







 本文介绍了3D打印中的一种优化技术——近凸分解与层叠,通过创建搜索子空间、分割和配置组件,实现高效打印。首先,通过形状和空间相似性度量形成初始簇集,然后优化组件属性如凹度、表面角度、尺寸和误差,最终确定组件的放置位置和旋转角度,以减少支撑结构并提高打印质量。
本文介绍了3D打印中的一种优化技术——近凸分解与层叠,通过创建搜索子空间、分割和配置组件,实现高效打印。首先,通过形状和空间相似性度量形成初始簇集,然后优化组件属性如凹度、表面角度、尺寸和误差,最终确定组件的放置位置和旋转角度,以减少支撑结构并提高打印质量。
声明:文中所有观点仅代表个人见解,若有不妥之处欢迎指正。
这篇论文于2018年 被 SCI 1区 "Additive Manufacturing"录用。原文链接:http://hpcg.purdue.edu/bbenes/papers/Demir18AM.pdf
目录
2.1Search Subspace Creation 创建搜索子空间
2.3Configuration 确定组件的放置位置及旋转角度
1.Overview
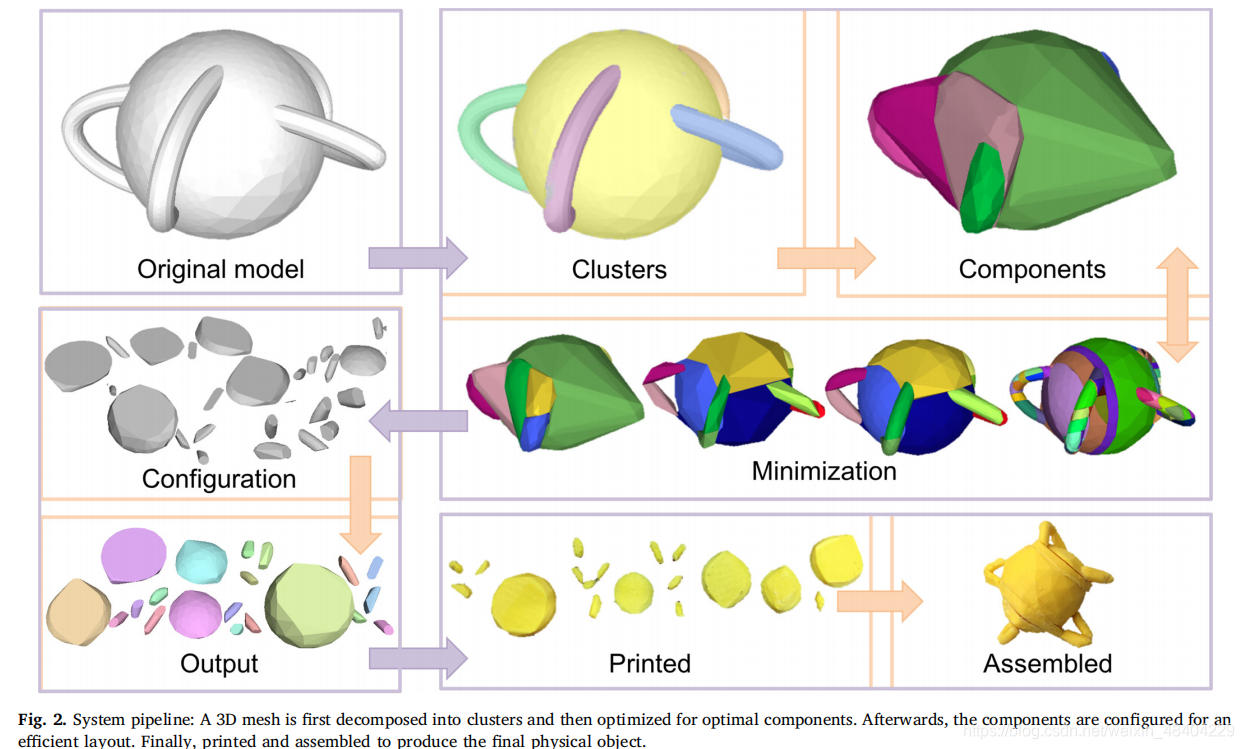
输入:未标记的网格模型(三角面片无规则无组织无序),
(1)Cluster:通过定义的度量计算三角面片的相似性,得到最初的相似三角面片簇集,然后计算空间相似度对簇集进行合并和分割,得到最初搜索子空间(search subspace)
(2)Components-Minimization: 对搜索子空间进行剖分得到组件,然后迭代的减小目标函数,收敛得到最后的解集
(3)Configuration:确定剖分后的组件的放置位置及旋转角度
输出:上一步得到的剖分后的有明确位置及旋转角度的组件
打印->组装->End
2.Decomposition(剖分)
剖分分成两部分:创建搜索子空间,分割。
2.1Search Subspace Creation 创建搜索子空间
先介绍两个度量公式,均在作者15年发表的文章(“Coupled Segmentation and Similarity Detection for Architectural Models ”)中给出了定义:
形状差异性度量:
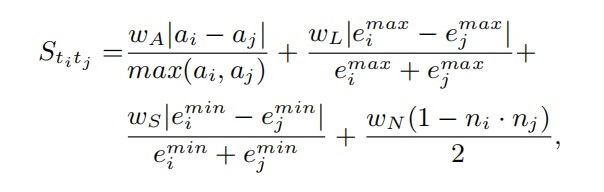
这里ti,tj代表两个三角面片,ai,aj是其面积,ei,ej是其边长,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









