









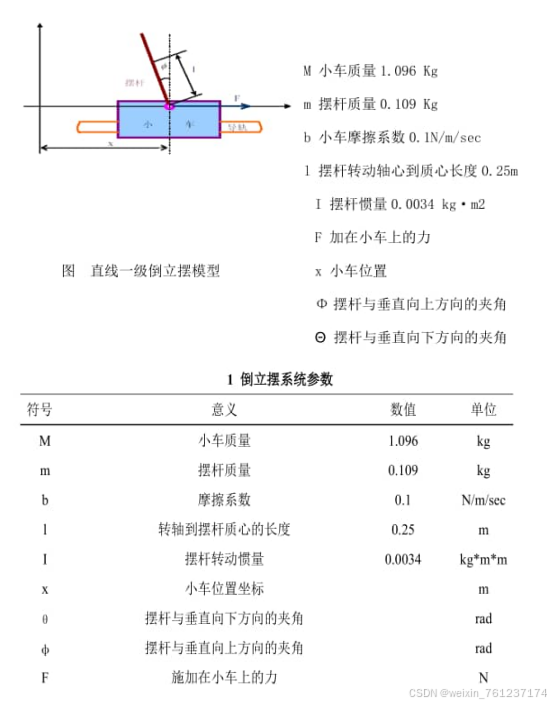
1.研究对象
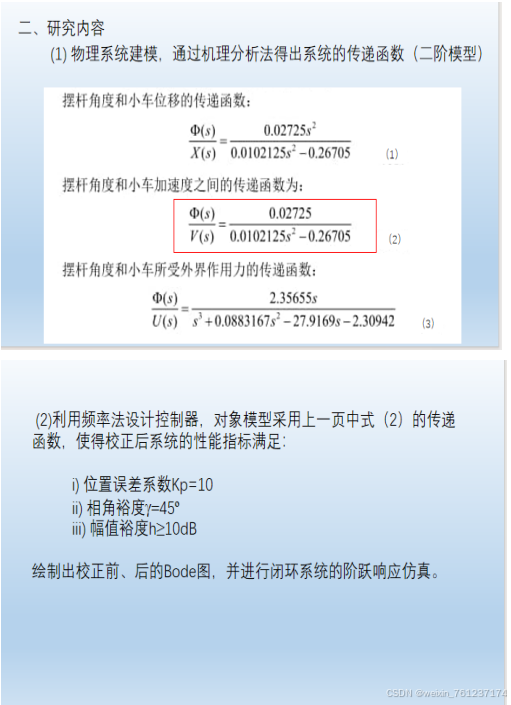
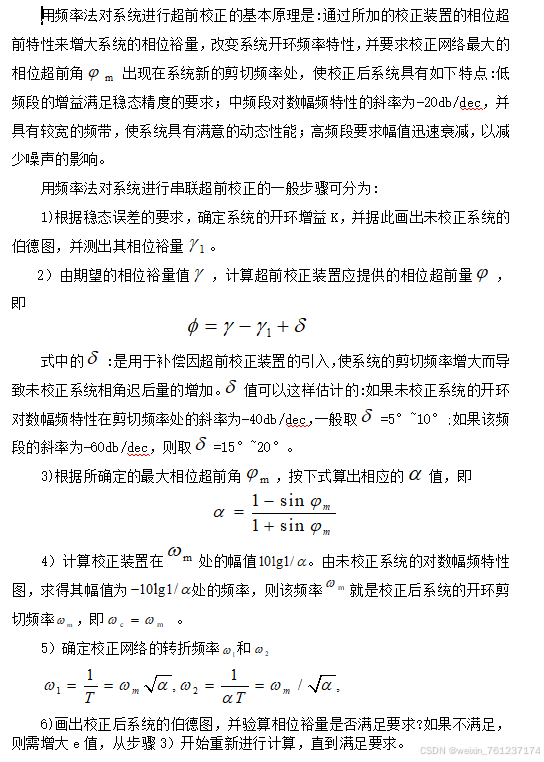
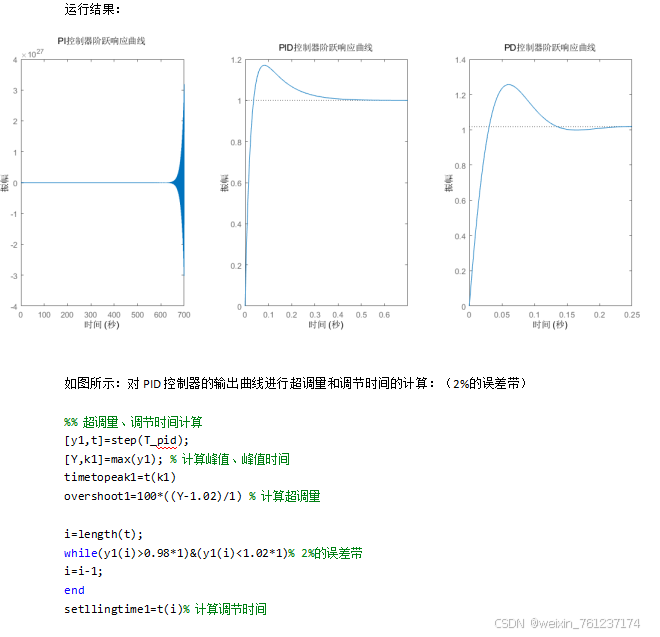
2.频率法对系统进行超前校正

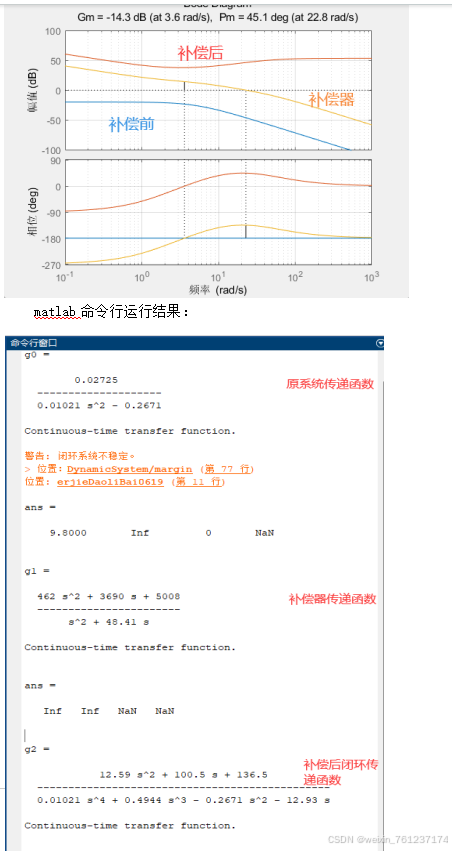
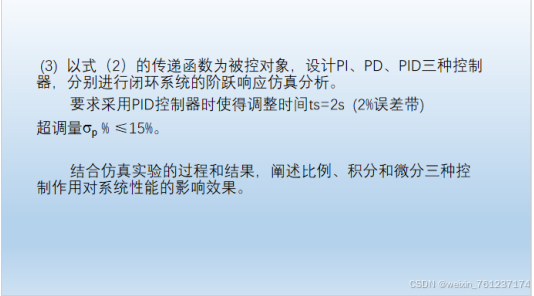
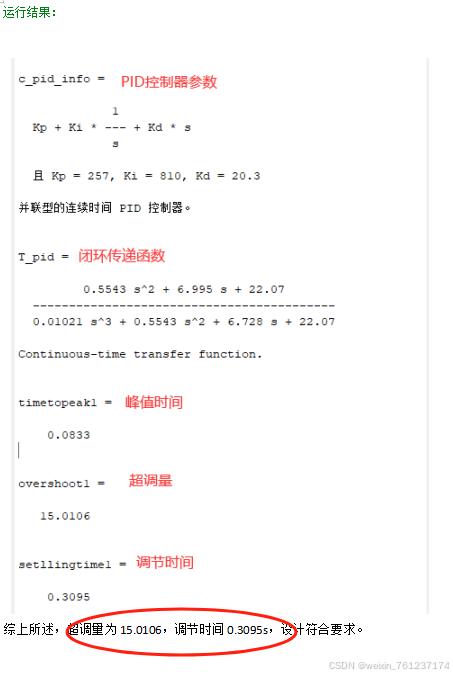
3.设计P1、PD、PID三种控制暗分别进行闭环系统的阶跃响应仿真分析
实现代码:
clc
clear all
close all
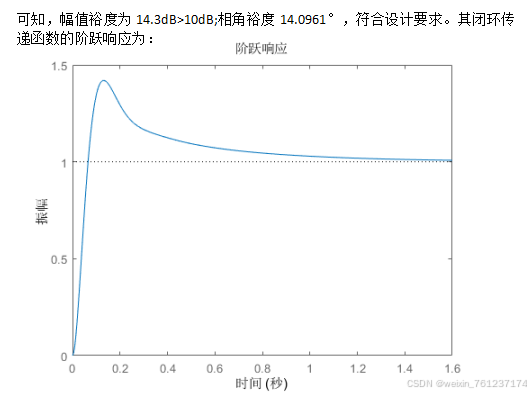
%% 建模
num=0.02725;
den=[0.0102125 0 -0.26705];%分母多项式展开
g0=tf(num,den)
%P、I、PID参数
[c_pi_info]=pidtune(g0,‘PI’)
T_pi=feedback(c_pi_info*g0,1)
subplot(1,3,1)
step(T_pi)
title(‘PI控制器阶跃响应曲线’)
[c_pid_info]=pidtune(g0,‘PID’)
T_pid=feedback(c_pid_info*g0,1)
subplot(1,3,2)
step(T_pid)
title(‘PID控制器阶跃响应曲线’)
[c_pd_info]=pidtune(g0,‘PD’)
T_pd=feedback(c_pd_info*g0,1)
subplot(1,3,3)
step(T_pd)
title(‘PD控制器阶跃响应曲线’)
输出分析:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











