从坐标系变换的角度来看,B是一个坐标系
矩阵B中的每一个向量,都是坐标系的基(但不是单位正交基),而A则是坐标系B中的一个向量
啊~~~~国庆到啦~10天后再梳理吧


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









